

Методы описания динамических свойств звеньев и систем
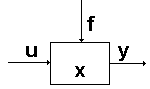
Динамический режим работы возмущающих и управляющих воздействий и является следствием инерционности элементов системы.
![]()
Если исключить из уравнений внутреннюю переменную Х, получим уравнение, связующее входные и выходные сигналы:
![]()
Такие математические модели называются моделями “вход-выход”. В общем случае это воздействие U и m – его производных U’, U’’, …, U(m). Управляющее воздействие f и q – его производных f’, f’’, …, f(q). Выходная величина Y и n – ее производных y’, y’’, …, y(n). Таким образом, получаем уравнение от (n+m+q+3) переменных:
![]()
Обычно, это уравнение нелинейное, но стараются провести линеаризацию и тогда динамика линейных звеньев и систем в общем виде описывается линейным однородным дифференциальным уравнением.
![]() (1)
(1)
Для описания динамики звеньев существуют три основных способа:
линейное дифференциальное уравнение;
с помощью передаточной функции;
с помощью частотных характеристик.
Понятие передаточной функции
Введем
оператор или символ дифференцирования
![]()
![]()
![]() (2)
(2)
Уравнение (1) называется оригиналом, а уравнение (2) – его операторным изображением, аналогично U(t), Y(t) – оригиналы входного и выходного сигналов, а U(p), Y(p) – их операторные изображения. Была доказана связь операторной формы дифференциальных уравнений с методом интегральных преобразований Лапласса и Фурье.
Суть интегрального преобразования состоит в том, что оно преобразует некоторую функцию вещественной переменной f(t), называемую оригиналом в функцию комплексной переменной F(S). Формула интегрального преобразования Лапласса имеет вид:
![]() ,
где
,
где
![]() - комплексный параметр преобразований
Лапласса.
- комплексный параметр преобразований
Лапласса.
Если произвести преобразование Лапласса для уравнения (1), то при нулевых начальных условиях получим следующее:
![]() (3)
(3)
При нулевых начальных условиях операторное изображение уравнения (1) и его изображение по Лаплассу совпадает с точностью до обозначения.
Достоинство метода интегральных преобразований – преобразовываются не только функции (оригинал в изображение), но и операции над ними (дифференцирование – на умножение). В результате дифференциальное уравнение приводится к алгебраическому виду.
Из выражения (2) и (3) можно получить важную характеристику, называемую передаточной функцией:

Передаточной функцией (ПФ) называется отношение операторного изображения выходной величины к входной, полученное при нулевых начальных условия:
![]()
ДОМАШНЕЕ ЗАДАНИЕ: Особенности и свойства преобразований Лапласса.
U(t) U(p)
(t) 1
1(t) 1/p
at 1/p2
………….
Выполнив обратное преобразование Лапласса найдем оригинал:
![]()
Формула преобразования имеет вид:
![]()
Это контурный интеграл на комплексной плоскости. В инженерной практике используют готовые таблицы преобразований Лапласса:
f(t) F(p)
1(t) 1/p
at 1/p2
e-/t 1/(p+)
sin 0t 02/(p2+02)
cos 0t p/(p2+02)
1/(1- e-/t) 1/p(p+)
1/0 e-/tsin 0t 1/(p+)2+02