

4.12. Моделирование непосредственного взаимодействия машин и механизмов
Для построения модели работы комплекса машин и механизмов необходимо иметь информацию о поведении каждой машины в различных режимах, возникающих вследствие аварийных простоев или изменения внешних условий. Эта информация получается либо путем проведения натурных наблюдений, либо в результате вспомогательного моделирования отдельных процессов.
Моделирование работы комплекса машин и механизмов включает следующие основные этапы:
-
изучение исследуемого процесса с целью получения информации о характере его протекания;
-
формализация процесса, определение совокупности состояний отдельных машин и механизмов, формулировка условий переходов из состояния в состояние;
-
выбор совокупности параметров, характеризующих процесс функционирования;
-
разработка алгоритмов, моделирующих процесс функционирования комплекса;
-
программирование, отладка и реализация алгоритма на ЭВМ;
-
обработка и анализ результатов моделирования.
Для
получения информации о работе каждого
механизма проводят статистические
наблюдения. При этом функционирование
каждой
машины представляет собой чередование
времени работы
![]() и ремонта
и ремонта
![]() (рис. 2а). На основании статистических
наблюдений
строят функции плотности распределения
вероятностей пребывания
механизма в состоянии работы и ремонта
(рис. 2б и
в).
(рис. 2а). На основании статистических
наблюдений
строят функции плотности распределения
вероятностей пребывания
механизма в состоянии работы и ремонта
(рис. 2б и
в).
Зная подобные характеристики для каждого элемента схемы, формализуют процесс функционирования схемы. Для этого строят матрицу возможных состояний, граф переходов и матрицу переходов.
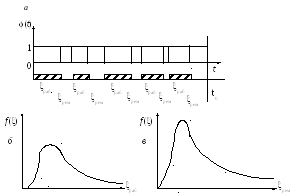
Рис. 2. График работы оборудования (а) и кривые плотности распределения времени (б) и ремонта оборудования (в).
Рассмотрим процесс непосредственного взаимодействия двух элементов. Каждый элемент может находиться в рабочем состоянии (1) или ремонте (0). Возможные состояния системы элементов приведены в табл.1.
Таблица 1
-
Состояние
Номер
состояния
первого
элемента
второго
элемента
системы
1
1
0
1
0
1
1
0
0
1
2
3
Очевидно, что одновременно оба элемента в состоянии ремонта находиться не могут. При поломке одного элемента другой останавливается и находится в состоянии ожидания окончания ремонта вышедшего из строя элемента.
Возможные траектории блуждания системы иллюстрируются графом смены состояний (рис. 3). Условия перехода из одного состояния в другое для рассматриваемой системы сведены в табл.2.
Таблица 2
-
Состояние
Условия перехода из состояния в состояние
1
2
3
1
2
3
-
Безусловный
То же
-
Нет

Нет
-
На
основании графа смены состояний
и условий перехода разрабатываем
алгоритм статистического моделирования
процесса, реализуя который
на ЭВМ, получаем вероятностные
характеристики
функционирования
схемы. Для случая н епосредственного
взаимодействия необходимо
определить время эффективной работы и
ремонта, схемы и
функции плотности их распределения
епосредственного
взаимодействия необходимо
определить время эффективной работы и
ремонта, схемы и
функции плотности их распределения
![]() и
и
![]() .
.
Рис. 3. Граф смены состояний.
Далее, перейдем к рассмотрению современных программных систем, позволяющих решать задачи различной степени сложности, в том числе и задачи моделирования поведения и состояния сложных объектов, к которым относится горнодобывающее производство.
5. Экспертные системы
5.1. Назначение и специфика экспертных систем
Считается, что ЭС оформились в качестве самостоятельного научного направления в начале 80-х годов. К этому времени в ИИ наибольшую популярность приобрели роботы, с которыми ассоциировались самые яркие перспективы. Занятия интеллектуальными роботами породили такие термины, как "представление знаний" (фреймы, сценарии и т.п.), "инженерия знаний" - создание общей картины, исходя сразу из нескольких источников знаний (глаза, уши, осязание, запасенная информация, модель мира и т.п.). При моделировании действий робота и общения с роботом на естественном языке Т.Виноградом была впервые продемонстрирована возможность построения компонента объяснения системой своих действий.
Роботы привлекали тем, что они обеспечивали ограниченный канал связи с внешним миром, достаточный, чтобы возникали новые интересные постановки задач (проблема фрейма, конфликтные цели), но не слишком широкий, что позволило воспользоваться уже наработанным в искусственном интеллекте багажом методов, а не начинать все с самого начала.
Однако и здесь подстерегали свои трудности, хотя было разработано несколько типов роботов в США, Великобритании, Японии, а в США был даже утвержден "типовой робот" для проведения научно-исследовательских работ. Тем не менее, возникло много препятствий для дальнейшего развития исследований в этой области.