

ОАУ-ЦЫБРИЙ
.pdf
|
|
WR(p) |
|
|
|
|
|
|
|
|
|
|
|
|
W||ку(p) |
|
|
z(p) |
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
x(p) (p) |
|
|
|
|
|
u(p) |
|
|
y(p) |
|
|
|
|
|
|
|
|
||||
W1(p) |
|
|
W2(p) |
|
Wоу(p) |
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 7.3 - Структурная схема системы с параллельным корректирующим устройством
Коррекция систем управления с помощью параллельного корректирующего устройства эффективна, когда требуется формировать сложные законы управления с введением производных и интегралов от сигнала ошибки. Примером этому могут служить рассмотренные ранее типовые регуляторы.
Корректирующие обратные связи вводятся в цепь регулятора и охватывают какие-либо его звенья. Они могут быть положительными (ПОС) и отрицательными (ООС), кроме того - жесткими и гибкими.
На рисунке 7.4 представлена структурная схема системы с корректирующей обратной связью. Здесь W1(p), W2(p) представляют собой передаточные функции заданных частей регулятора, WОС(p) - передаточная функция корректирующей обратной связи, WОУ(p) - передаточная функция объекта управления.
|
|
WR(p) |
|
|
|
|
|
|
|
|
|
|
|
|
Wос(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z(p) |
||
x(p) (p) |
|
|
|
|
|
u(p) |
|
|
y(p) |
|
|
|
|
|
|
|
|
||||
W1(p) |
|
|
W2(p) |
|
Wоу(p) |
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 7.4 - Структурная схема системы с корректирующей обратной связью
Передаточная функция регулятора с корректирующей обратной
111

связью: WR |
(p) = W1(p) |
|
|
W2 (p) |
|
, |
|
m |
|
|
|||
|
1 |
|
W2 (p)Wос(p) |
|||
Коррекция местной |
обратной |
связью используется в системах |
||||
автоматического управления наиболее часто. Корректирующая обратная связь образует в системе внутренний контур помимо контура, образуемого главной обратной связью. В подавляющем большинстве случаев используются отрицательные корректирующие обратные связи, однако могут применяться также и положительные обратные связи, например в комбинированных системах с компенсацией динамических ошибок.
Отрицательная корректирующая обратная связь позволяет существенно ослаблять влияние изменения параметров элементов и их нелинейностей, входящих в местный контур. Поэтому местной обратной связью желательно охватывать те элементы корректируемой системы, которые в процессе работы могут изменять свои параметры и имеют высокие значения коэффициентов передачи.
Основными видами корректирующих обратных связей являются: - жесткая обратная связь WОС(p) = kОС;
- инерционная жесткая обратная связь WОС(p) = |
|
kос |
|
; |
|||||
T |
|
|
|||||||
|
|
|
|
|
p + 1 |
|
|||
|
|
|
|
ос |
|
|
|
|
|
- гибкая обратная связь WОС(p) = kОС p; |
|
|
|
|
|
||||
- инерционная гибкая обратная связь WОС(p) = |
|
kос p |
|
||||||
|
|
. |
|
||||||
T |
p + 1 |
|
|||||||
|
|
|
|
ос |
|
|
|
|
|
Жесткая обратная связь может выполнять следующие функции. |
|||||||||
При охвате безынерционного звена с передаточной функцией |
|||||||||
WОХВ(р) = k эквивалентная передаточная функция будет равна: |
|||||||||
Wэкв(p=) |
m k =kэ,где kЭ- |
эквивалентный |
|
коэффициент |
|||||
1 |
kkос |
|
|
|
|
|
|
|
|
передачи. |
|
|
|
|
|
|
|
|
|
При отрицательной ОС kЭ < k |
; при положительной ОС kЭ > k. |
||||||||
Если при положительной ОС kkОС = 1, то kЭ→∞. Такой элемент представляет собой реле.
Следовательно, положительная обратная связь может служить для увеличения коэффициента передачи.
112

При охвате апериодического звена первого порядка с передаточной функцией
k
Wохв(p) = |
|
|
эквивалентная |
передаточная |
функция |
будет |
|||||||||
Tр + 1 |
|||||||||||||||
|
W |
(p) = |
k/(Tp +1) |
= |
|
k |
= |
kэ |
|
|
|
||||
равна: |
|
|
|
|
Tэ p+1, |
|
|||||||||
экв |
|
|
1 m kkос/(Tp +1) (Tp +1) m kkос |
|
|
||||||||||
где |
kЭ |
- |
эквивалентный коэффициент передачи; |
|
|||||||||||
|
|
TЭ |
- |
эквивалентная постоянная времени. |
|
|
|
||||||||
Следовательно, |
отрицательная |
жесткая |
обратная |
связь |
|||||||||||
уменьшает инерционность звена. Тем самым она оказывает стабилизирующее действие и улучшает качество переходного процесса в системе. Уменьшение же коэффициента передачи может быть скомпенсировано за счет других звеньев системы.
Положительная жесткая обратная связь может служить для увеличения коэффициента передачи. Но одновременно с этим увеличивается и постоянная времени, т.е. инерционность звена, а при
kkОС > 1 звено становится неустойчивым. |
|
|||||||||
При |
охвате |
интегрирующего |
звена с |
передаточной функцией |
||||||
|
k |
|
|
|
|
|
|
|
||
Wохв(p) = |
|
, эквивалентная передаточная функция будет равна: |
||||||||
p |
||||||||||
W |
(p) = |
|
k/p |
= |
k |
= |
k э |
|
||
|
|
|
|
|
, |
|||||
экв |
|
1 m kkос / p |
s m kkос |
|
Tэp m 1 |
|||||
где kЭ - эквивалентный коэффициент передачи; TЭ - эквивалентная постоянная времени.
Следовательно, под действием отрицательной жесткой обратной связи интегрирующее звено превращается в апериодическое с коэффициентом передачи целиком определяемым обратной связью. Такую связь необходимо использовать в тех случаях, когда требуется понизить степень астатизма, т.е. исключить в системе влияние интегрирующего звена. При положительной ОС звено теряет устойчивость.
kос
Инерционная жесткая обратная связь WОС(p) = Tосp+1 может
113

выполнять следующие функции.
При охвате ею безынерционного звена WОХВ(p) = k получаем
|
|
|
k |
|
k(T p +1) |
|
k |
(T p +1) |
||
|
|
|
= |
ос |
|
|
э |
ос |
|
|
W |
(p) = |
|
|
= |
|
|||||
|
|
|
|
Tэ p+1 , |
||||||
экв |
|
1 m kkос/(Tосp +1) |
(Tосp +1) m kkос |
|
|
|||||
где |
kЭ |
- |
эквивалентный коэффициент передачи; |
|||||||
|
TЭ |
- |
эквивалентная постоянная времени. |
|
|
|||||
Следовательно, при отрицательной ОС |
безынерционное звено |
|||||||||
превращается в интегро-дифференцирующее звено. Инерционное запаздывание в обратной связи (в отличие от такового в прямой цепи) целесообразно использовать для улучшения качества переходных процессов, получая эффект, аналогичный введению производной в прямой цепи. Отсюда вытекает и хорошее влияние инерционной жесткой обратной связи на качество переходного процесса в системе в целом.
Положительная инерционная жесткая обратная связь обычно не используется.
Гибкая обратная связь может выполнять следующие функции.
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
||
|
При охвате апериодического звена |
W |
(p) = |
|
|
|
|
||||||||
|
Tp+1 |
|
|||||||||||||
|
|
|
|
|
|
|
охв |
|
|
|
|||||
первого порядка получаем выражение: |
|
|
|
|
|
|
|
|
|
||||||
W |
(p) = |
|
|
k/(Tp + 1) |
= |
k |
|
|
|
= |
|
k э |
|
|
|
|
|
|
|
|
|
|
Tэ p+1 |
, |
|||||||
экв |
1 m kkос p /(T p + 1) |
(T p + 1) m kkос p |
|
||||||||||||
|
где kЭ |
- |
эквивалентный коэффициент передачи; |
|
|||||||||||
|
TЭ |
- |
эквивалентная постоянная времени. |
|
|||||||||||
|
При отрицательной ОС |
kЭ = k |
и |
TЭ |
= T + kkОС, если ОС |
||||||||||
положительная, то kЭ = k и TЭ = T − kkОС.
Таким образом, гибкая обратная связь изменяет только инерционность звена, причем для отрицательной ОС эквивалентная постоянная времени увеличивается.
Инерционная гибкая обратная связь может выполнять следующие функции.
k
При охвате ею интегрирующего звена Wохв(p)= p получаем:
114

|
|
k/p |
|
k(T p +1) |
|
k (T |
p +1) |
||
W |
(p) = |
= |
ос |
= |
э ос |
|
, |
||
|
|
||||||||
|
|
|
|
|
|||||
экв |
|
1 m kkос/(Tос p +1) |
p[(Tос p +1) m kkос] |
|
p(Tэ p+1) |
||||
где kЭ - эквивалентный коэффициент передачи; TЭ - эквивалентная постоянная времени.
Следовательно, охват интегрирующего звена инерционной гибкой обратной связью эквивалентен последовательному включению интегро-дифференцирующего звена. При отрицательной инерционной гибкой обратной связи и большом коэффициенте передачи k интегрирующее звено приближенно становится изодромным.
Способ коррекции обратной связью позволяет наилучшим образом скорректировать динамические свойства системы по сравнению со способами коррекции с помощью последовательных и параллельных корректирующих устройств.
7.4 Частотный метод синтеза корректирующих цепей
Рассмотрим объект управления, поведение которого описывается передаточной функцией Wоу (p), а выходная переменная измеряется с
помехой h(t). Влияние окружающей среды отражает возмущение M(t). Требования к поведению системы задаются в виде оценок переходного процесса, в качестве которых используются статическая
ошибка ( ), перерегулирование и быстродействие (δ % и t ).
Необходимо определить передаточную функцию корректирующего звена (регулятора) Wk (p), включение которой в систему обеспечит заданное качество работы.
Частотный метод предназначен для синтеза одноканальных систем, работающих в режиме слежения, и предполагает использование асимптотических ЛАЧХ. При этом расчетная структурная схема имеет вид:
M
x 
 Wk (p)
Wk (p)  Woc (p)
Woc (p) 

 y
y
h
Рисунок 7.5 - Структурная схема замкнутой системы
115

Первоначально будем рассматривать реакцию только на входное воздействие, полагая возмущение и помеху равными нулю (M = 0, h = 0). Их влияние на свойства системы учтем в дальнейшем.
Вычислим передаточную функцию разомкнутой системы,
Wp ( p ) W k ( p ) W0 ( p ) ,
азатем замкнутой:
W(p)= |
W (p) |
|
p |
. |
|
1+ Wp (p) |
||
Как видим, ее однозначно определяет Wp (p).
Следовательно, если удастся сформировать заданную передаточную функцию или частотную характеристику разомкнутой системы, то тем самым можно обеспечить требуемые свойства для замкнутой системы.
Частотная характеристика разомкнутой системы:
Wp ( jω) Wk ( jω)W0 ( jω),
Рассмотрим полученную характеристику в различных областях частот.
Зоной низких частот называется область изменения ω 0 . В ней по условию статики выполняется соотношение:
W0 (0) k0 > 1,
где k |
0 |
- коэффициент усиления объекта. Для разомкнутой |
|
|
системы
Wp ( jω) > 1.
Областью высоких частот называется совокупность частот
ω. Здесь справедливы соотношения:
W0 ( jω) 0, Wp ( jω) 0.
Зона средних частот - это область изменения ω , где выполняются соотношения:
W0 ( jω) 1, Wp ( jω) 1.
Частотная характеристика в области низких частот также равна
Wp ( jω)
W( jω)= + ≈ 1, 1 Wp ( jω)
то есть вид частотной характеристики разомкнутой системы мало влияет на систему в целом.
116

В области высоких частот имеем:
Wp ( jω)
W( jω)= + ≈ 0, 1 Wp ( jω)
а значит вид частотной характеристики разомкнутой системы не влияет на свойства замкнутой.
Таким образом, наибольшее влияние Wp ( jω) оказывает на
свойства замкнутой системы в области средних частот, где наиболее тщательно следует выбирать желаемую характеристику.
Частотную характеристику разомкнутой системы представим в форме
Wp ( jω)= Ap (ω)l j (ω).
Отсюда следует соотношение для амплитудных частотных характеристик
Ap (ω) Ak (ω)A0 (ω),
которое в логарифмическом масштабе принимает вид
Lp (ω) Lk (ω) L0 (ω).
Формируя желаемым образом характеристику разомкнутой системы L* (p) , получаем
L* (ω) Lk (ω) L0 (ω).
Из этого уравнения получим расчетное соотношение для логарифмической характеристики корректирующего звена,
Lk (ω) L* (ω) - L0 (ω).
являющееся основным в частотном методе синтеза Таким образом, расчет корректирующего звена состоит из
следующих этапов:
-Построение асимптотической ЛАЧХ объекта L0 (ω) .
-Формирование желаемой ЛАЧХ разомкнутой системы L* (ω) по
требованиям к качеству замкнутой.
- Определение ЛАЧХ корректирующего звена и восстановление на основе Lk (ω) передаточной функции Wk (p) .
- Оценка влияния помехи и возмущающего воздействия. Обычно объект управления представляет собой
последовательную цепочку типовых звеньев, поэтому L0 (ω) можно
117
построить, суммируя ЛАЧХ отдельных звеньев.
Такое суммирование позволяет предложить следующую процедуру построения L0 (ω) :
- На частоте ω 1 фиксируется точка с амплитудой 20 lg k0 .
-Отмечаются частоты сопряжения ωi = Ti −1.
-До первой частоты сопряжения строится НЧ асимптота с наклоном -20r дец/дек, если передаточная функция объекта содержит интегрирующие звенья, а r - число таких звеньев. Наклон будет равен
+20l дец/дек, если W0 ( p) содержит дифференцирующие звенья, l - число таких звеньев.
НЧ асимптота или ее продолжение должна пересекать точку 20
lg k0 .
- На частоте сопряжения происходит излом асимптотической ЛАЧХ объекта. Он будет равен -20r дец/дек, если соответствующая постоянная времени находится в знаменателе передаточной функции объекта, r - число таких звеньев.
Наклон будет равен +20l дец/дек, если постоянная времени находится в числителе передаточной функции, l - число таких звеньев. Асимптота проводится до следующей частоты сопряжения, где также происходит ее излом.
L
-20
20
10 20lgk0
-40
-1=lg ω 1 |
0 |
1 |
lg ω |
-10 -60
L0 (ω)
Риcунок 7.6 - Асимптотическая ЛАЧХ объекта
Например, необходимо построить асимптотическую ЛАЧХ объекта, передаточная функция которого имеет вид:
118

W0 (p)= |
|
k 0 |
|
p(T p+ 1)(T p+ 1) |
, |
||
1 |
2 |
|
|
где коэффициент усиления k0 = 10, а постоянные времени T1 = 10c, T2 = 1c.
При построении ЛАЧХ воспользуемся предложенной процедурой. С этой целью определим характерные точки:
20 lg k0 = 20 дБ ; lg ω 1 = lg 1/T1 = lg 0,1 = -1 дек;
lg ω 2 = lg 1/T2 = lg 1 = 0 ,
которые откладываются на осях координат (рисунок 7.6).
Если передаточная функция объекта представлена выражением
общего вида, |
W0 (p) |
B(p) / A(p) , |
то следует перейти |
к частотной |
характеристике W0 ( jω) |
B( jω) / A( jω). Для построения ЛАЧХ объекта |
|||
используем |
выражение A0 (ω) |
AB (ω) / AA (ω), что |
позволяет |
|
определить L0 ( ω) в виде
L0 (ω) LB (ω) LA (ω),
то есть ЛАЧХ объекта находится как разность ЛАЧХ его числителя и знаменателя.
Желаемая ЛАЧХ строится по требованиям к качеству работы замкнутой системы в статике и динамике.
Предварительно из условия заданной статической ошибки выбирается коэффициент усиления разомкнутой системы k, равный произведению коэффициентов усиления объекта и регулятора
kp k0 kk .
Поскольку статическая ошибка, в основном, определяется возмущением, рассмотрим эту составляющую для статической
системы: |
|
|
|
|
|
0= |
1 |
M. |
|
|
|
|
||
M |
1+ k0 k k |
|||
При заданной ошибке *0= δ*MH расчетное соотношение для kp
1
принимает вид: + ≤ δ . 1 kp *
При синтезе систем частотным методом удобно выровнять ЛАЧХ объекта и ЛАЧХ разомкнутой системы, полагая что на этапе расчета kk 1, а найденный коэффициент усиления отнесен к объекту,
119
k0 kp , и учтен при построении L0 (ω) .
L
-20 дБ/дек
ωcр |
lg ω |
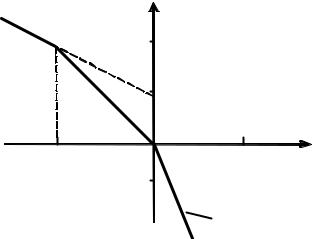
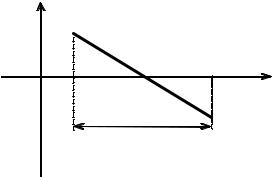
Наибольшее влияние на свойства замкнутой системы оказывает среднечастотная асимптота желаемой ЛАЧХ, которую выбирают по условиям динамики (рисунок
7.7).
l |
|
|
Для |
того, |
чтобы |
|
обеспечить |
требуемые |
|||||
|
|
|
||||
|
|
|
свойства, ее |
наклон |
всегда |
|
Риcунок 7.7 – Среднечастотная |
должен быть равен -20 дб/дек. |
|||||
ЛАЧХ |
Частота |
среза |
ωс в |
|||
|
|
|
||||
данном методе играет роль граничной частоты полосы пропускания (в
этой |
точке |
амплитуда |
выходного |
||
сигнала становится |
равной |
единице) |
и выбирается |
по заданному |
|
быстродействию |
замкнутой системы. |
|
|
||
Соотношение |
между |
t n и ωc |
устанавливают |
номограммы, |
|
приводимые в справочной литературе. Для предварительных расчетов можно пользоваться формулой:
ω =с |
k π |
, где k = 2 4 |
||
t |
n |
|||
|
|
|||
|
|
|
||
Длина среднечастотного участка желаемой ЛАЧХ решающим образом определяет динамику и ограничивается запасом устойчивости по модулю L , который откладывается вверх и вниз по оси ординат. В свою очередь, L находится по номограммам в зависимости от
требуемого перерегулирования σ %* .
Приближенно длину среднечастотного участка можно выбирать следующим образом: l = (1 1,5) декады, вправо и влево от ωс длина асимптоты примерно 0,5l. В этом случае будет обеспечено перерегулирование σ % (20 30)% .
Поскольку k k отнесен к объекту, то в области низких частот желаемая ЛАЧХ должна совпадать с ЛАЧХ объекта; в области высоких частот эти две характеристики могут совпадать или быть параллельными. Таким образом, остается выбрать только участки сопряжения желаемой ЛАЧХ. Их следует проводить под наклоном -40
120