


Тема 3. ВЛИЯНИЕ ВНЕШНИХ СИЛ НА КОЛЕБАТЕЛЬНЫЕ ПРОЦЕССЫ
3.1.Свободные затухающие механические колебания
3.2.Коэффициент затухания
илогарифмический декремент затухания
3.3.Вынужденные механические колебания
3.4.Автоколебания
3.1. Свободные затухающие механические колебания
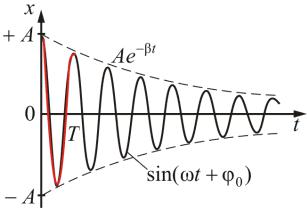
Все реальные колебания являются затухающими. Энергия механических колебаний постепенно расходуется на работу против сил трения и амплитуда колебаний постепенно уменьшается (затухает).
Во многих случаях в первом приближении можно считать, что при небольших скоростях силы, вызывающие затухание колебаний, пропорциональны величине скорости (например маятник). Тогда сила трения
(или сопротивления)
Fтр = −rυr,
где r – коэффициент сопротивления, υ – скорость движения.
Запишем второй закон Ньютона для затухающих прямолинейных колебаний вдоль оси x:
max = −kx −rυx ,
где kx – возвращающая сила, rυx – сила трения. Это переписать:
m |
d2 x |
= −kx −r |
dx |
, отсюда следует: |
d2 x |
+ |
r dx |
|||
|
2 |
|
dt2 |
|
|
|||||
dt |
dt |
m dt |
||||||||
|
|
|
|
|||||||
уравнение можно
+ mk x = 0.
Введем обозначения: |
r |
=β; |
k |
= ω02 . |
|
2m |
m |
||||
|
|
|
Тогда однородное дифференциальное уравнение второго порядка, описывающее затухающее колебательное движение, запишем так:
d2 x |
+ 2β |
dx |
2 |
|
|
(3.1.1) |
dt 2 |
dt |
+ω0 x = 0 . |
||||
|
|
|
|
|
||
Решение уравнения (3.1.1) имеет вид (при β ≤ ω0 ): |
|
|||||
x = A e−βt cos(ωt −φ |
0 |
) . |
(3.1.2) |
|||
|
0 |
|
|
|
|
|
Здесь А0 и φ0 определяются из краевых условий задачи (начальных и граничных), а β и ω – из самого уравнения.
Найдем круговую частоту ω. Здесь она уже не равна ω0 (ω ≠ ω0 ) .
26

Для этого найдем первую и вторую производные от x: ddxt = −βA0e−βt cos(ωt +φ0 ) −ωA0e−βt sin(ωt +φ0 ) ,
d2 x = β2 A0e−βt cos(ωt +φ0 ) +βωA0e−βt sin(ωt +φ0 ) + dt 2
+βωA0e−βt sin(ωt +φ0 ) −ω2 A0e−βt cos(ωt +φ0 ).
Подставим эти значения в (3.1.1) и сократим на A0e−βt :
β2 cos(ωt +φ0 ) + 2βωsin(ωt +φ0 ) −ω2 cos(ωt +φ0 ) −
−2β2 cos(ωt +φ0 ) −2ωβsin(ωt +φ0 ) +ω02 cos(ωt +φ0 ) = 0;
−β2 cos(ωt + φ0 ) −ω2 cos(ωt + φ0 ) + ω02 cos(ωt + φ0 ) = 0 .
Сократим на cos(ωt + φ0 ) и выразим ω:
−β2 −ω2 −ω02 = 0; ω2 = ω02 −β2 ,
ω=  ω02 −β2 ,
ω02 −β2 ,
где ω0 – круговая частота собственных колебаний (без затухания); ω – круговая частота свободных затухающих колебаний. Из этого вы-
ражения ясно, почему решение (3.1.1) будет только при β ≤ ω0 .
Для колебаний под действием различных сил (квазиупругих) значения ω, β, ω0 будут различными. Например, для колебаний под действием упругой силы
|
|
k |
|
r |
|
|
k |
|
r 2 |
|
ω0 |
= |
|
; β = |
|
; |
ω = |
|
− |
|
. |
m |
2m |
m |
|
|||||||
|
|
|
|
|
|
2m |
||||
Затухающие колебания представляют собой непериодические колебания, так как в них не повторяется, например, максимальное значение амплитуды. Поэтому называть ω – циклической (повторяющейся, круговой) частотой можно лишь условно. По этой же причине и
T = |
2π |
= |
2π |
|
ω |
ω02 −β2 |
|||
|
|
называется условным периодом затухающих колебаний.
3.2. Коэффициент затухания и логарифмический декремент затухания
Найдем отношение значений амплитуды затухающих колебаний в моменты времени t и t +T (рис. 3.1):
27
A(t) |
|
A e−βt |
|
e−βt |
= e |
βT |
|
|
= |
0 |
= |
|
|
, |
|
A(t +T ) |
A e−β(t +T ) |
e−βte−βT |
|
||||
|
|
|
|
|
|||
|
|
0 |
|
|
|
|
|
где β – коэффициент затухания.
Рис. 3.1
Натуральный логарифм отношения амплитуд, следующих друг за другом через период Т, называется логарифмическим декрементом затухания χ:
χ = ln |
A(t) |
= ln eβT = βT ; |
|
A(t +T ) |
|||
|
|
χ = βT .
Выясним физический смысл χ и β.
Время релаксации τ – время, в течение которого амплитуда А уменьшается в e раз.
A0 |
= eβτ = e1, отсюда βτ =1; |
β = |
1. |
|
A |
||||
|
|
τ |
||
τ |
|
|
|
Следовательно, коэффициент затухания β есть физическая вели-
чина, обратная времени, в течение которого амплитуда уменьшается в е раз.
Пусть N число колебаний, после которых амплитуда уменьшается в e раз. Тогда
τ = NT ; |
T = |
τ |
|
; |
|
β = |
1 |
; |
|||
N |
τ |
||||||||||
|
|
τ |
|
1 |
|
|
|||||
|
χ = βT = |
|
|
= |
. |
|
|
||||
|
τN |
|
|
|
|||||||
|
|
|
|
N |
|
|
|||||
Следовательно, логарифмический декремент затухания χ есть физическая величина, обратная числу колебаний, по истечении которых амплитуда А уменьшается в e раз.
Если χ = 0,01, то N = 100.
28

При большом коэффициенте затухания происходит не только быстрое уменьшение амплитуды, но и заметно увеличивается период колебаний. Когда сопротивление становится равным критическому r = rкр , а β = ω0 , то круговая частота обращается в нуль ( ω = 0 ), а
(T → ∞), колебания прекращаются. Такой процесс называется аперио-
дическим (рис. 3.2).
Рис. 3.2
Отличия в следующем. При колебаниях тело, возвращающееся в положение равновесия, имеет запас кинетической энергии. В случае
апериодического движения энергия тела при возвращении в положение равновесия оказывается израсходованной на преодоление сил сопротивления, трения.
3.3. Вынужденные механические колебания
Рассмотрим систему, на которую, кроме упругой силы (– kx) и сил сопротивления (– rυ), действует добавочная периодическая сила F – вынуждающая сила. Для колебаний вдоль оси x запишем:
max = −kx − rυx + Fx
– основное уравнение колебательного процесса, или
d2 x |
+ 2β |
dx |
2 |
(3.3.1) |
dt 2 |
dt |
+ ω0 x = fx , |
||
|
|
|
где fx = Fx/m – вынуждающая сила, изменяющаяся по гармоническому закону:
fx = F0 cos ωt.
Через некоторое время после начала действия вынуждающей силы колебания системы будут совершаться с частотой вынуждающей
силы ω. Уравнение установившихся вынужденных колебаний: |
|
x = Asin(ωt + φ) . |
(3.3.2) |
Наша задача найти амплитуду А и разность фаз φ между смещением вынужденных колебаний и вынуждающей силой.
29
Обратим внимание на то, что скорость на π/2 опережает смещение, а ускорение на π/2 опережает скорость (см. п. 1.3).
Из (3.3.2) получим:
|
|
υx = |
dx |
= ωAcos(ωt + φ) , |
(3.3.3) |
|
|
||||||
|
dυx |
|
dt |
|
||
ax = |
= −ω2 Asin(ωt + φ) = ω2 Acos(ωt + φ+ π/ 2). |
(3.3.4) |
||||
|
||||||
|
dt |
|
||||
Преобразуем и (3.3.2) через косинус: |
|
|||||
|
|
x = Acos(ωt + φ+ π/ 2) . |
(3.3.5) |
|||
Обозначим α = φ− π/ 2 – угол между смещением и вынуждающей
силой.
Подставим (3.3.3), (3.3.4) и (3.3.5) в (3.3.1):
ω2 Acos ωt + φ0 + π +
2
ω2 cos ωt + φ+ π +
2
2βωAcos(ωt +
2βωcos(ωt + φ
|
|
|
|
π |
|
|
F |
|
||
φ) + ω02 Acos |
ωt + φ− |
|
|
= |
|
0 |
cos ωt, |
|||
2 |
|
m |
||||||||
|
|
|
|
|
|
|
|
|||
|
|
π |
|
|
|
|
F |
|
|
|
)+ ω02 cos ωt |
+ φ− |
|
|
= |
|
|
0 |
|
cos ωt. |
|
2 |
|
mA |
||||||||
|
|
|
|
|
|
|
||||
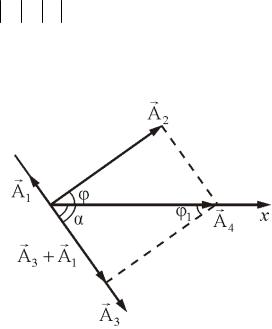
Каждое слагаемое последнего уравнения можно представить в виде соответствующего вращающегося вектора амплитуды:
A1 = ω2 – амплитуда ускорения; A2 = 2βω – амплитуда скорости; A3 = ω02 – амплитуда смещения; A4 = F0 / mA – амплитуда вынуждающей силы, причем A3 > A1 .
Вектор амплитуды силы найдем по правилу сложения векторов: A4 = A1 + A2 + A3 .
Рис. 3.3
Из рис. 3.2 видно, что A42 = ( A3 − A1 )2 + A22 . Найдем амплитуду А:
30
A = |
F0 |
= |
|
|
F0 |
|
|
, |
||
mA4 |
m |
( A |
− A )2 |
+ |
A2 |
|||||
|
|
|
|
|||||||
|
|
|
|
|
3 |
1 |
|
2 |
|
|
A = |
|
|
|
|
F0 |
|
|
. |
(3.3.7) |
|
m (ω02 −ω2 )2 +4β2ω2 |
||||||||||
Таким образом, A ~ F0 / m и ~ 1/β.
При постоянных F0, m и β амплитуда зависит только от соотношения круговых частот вынуждающей силы ω и свободных незатухающих колебаний системы ω0.
Начальную фазу вынужденных колебаний можно найти из выраже-
ния
|
A |
− A |
|
ω2 |
−ω2 |
|
|
tgφ = |
3 |
1 |
= |
0 |
|
. |
(3.3.8) |
|
A |
|
|||||
|
|
|
2βω |
|
|
||
|
|
2 |
|
|
|
|
|
Из рис. 3.3 видно, что сила опережает смещение на угол, который определяется из выражения
tgα = |
|
A2 |
= |
2βω |
. |
||
A |
− A |
ω2 |
− ω2 |
||||
|
|
|
|||||
|
3 |
1 |
|
0 |
|
|
|
Проанализируем выражение (3.3.7).
1) ω = 0 (частота вынуждающей силы равна нулю), тогда
A = F0 / mω0
–статическая амплитуда (колебания не совершаются).
2)β = 0 (затухания нет). С увеличением ω (но при ω< ω0 ) амплиту-
да растет и при ω= ω0 резко возрастает ( А→∞). Это явление называется резонанс. При дальнейшем увеличении ω ( ω> ω0 ) амплитуда опять уменьшается (рис. 3.4).
Рис. 3.4 3) β ≠ 0. Амплитуда будет максимальна при минимальном значении
знаменателя. Для нахождения точки перегиба возьмем первую производную поωотподкоренноговыражения(3.3.7) иприравняемеекнулю:
31

|
d |
[(ω02 |
−ω2 )2 + 4β2ω2 ]= |
d |
[ω04 − 2ω02ω2 + ω4 |
+ 4β2 |
ω2 |
]= −4ω02 |
ω+ |
|
dω |
|
|||||||
|
|
|
dω |
|
|
|
|
||
|
|
|
+ 4ω3 +8β2ω = − 4ω(ω02 −ω2 − 2β2 )= 0. |
|
|
|
|||
4ω ≠ 0, следовательно, выражение в скобках равно нулю: |
|
|
|||||||
|
|
|
ω02 −ω2 − 2β2 = 0 , отсюда |
|
|
|
|
||
|
|
|
ωрез = ω02 − 2β2 , |
|
|
|
(3.3.9) |
||
где ωрез – резонансная частота.
Явление возрастания амплитуды вынужденных колебаний при приближении частоты вынуждающей силы к ωрез называется резонансом.
Для консервативной системы, т.е. β = 0, из (3.3.9) следует ωрез = ω0 ; для диссипативной ωрез несколько меньше собственной кру-
говой частоты ω0 (рис. 3.4).
С увеличением коэффициента затухания β явление резонанса про-
является все слабее и исчезает при β > ω20 .
3.4. Автоколебания
Наблюдая колебания листьев деревьев, дорожных знаков над проезжей частью улиц, полотнищ на ветру и др., мы понимаем, что во всех перечисленных случаях незатухающие колебания происходят за счет энергии постоянно дующего ветра. При этом сама колебательная система производит отбор энергии ветра в нужный момент времени и в количестве, требуемом для компенсации неизбежно присутствующих энергетических потерь. Колебания в этих системах начинаются самопроизвольно за счет начальных флуктуаций (дрожаний) колеблющихся предметов. Частота и амплитуда установившихся колебаний определяется как параметрами самой системы, так и параметрами ее взаимодействия с ветром. Такие колебания являются примерами автоколебаний, а сами системы – примерами автоколебательных систем.
Классическим примером автоколебательной системы служат механические часы с маятником и гирями. Эти часы периодически «черпают» энергию при опускании гирь, подвешенных к цепочке, перекинутой через шестерню часового механизма.
Принцип работы всех автоколебательных систем можно понять, обратившись к схеме, изображенной на рис. 3.5.
32

Рис. 3.5
Периодическим поступлением энергии в колебательную систему от источника энергии по каналу АВ управляет сама колебательная система посредством обратной связи. Схематически это изображено в виде некоторого запирающего канал АВ устройства (ключа), который управляется самой системой. Так, в зависимости от положения и скорости колеблющегося листа на ветру будет различной мощность сил аэродинамического давления.
В конструкции часового механизма (рис. 3.6) присутствует специальное устройство – анкер, выполняющий роль ключа. Этот анкер, представляющий собой коромысло, приводится в колебание самим маятником часов. При определенных положениях он «отпирает» одну из шестерен часового механизма. В этот момент времени шестерня проворачивается за счет момента сил, приложенного со стороны натянутой цепи с грузом. Груз при этом опускается на небольшую величину. Количество энергии, поступающей в часовой механизм, равно по величине уменьшению потенциальной энергии груза в поле силы тяжести.
Рис. 3.6
Важно отметить, что любая автоколебательная система нелинейна. На схеме это отражено наличием в системе обратной связи нелинейного ограничителя сигнала, управляющего ключом. Нелинейность системы проявляется в том, что при начальном нарастании амплитуды колебаний, порожденных флуктуациями, поступление энергии в систему за каждый последующий период колебаний увеличивается нелинейно, т.е. прирост поступающей энергии становится все меньше и меньше. Естественно, что амплитуда колебаний достигнет такой установившейся величины, при которой приток энергии и ее потери будут равны.
33