

Курсовая Кинематика сложног движения точки
.docx-
Кинематика сложного движения точки.
С исследованием движения точки мы уже ознакомились при изучении раздела “Кинематика точки”. Тогда предполагалось, что точка движется по заданному закону относительно неподвижного тела (или относительно неподвижной системы отсчета).
Сложное движение точки (тела) – такое движение, при котором точка (тело) одновременно участвует в нескольких движениях (напр. пассажир, перемещающийся по движущемуся вагону). В этом случае вводится подвижная система координат (Oxyz), которая совершает заданное движение относительно неподвижной (основной) системы координат (O1x1y1z1). Абсолютное - движение относительно неподвижной системы отсчета. Относительное - движение точки отн подвижной системы отсчета. Переносное - движение подвижной системы отсчета по отношению к неподвижной системе отсчета.
Сложное движение точки.
Относительное, переносное и абсолютное движения.
До сих пор мы изучали движение точки или тела по отношению к одной заданной системе отсчета. Однако в ряде случаев при решении задач механики оказывается целесообразным (а иногда и необходимым) рассматривать движение точки (или тела) одновременно по отношению к двум системам отсчета, из которых одна считается основной или условно неподвижной, а другая определенным образом движется по отношению к первой. Движение, совершаемое при этом точкой (или телом), называют составным или сложным. Например, шар, катящийся по палубе движущегося парохода, можно считать совершающим по отношению к берегу сложное движение, состоящее из качения по отношению к палубе (подвижная система отсчета), и движение вместе с палубой парохода по отношению к берегу (неподвижная система отсчета). Таким путем сложное движение шара разлагается на два более простых и более легко исследуемых.
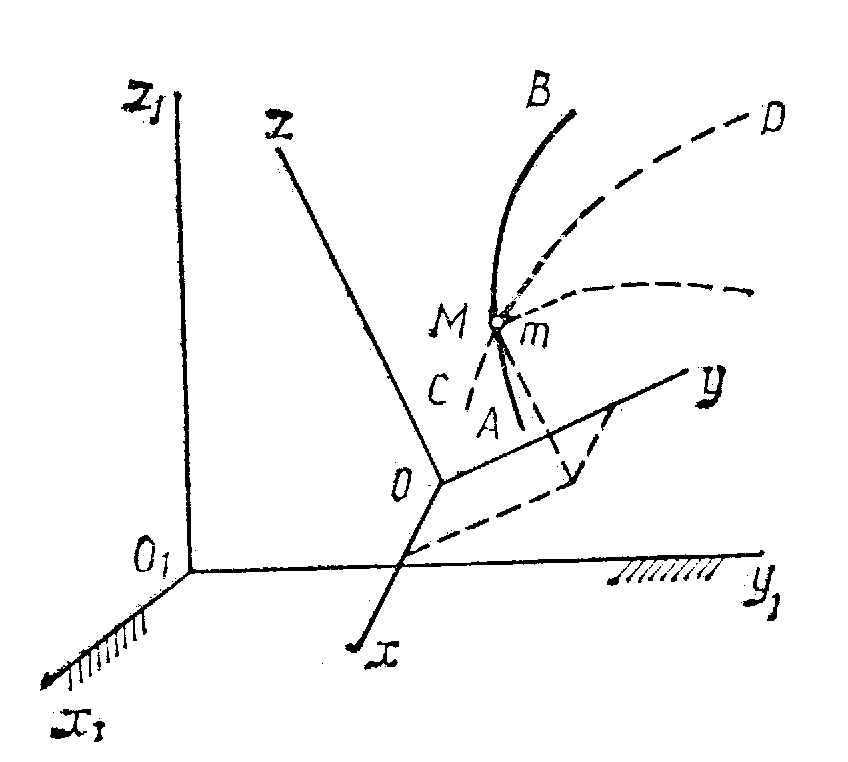
Рис.48
Рассмотрим
точку М, движущуюся по отношению к
подвижно системе отсчета Oxyz,
которая в свою очередь как-то движется
относительно другой системы отсчета
![]() ,
которую называем основной или условно
неподвижной (рис. 48). Каждая из этих
систем отсчета связана, конечно, с
определенным телом, на чертеже не
показанным. Введем следующие
определения.
,
которую называем основной или условно
неподвижной (рис. 48). Каждая из этих
систем отсчета связана, конечно, с
определенным телом, на чертеже не
показанным. Введем следующие
определения.
1.
Движение, совершаемое точкой М по
отношению к подвижной системе отсчета
(к осям Oxyz),
называется относительным движением
(такое движение будет видеть наблюдатель,
связанный с этими осями и перемещающийся
вместе с ними). Траектория АВ, описываемая
точкой в относительном движении,
называется относительной траекторией.
Скорость точки М по отношению к осям
Oxyz
называется относительной скоростью
(обозначается
![]() ),
a
ускорение - относительным ускорением
(обозначается
),
a
ускорение - относительным ускорением
(обозначается
![]() ).
Из определения следует, что при вычислении
).
Из определения следует, что при вычислении
![]() и
и
![]() можно
движение осей Oxyz во внимание не принимать
(рассматривать их как неподвижные).
можно
движение осей Oxyz во внимание не принимать
(рассматривать их как неподвижные).
2.
Движение, совершаемое подвижной системой
отсчета Oxyz (и всеми неизменно связанными
с нею точками пространства) по отношению
к неподвижной системе
![]() ,
является для точки М переносным
движением.
,
является для точки М переносным
движением.
Скорость
той неизменно связанной с подвижными
осями Oxyz точки m, с которой в данный
момент времени совпадает движущаяся
точка М, называется переносной скоростью
точки М в этот момент (обозначается
![]() ),
а ускорение этой точки m
- переносным ускорением точки М
(обозначается
),
а ускорение этой точки m
- переносным ускорением точки М
(обозначается
![]() ).
Таким образом,
).
Таким образом,
![]() .
.
Если представить себе, что относительное движение точки происходит по поверхности (или внутри) твердого тела, с которым жестко связаны подвижные оси Oxyz, то переносной скоростью (или ускорением) точки М в данный момент времени будет скорость (или ускорение) той точки т тела, с которой в этот момент совпадает точка М.
3.
Движение, совершаемое точкой по отношению
к неподвижной системе отсчета
![]() ,
называется абсолютным или сложным.
Траектория CD
этого движения называется абсолютной
траекторией, скорость - абсолютной
скоростью (обозначается
,
называется абсолютным или сложным.
Траектория CD
этого движения называется абсолютной
траекторией, скорость - абсолютной
скоростью (обозначается
![]() )
и ускорение - абсолютным ускорением
(обозначается
)
и ускорение - абсолютным ускорением
(обозначается
![]() ).
).
В приведенном выше примере движение шара относительно палубы парохода будет относительным, а скорость - относительной скоростью шара; движение парохода по отношению к берегу будет для шара переносным движением, а скорость той точки палубы, которой в данный момент времени касается шар будет в этот момент его переносной скоростью; наконец, движение шара по отношению к берегу будет его абсолютным движением, а скорость - абсолютной скоростью шара.
При исследовании сложного движения точки полезно применять «Правило остановки». Для того, чтобы неподвижный наблюдатель увидел относительное движение точки, надо остановить переносное движение.
Тогда будет происходить только относительное движение. Относительное движение станет абсолютным. И наоборот, если остановить относительное движение, переносное станет абсолютным и неподвижный наблюдатель увидит только это переносное движение.
В последнем случае, при определении переносного движения точки, обнаруживается одно очень важное обстоятельство. Переносное движение точки зависит от того в какой момент будет остановлено относительное движение, от того, где точка находится на среде в этот момент. Так как, вообще говоря, все точки среды движутся по-разному. Поэтому логичнее определять переносное движение точки как абсолютное движение той точки среды, с которой совпадает в данный момент движущаяся точка.
Если же точка движется по заданному закону относительно тела, а тело, в свою очередь, перемещается относительно неподвижной системы отсчета, то движение точки относительно неподвижной системы отсчета называется сложным или составным: оно складывается из движения точки по телу и движения вместе с этим телом.
Например, мяч, катящийся по палубе плывущего вдоль берега теплохода, совершает относительно берега сложное движение, которое состоит из качения по палубе и движения вместе с палубой (теплоходом). Сложное движение относительно платформы совершает человек, идущий внутри вагона движущегося поезда. Шарик, вылетающий из вращающейся трубки, совершает сложное движение относительно неподвижной стойки. Под стойкой здесь и в дальнейшем понимается некоторое неподвижное основание.
Рассмотрим движение точки М (рис. 65) по траектории 1–1 внутри тела А, которое, в свою очередь, движется относительно неподвижного тела В (стойки). Движение точки М по отношению к телу В есть сложное движение.
Система координатных осей О1х1у1z1, связанная с движущимся телом А, называется подвижной системой

Рис. 65
Система осей Охуz, связанная с неподвижным телом В (стойкой), называется неподвижной системой отсчета.
Движение
точки M
относительно
тела A
(или относительно О1х1у1z1)
по траектории 1–1 называется относительным
движением точки М.
Скорость и ускорение точки М
в
этом движении есть относительная
скорость и относительное ускорение
точки М,
их обозначают
![]() и
и
![]() соответственно.
соответственно.
Движение тела А (или системы О1х1у1z1) относительно стойки (относительно Охуz) называется переносным движением. Переносной скоростью (ускорением) точки М называется скорость (ускорение) точки тела А, с которой в данный момент совпадает движущаяся по телу точка М. Поясним это определение.
В
каждый момент времени точка М
совпадает с некоторой точкой М'
тела А
(рис. 66). Скорость (ускорение) точки М'
и есть переносная скорость (ускорение)
точки М.
Переносную скорость и переносное
ускорение обозначают
![]() и
и
![]() .
.
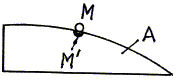
Рис. 66
Движение
точки М
(рис. 65) относительно стойки (или
относительно Охуz)
называется абсолютным движением точки
М.
Скорость и ускорение точки в этом
движении есть абсолютная скорость и
абсолютное ускорение точки М,
их обозначают
![]() и
и
![]() .
.
Обратите внимание на взаимную связь относительного и переносного движений: относительное движение – движение точки по перемещающемуся телу, движение же этого тела – переносное движение. Обратите также внимание на различие в определениях относительного и абсолютного движений, хотя эти определения формально очень похожи.
Важной операцией исследования кинематики сложного движения является выделение относительного, переносного и абсолютного движений в конкретном случае сложного движения точки. Эту операцию будем называть анализом сложного движения точки. Анализ выполняется в соответствии с установленными выше определениями относительного, переносного и абсолютного движений. Для рассмотренного выше случая (см. рис. 65) результат анализа будет таким:
- относительное движение – движение точки М по телу А;
- переносное движение – движение тела А относительно тела В (относительно стойки);
- абсолютное движение – движение точки М относительно тела В (относительно стойки).
При анализе сложного движения точки надо иметь в виду, что объектом относительного и абсолютного движений является одна и та же точка; объектом же переносного движения является тело, по которому точка совершает относительное движение. Из-за наличия взаимной связи относительного и переносного движений их выделение происходит всегда одновременно: если Вы указали относительное движение точки по перемещающемуся телу, то перемещение этого тела следует назвать переносным движением.
Рассмотрим выполнение анализа сложного движения точки на конкретных примерах.
Пример 37. Мостовой кран АВ (рис. 67) перемещается вдоль цеха, изображенного на рисунке прямоугольником ОСDE. По крану движется тележка М. Требуется выполнить анализ сложного движения тележки.

Рис. 67
Начнем с выделения относительного движения, учитывая, что это движение точки по перемещающемуся телу. В данном примере относительное движение – движение тележки М (точки М) по крану.
После того как относительное движение названо, становится очевидным, что переносное движение – движение крана АВ вдоль цеха OCDE.
В завершение укажем абсолютное движение. По определению – это движение точки относительно стойки (неподвижной системы отсчета). В рассматриваемом примере абсолютное движение – движение тележки относительно цеха OCDE.
Пример 38. По трубке, изогнутой в форме окружности, непрерывно течет жидкость. Трубка, в свою очередь, вращается вокруг оси О, перпендикулярной стойке (рис. 68). Требуется выполнить анализ сложного движения частицы М жидкости.
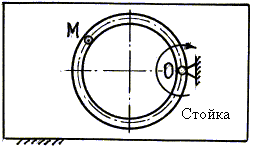
Рис.68
Относительным движением или движением точки по перемещающемуся телу здесь будет движение частицы М по трубке. Переносное движение – вращение трубки вокруг оси О стойки. Абсолютное движение – движение частицы М относительно стойки.
Возвращаясь к условию двух приведенных примеров, отметим, что относительное и переносное движения в них были, по существу, заданы: была известна траектория относительного движения (прямая – в первом примере, окружность – во втором). Так же был определен и вид переносного движения (в первом примере – поступательное движение крана, во втором – вращение трубки вокруг оси). Траектория же абсолютного движения точки в этих примерах не определялась, так как предполагалось, что все параметры абсолютного движения могут быть найдены по заданным параметрам относительного и переносного движений.
Значительная часть задач на сложное движение точки имеет иной характер: условием задачи определяется траектория абсолютного движения точки, а параметры относительного или переносного движения требуется найти. Такие задачи можно считать обратными по отношению к задачам, рассмотренным в первых примерах.
Приведем примеры обратных задач.
Пример 39. На неподвижную проволочную окружность надето колечко М (рис. 69), через него проходит стержень ОА, вращающийся вокруг оси О, перпендикулярной стойке. Требуется выполнить анализ сложного движения колечка М.
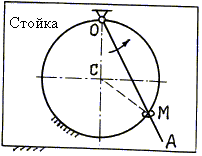
Рис. 69
Абсолютное движение или движение точки относительно неподвижного тела в этом примере отчетливо видно: это движение колечка М по проволочной окружности, расположенной на стойке. Относительное движение или движение точки по перемещающемуся телу здесь – скольжение колечка М по стержню ОА, а переносное движение – вращение стержня ОА вокруг оси О стойки.
Пример 40. Кулачок А (рис. 70), перемещаясь по горизонтальной плоскости вдоль оси х, приводит в движение толкатель ВМ, скользящий в вертикальных направляющих. Требуется выполнить анализ сложного движения точки М толкателя. Точка М толкателя движется относительно неподвижной плоскости (стойки) по вертикали. Это, очевидно, абсолютное движение точки М.
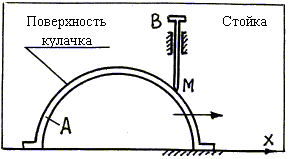
Рис. 70
Можно заметить также, что точка М толкателя скользит по поверхности движущегося кулачка. Это знакомое нам сочетание относительного и переносного движений: относительное – движение точки М по поверхности кулачка, переносное – движение кулачка.
Выполнить разделение движений в подобных задачах будет значительно проще, если в месте контакта звеньев поместить дополнительное тело пренебрежимо малых размеров. Это точечное тело должно проскальзывать по одному звену и в то же время совпадать с точкой контакта второго звена. Таким дополнительным телом может быть колечко, ползун, шарик. Дополнительное тело можно считать точкой, совершающей сложное движение.
В условиях примера 40 поместим в точке контакта кулачка и толкателя шарик М (рис. 71).
При движении кулачка вдоль оси х (переносное движение) шарик М будет перекатываться по поверхности кулачка (относительное движение шарика) и подниматься вверх вместе с толкателем (абсолютное движение шарика).

Рис.71
Как видим, после установки шарика легче выявить относительное и переносное движения.
Введение дополнительных тел особенно целесообразно в случаях, когда передача движения от звена к звену осуществляется с помощью гибких поворачивающихся нитей.
Пример 41. В механизме на рис. 72 движение штока АМ в горизонтальных направляющих передается посредством гибкого троса грузу В. Чтобы установить зависимость между характеристиками движения штока АМ и груза В, надо представить, что точка М совершает сложное движение.
Ее движение относительно стойки по горизонтали, очевидно, – абсолютное движение.
Увидеть относительное и переносное движения поможет введение стержня ОС (рис. 73), поворачивающегося вокруг О, и ползуна М, скользящего на этом стержне. (Шток АМ и ползун М соединены шарнирно).
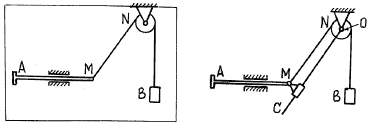
Рис. 72 Рис. 73
При таком дополнении механизма горизонтальное движение штока АМ вызывает не только подъем (или опускание) груза В, но и поворот стержня ОС вокруг О, а также скольжение ползуна М по стержню. Очевидно, относительным движением точки М (ползуна М) надо считать ее движение вдоль стержня ОС, а переносным движением – поворачивание стержня ОС вокруг О.
Если теперь вернуться к схеме механизма на рис. 72, то можно считать, что относительное движение точки М есть ее движение вдоль троса МN, а переносное движение – поворачивание троса вокруг N. Увидеть это без рассмотрения схемы на рис. 73 затруднительно.
-
Работа силы. Потенциальное поле.
О РАБОТЕ В ПОТЕНЦИАЛЬНЫХ ПОЛЯХ
Если под действием силы F материальная точка прошла бесконечно малый путь dS, то работу можно определить как скалярное произведение вектора силы на вектор перемещения
![]() (1)
(1)
где Fs ─ проекция силы F на направление перемещения частицы dS.
Из такого определения работы следует, что сила, направленная перпендикулярно пути, не производит работы. В частности, при равномерном движении материальной точки по окружности работа сил равна нулю. Покажем, что эти два утверждения ошибочны.
В
соответствии с законом инерции Галилея
всякое тело оказывает сопротивление
при попытках привести его в движение
или изменить модуль или НАПРАВЛЕНИЕ
ЕГО ДВИЖЕНИЯ. Это свойство тел называется
инертностью. Чтобы преодолеть
сопротивление, необходимо приложить
усилие, т.е. совершить работу. Определим
работу, которую надо затратить, чтобы
изменить направление движения тела,
т.е. повернуть вектор скорости V0
(или вектор импульса
![]() )
на некоторый угол α. Изменение направления
движения производится за счет действия
импульса силы I2.
Из треугольника импульсов по теореме
косинусов находим
)
на некоторый угол α. Изменение направления
движения производится за счет действия
импульса силы I2.
Из треугольника импульсов по теореме
косинусов находим
![]() .
Работа поворота тела массы m
при
постоянной скорости V0
будет
равна
.
Работа поворота тела массы m
при
постоянной скорости V0
будет
равна
![]() ;
;
![]() (2)
(2)
Обозначим
![]() -
кинетическая энергия тела, тогда работа
поворота на 90о
будет равна
-
кинетическая энергия тела, тогда работа
поворота на 90о
будет равна
![]() ,
на 180о
-
,
на 180о
-
![]() ,
на 360о
-
,
на 360о
-
![]() .
Таким образом, работа поворота на 360о
или работа одного оборота при равномерном
движении тела по окружности равна
.
Таким образом, работа поворота на 360о
или работа одного оборота при равномерном
движении тела по окружности равна
![]() .
Эту работу совершает центростремительная
сила, хотя в соответствии с формулой
(1) эта работа должна быть равна нулю.
Причина более столетнего заблуждения
по поводу работы, совершаемой
центростремительными силами, состоит
в том, что скалярное произведение (1)
надо дополнить другим выражением:
.
Эту работу совершает центростремительная
сила, хотя в соответствии с формулой
(1) эта работа должна быть равна нулю.
Причина более столетнего заблуждения
по поводу работы, совершаемой
центростремительными силами, состоит
в том, что скалярное произведение (1)
надо дополнить другим выражением:
![]() ,
где
,
где
![]() -
проекция перемещения dS
на
направление действия силы F.
Именно это выражение надо использовать
при криволинейном движении, когда вектор
силы F
перпендикулярен dS.
-
проекция перемещения dS
на
направление действия силы F.
Именно это выражение надо использовать
при криволинейном движении, когда вектор
силы F
перпендикулярен dS.
Поле сил называется потенциальным, если работа при перемещении в этом поле зависит лишь от начальной и конечной точек пути и не зависит от траектории. Другим эквивалентным определением потенциальности является требование равенства работы нулю при перемещении по любому замкнутому контуру.
Покажем,
что эти оба утверждения тоже ошибочны.
От вида пути не зависит изменение
потенциальной энергии, а работа и
изменение потенциальной энергии не
всегда эквивалентны. Рассмотрим это на
примере движения тела в однородном поле
тяжести. При движении тела вниз от
верхней потенциальной поверхности h1
до нижней потенциальной поверхности
h2
на тело действует только одна сила
![]() и
движение происходит по вертикали, т.е.
вдоль линии напряженности поля. Сила
тяжести совершает работу
и
движение происходит по вертикали, т.е.
вдоль линии напряженности поля. Сила
тяжести совершает работу
![]() ;
;
![]() (3)
(3)
Чтобы
остановить тело на уровне h2,
необходимо затратить работу торможения,
равную кинетической энергии тела
![]() .
Суммарная работа будет равна
.
Суммарная работа будет равна
![]() .
.
При движении тела вертикально вверх под действием постоянной силы тяги FT уравнение движения (II закон Ньютона) имеет вид
![]() (4)
(4)
Если
![]() ,
то правая часть тождественно равна
нулю, и движения тела вверх не происходит,
но в этом случае сила давления тела на
опору равна нулю, поскольку сила тяги
нейтрализует «тяжелую» массу, и тело
находится в состоянии левитации.
Обозначим силу тяги, равную mg,
значком «штрих»:
,
то правая часть тождественно равна
нулю, и движения тела вверх не происходит,
но в этом случае сила давления тела на
опору равна нулю, поскольку сила тяги
нейтрализует «тяжелую» массу, и тело
находится в состоянии левитации.
Обозначим силу тяги, равную mg,
значком «штрих»:
![]() .
Если сила тяги
.
Если сила тяги
![]() больше
mg
на величину ΔF,
то уравнение (4) запишется в виде
больше
mg
на величину ΔF,
то уравнение (4) запишется в виде
![]() (5)
(5)
Таким
образом, часть силы тяги
![]() не
принимает участия в работе по подъему
тела вверх. Тело будет подниматься вверх
только благодаря действию силы ΔF
с
ускорением
не
принимает участия в работе по подъему
тела вверх. Тело будет подниматься вверх
только благодаря действию силы ΔF
с
ускорением
![]() .
За время t
высота подъема
.
За время t
высота подъема
![]() .
Работа подъема
.
Работа подъема
![]() .
Точно такую же работу надо затратить
на торможение тела на верхнем уровне
h1.
Таким образом, в общем случае работы не
подъема тела и его спуска не совпадают,
но можно подобрать такую ΔF,
что эти работы совпадут.
.
Точно такую же работу надо затратить
на торможение тела на верхнем уровне
h1.
Таким образом, в общем случае работы не
подъема тела и его спуска не совпадают,
но можно подобрать такую ΔF,
что эти работы совпадут.
Что
же делает часть силы тяги
![]() ?
Она удерживает тело от свободного
падения в поле гравитации. Её работу A´
можно
определить выражением, аналогичным
A21,
т.е.
?
Она удерживает тело от свободного
падения в поле гравитации. Её работу A´
можно
определить выражением, аналогичным
A21,
т.е.
![]() .
Вместо силы ΔF
подъем тела можно производить с постоянной
скоростью
.
Вместо силы ΔF
подъем тела можно производить с постоянной
скоростью
![]() ,
для чего телу надо сообщить импульс
силы
,
для чего телу надо сообщить импульс
силы
![]() ,
тогда работа подъема будет равна
,
тогда работа подъема будет равна
![]() .
Можно искусственно выбрать
.
Можно искусственно выбрать
![]() такой,
что работы A12
и A21
совпадут. Но при этом останется еще
работа A´.
такой,
что работы A12
и A21
совпадут. Но при этом останется еще
работа A´.
Если траектории движения тел отличаются от вертикальных прямых линий, совпадая с данной прямой только в верхней и нижней точках, то значит, на тело действовали еще и другие (горизонтальные) силы, а не только вертикальные силы данного потенциального поля. Короче говоря, совершается дополнительная работа на повороты вектора скорости, т.е. работа зависит от формы траектории, а работа подъема всегда больше работы спуска.
Работа силы, мощность
Изменение кинетической энергии механической системы связано с работой сил, приложенных к этой системе. Элементарная работа силы. Пусть точка приложения силы F перемещается по криволинейной траектории из положения. Мо в положение Л/, (рис. 15.29). Разобьем перемещение точки М по дуге МОМХ на элементарные (бесконечно малые) перемещения ds и определим работу силы на каждом таком перемещении
![]()
где а — угол между векторами F и v в точке М.
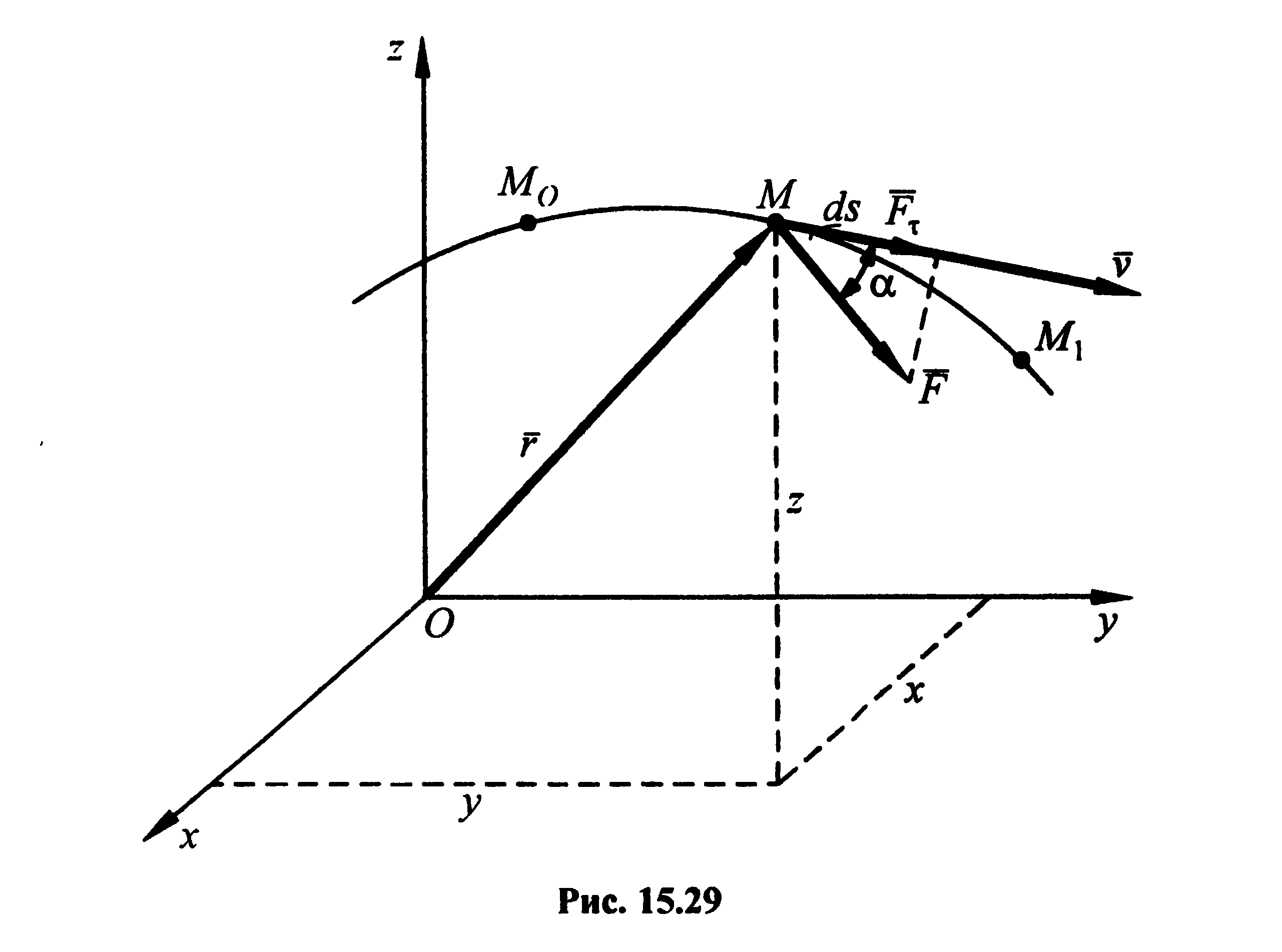
Формула (15.85) определяет элементарную работу силы, обо- значение d' используется для того, чтобы подчеркнуть, что выражение для элементарной работы не всегда является полным дифференциалом. Величина d'A скалярная, ее знак определяется
знаком функции cos а. Если а = я/2, то */'Л = 0, если проекция силы направлена в сторону, противолежащую перемещению, то
d'A < О . Так как Fcosot = Fx, то формулу (15.85) можно представить в виде
![]()