

1. Пропорциональный регулятор
П-регулятор воздействует на регулирующий орган пропорционально отклонению регулируемого параметра от заданного значения.
П-регулятор, обнаружив рассогласование, перемещает регулирующий орган быстро, но дискретно.
Особенности регулятора:
“+” – быстрое возникновение регулирующего воздействия;
“–” – сохраняются остаточные отклонения, которые зависят от возмущающего воздействия и коэффициента передачи.
Применяется на объектах:
• со средней емкостью;
• небольшим запаздыванием;
• при малых изменениях нагрузки.
2. Пропорционально-дифференциальный регулятор
ПД-регулятор воздействует на регулирующий орган пропорционально отклонению регулируемого параметра от заданного значения и скорости его изменения.
Д-звено, "предсказывает" возможное будущее отклонение регулируемого параметра по скорости его изменения и перемещает регулирующий орган, опережая отклонение.
Применяется на объектах:
• со средней емкостью;
• большим запаздыванием;
• при малых, но быстрых изменениях нагрузки.
Пример 4. В момент времени t = 5 мин поступило задание на изменение темпера-
туры в печи от Т1 = 400 0С до Т2 = 1000 0С.
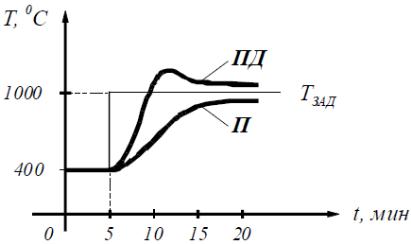
Рис. 1.21. Кривые изменения действительной температуры в печи
при использовании П- и ПД-регуляторов
3. Интегральный регулятор
И-регулятор воздействует на регулирующий орган пропорционально интегралу отклонению регулируемого параметра от заданного значения.
И-регулятор, обнаружив рассогласование, плавно перемещает регулирующий орган, чтобы не проскочить заданное значение регулируемого параметра.
Особенности регулятора:
“+” – отсутствие остаточных отклонений;
“–” – замедленное возникновение регулирующего воздействия.
Применяется на объектах:
• любой емкости с самовыравниванием;
• небольшим запаздыванием;
• при медленных изменениях нагрузки.
4. Пропорционально-интегральный регулятор
ПИ-регулятор первоначально воздействует на регулирующий орган пропорционально отклонению регулируемого параметра от заданного значения, а затем воздействие на регулирующий орган становится пропорционально интегралу остаточного отклонению регулируемого параметра от заданного значения.
П-звено, обнаружив рассогласование, быстро перемещает регулирующий орган, компенсируя значительную часть рассогласования. Затем И-звено постепенно приближает регулируемой параметр к заданному значению.
Применяется на объектах:
• любой емкости с самовыравниванием;
• большим запаздыванием;
• при медленных изменениях нагрузки.
5. Пропорционально-интегрально-дифференциальный регулятор
ПИД-регулятор легко приспособить для автоматизации самых разнообразных технологических процессов путем простого изменения удельного веса П- , И- и Д- составляющих.
ПИД-регулятор можно применять на объектах любой емкости, с любым запаздыванием, при любых изменениях входной нагрузки.
Пример 5. В момент времени t = 5 мин поступило задание на изменение температуры в печи от Т1 = 400 0С до Т2 = 1000 0С.
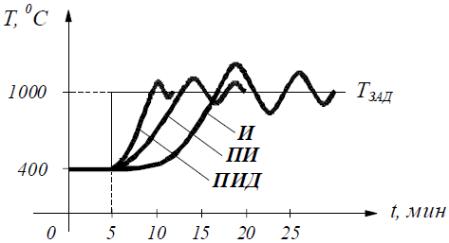
Рис. 1.22. Кривые изменения действительной температуры в печи
при использовании И- , ПИ- и ПИД-регуляторов