

6. Схемы формирования сигналов
Схемы формирования электрических сигналов при наличии элементов–генераторов
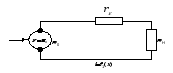
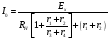
Простейший случай включения элементов-генераторов (Е =var) показан на рис.4. Величина тока в цепи нагрузки
 ,
,
Рис.4
где R0 – внутреннее сопротивление элемента;
 -
суммарное сопротивление соединительных
проводов;
-
суммарное сопротивление соединительных
проводов;
RН- сопротивление нагрузки (приемника);
 .
.
Величина напряжения на нагрузке при этом будет равна:
 ,
,
а выходное напряжение элемента-генератора Ux=Ex – IR0 . Зависимость Ux=f(Ex, I) называется выходной (или нагрузочной) характеристикой элемента генератора.
При
«приемнике напряжения»
 и
и
 .
При «приемнике тока» обычно берется
.
При «приемнике тока» обычно берется
 и
и
 и
и
 .
.
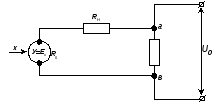
Рис.5
Величина мощности, выделяемой в нагрузке, равна:
 .
.
Наибольшее значение РН отвечает условию RН=R0∑ .
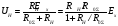
В компенсационной схеме (рис.5) значение тока в нагрузке (приемнике) равно:
 ,
,
где U0 – величина компенсационного напряжения;
rab - сопротивление между точками а и b схемы.
Напряжение на нагрузке RН равно
 .
.
Иногда включают
элемент-генератор в плечо мостовой
схемы (рис.6). Величины сопротивлений

 ,
,
 и
и
 выбирают
так, чтобы
выбирают
так, чтобы
 .
.
При этом ток в диагонали равен:
Рис.6
 .
.
Схемы формирования электрических сигналов при наличии элементов-модуляторов
В общем случае зависимость между током I и падением напряжения Ú на элементе-модуляторе
 , где
, где
 .
.
Здесь Х –
величина внешнего воздействия. Обычно
можно считать, что
 ,
,
где
 .
.
В случае, если
 ,
получим, что
,
получим, что
 не зависит от І и U
будет существовать линейная зависимость:
не зависит от І и U
будет существовать линейная зависимость:
 .
.
Для цепи, состоящей из последовательно включенных элементов модулятора и нагрузки, имеем
 или
или
 ,
,
следовательно,

или
при

 .
.
Для
построения схем формирования сигнала
существенно знать, как будет изменяться
напряжение и ток в цепи или угол сдвига
фаз
 ,
если сопротивление
,
если сопротивление
 (или индуктивность
(или индуктивность
 ,
или емкость
,
или емкость
 )
изменяет свое значение в функции х.
)
изменяет свое значение в функции х.
Имеем для тока в последовательной цепи (рис.7), что
 ,
,
Рис.7
где
 - эквивалентная э. д. с.1
- эквивалентная э. д. с.1
В случае наиболее распространенной мостовой схемы включения (рис.8) справедливы следующие основные управления:
 ,
где
,
где
 ;
;
 ;
;
 ;
;
 ;
;
 ,
,
где Z5 – сопротивление измерительной диагонали;
I5
– ток в измерительной диагонали.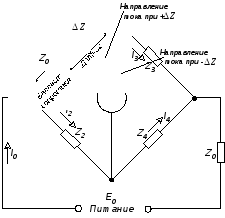
Рис.8
7. Понятия надежности элементов автоматики
Одним из основных параметров элементов и устройств является надежность. Надежностью (Р) называется вероятность исправного выполнения элементом (устройством) его функции при заданных режимах и условиях работы в течении заданного времени.
Отказами в работе элемента (устройства) называют как выход из строя (внезапные отказы), так и изменение его параметров приводящие к резкому возрастанию погрешностей и неудовлетворительному выполнению элементом (устройством) его функций (постепенные отказы )
Рассмотрим
зависимость, определяющие значение
надежности элемента в функции времени
его работ. Положим , что в момент времени
t иметься N работающих
элементов. За время dt
выйдет из строя dN
работающих
элементов. За время dt
выйдет из строя dN элементов.
Можно ожидать, что величина - d
N
элементов.
Можно ожидать, что величина - d
N тем
больше, чем больше число элементов N
тем
больше, чем больше число элементов N и время dt, т.е. - d
N
и время dt, т.е. - d
N =λ
N
=λ
N dt или d
N
dt или d
N /
N
/
N =
- λ dt, где λ –
коэффициент являющийся функцией времени
(λ=f(t)
(называют интенсивностью отказов.))
=
- λ dt, где λ –
коэффициент являющийся функцией времени
(λ=f(t)
(называют интенсивностью отказов.))
На рисунке 9 представлена зависимость интенсивности отказов λ от времени, где tпр – время приработки, tр основное рабочее время.
Интегрируя уравнение
 при t=0,
при t=0,
 получим
получим
 .
.
Вероятность отказа элемента равно: q=1-p.
На рисунке10 представлена зависимость вероятности безотказной работы элемента от времени.

Рис 9
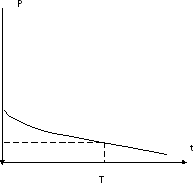
рис.10