

18.9.2 Схема управления шаговым двигателем
Блок управления ШД состоит из нескольких функциональных узлов. Рассмотрим обобщённую функциональную схему ЭП с ШД.
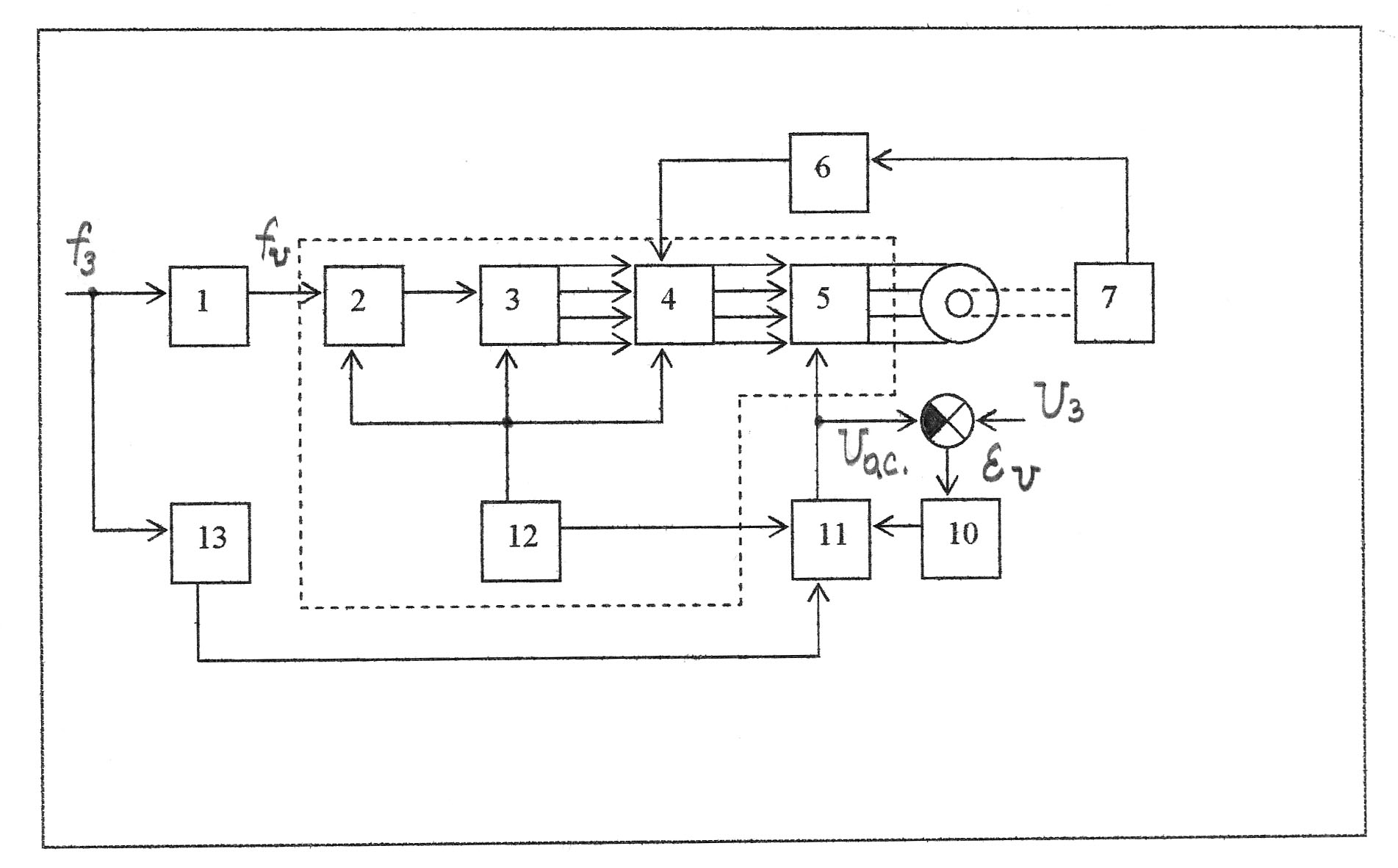
Рисунок 18.21 - Функциональная схема управления дискретным электроприводом
с шаговым электродвигателем
Сигнал управления fu в виде импульсов напряжения поступает на вход блока 2 от программного или другого командного устройства 1. Модулирующий блок 2 видоизменяет эти импульсы, формируя их по длительности и амплитуде, что необходимо для работы других блоков схемы управления. Распределитель импульсов 3 преобразует последовательность сформированных блоком 2 импульсов, например, в четырёхфазную систему однополярных импульсов напряжения, соответствующую количеству фаз (обмоток) двигателя.
С выхода распределителя 3 импульсы усиливаются в усилителе 4 и поступают на коммутатор 5, питающий обмотки ШД. Блоки 2, 3, 4 питаются от источника постоянного тока (выпрямителя) 12. Так обеспечивается пульсирующий ток одного направления в обмотках ШД.
Схема управления электроприводом может быть разомкнутой (обозначена на схеме пунктирной линией) или замкнутой. В разомкнутой системе управления отсутствует датчик положения ШД, но при программировании регулятора электропривода задают начальное положение двигателя. В этом случае предусматривается расчёт положения ШД программно в темпе функционирования электропривода.
Замкнутая схема управления ШД содержит дополнительные узлы: частотно-импульсный регулятор напряжения 11, усилитель обратной связи по току 10, блок электронного дробления шага 13; блок плавного разгона и торможения (регулятор интенсивности) 1; датчик положения ротора и скорости 7 и дискретный регулятор 6. Регулятор напряжения 11 и усилитель 10, связанные с узлом сравнения, предназначены для стабилизации тока в обмотках ШД, что существенно стабилизирует его момент вращения. Стабилизация тока осуществляется введением отрицательной обратной связи по току в обмотках ШД.
Задача стабилизации тока в обмотках ШД может решаться с помощью коммутатора 5, обладающего свойствами источника тока. Тогда отпадает надобность в обратной связи по току и блоках 10, 11.
Функции других узлов таковы: блок 13 уменьшает шаг ШД при низких частотах для уменьшения погрешности отработки входных импульсов управления; блок 1 позволяет существенно расширить диапазон частоты приёмистости ШД примерно в 2÷3 раза.
Применение современных вычислительных средств управления позволило использовать для управления ШД более гибкую и функционально более богатую программную реализацию алгоритма управления.
Область применения дискретного привода постоянно расширяется. Его используют, кроме указанных выше случаев, в газорезательных и сварочных автоматах, часовых механизмах, нажимных устройствах прокатных станов, лентопротяжных и регистрирующих устройствах, в медицинской технике, в производстве элементов микроэлектроники.