

15.15. U-образная характеристика синхронного двигателя
Значение тока возбуждения влияет не только на запас устойчивости синхронного двигателя, но и на его реактивный ток. Чтобы проанализировать эту зависимость, воспользуемся векторной диаграммой фазы синхронного двигателя, подключенного к системе большой мощности (U = const), приведенной на рис. 15.16. При постоянном тормозном моменте на валу синхронного двигателя Mтор = Mэм его мощность Р = Mэмωр постоянна, следовательно, из (15.18) и (15.19) значения произведений сомножителей
и
всегда постоянны и не зависят от тока возбуждения. На рис. 15.17 приведена совокупность векторных диаграмм фазы синхронного двигателя с постоянным тормозным моментом Mтор = const при различных токах возбуждения Iв = var. При уменшении тока возбуждения Iв (потокосцепления возбуждения 40) угол 8 возрастает до тех пор, пока синхронный двигатель не потеряет устойчивость.
Из векторных диаграмм следует, что значение и характер тока статора синхронного двигателя İ = İ а + İ р зависят от тока возбуждения Iв. При токах возбуждення, меньших (больших) некоторого граничного значения
![]()
т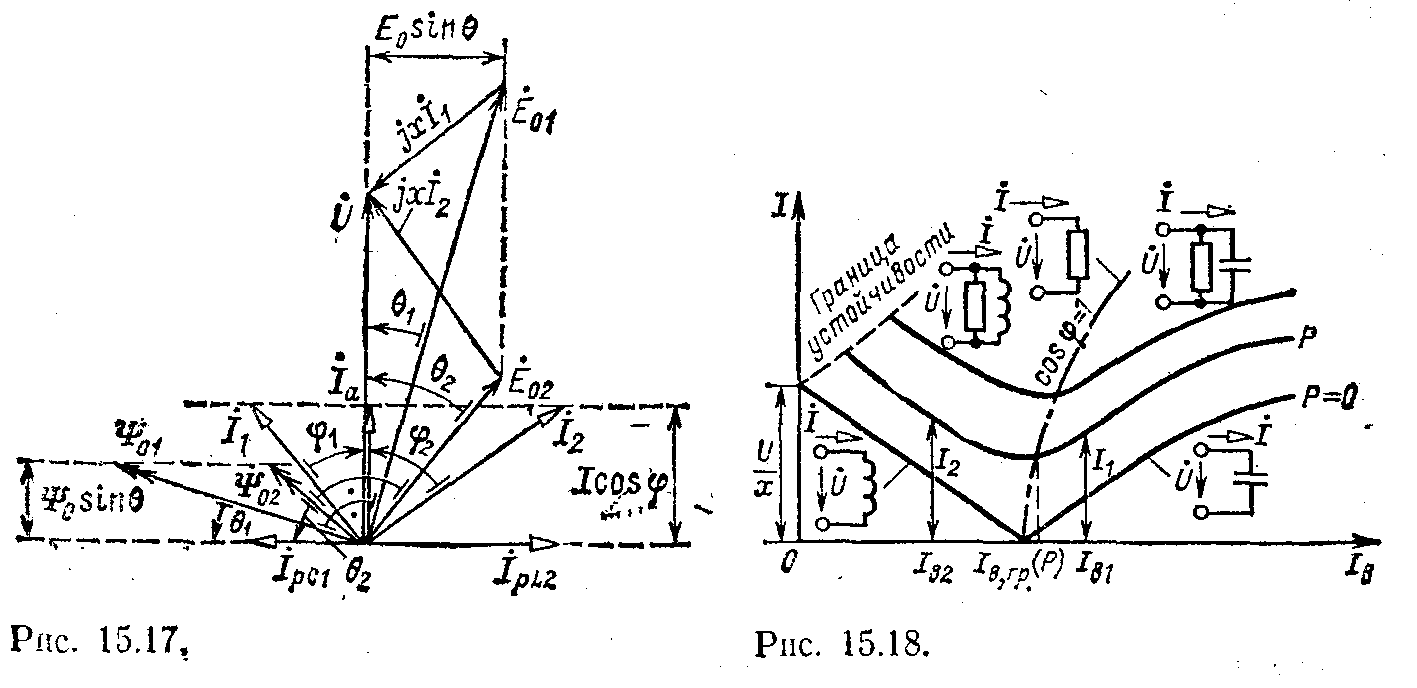 ок
статораI
имеет индуктивную IpL,
(емкостную Ipс)
реактивную составляющую φ
>
0 (φ < 0) . Следовательно, при недовозбуждении
(перевозбуждении) реактивная мощность
синхронного двигателя имеет индуктивный
QL
= 3UIp
L
(емкостный
Qc
= 3UIp
c)
характер.
ок
статораI
имеет индуктивную IpL,
(емкостную Ipс)
реактивную составляющую φ
>
0 (φ < 0) . Следовательно, при недовозбуждении
(перевозбуждении) реактивная мощность
синхронного двигателя имеет индуктивный
QL
= 3UIp
L
(емкостный
Qc
= 3UIp
c)
характер.
В соответствии с этим фазу синхронного двигателя, подключенного к электрической системе большой мощности, можно представить в виде эквивалентной схемы замещения, состоящей из параллельного соединения эквивалентного резистивного элемента, сопротивление которого зависит от тормозного момента r = U/Ia = F(Mтор), к эквивалентного индуктивного (емкостного) элемента, индуктивность (емкость)которого зависит от тормозного момента и тока возбуждения:
Если тормозной момент двигателя равен нулю (Мтор = 0), то в эквивалентной схеме замещения фазы синхронного двигателя, подключенного к системе большой мощности, резистивный элемент отсутствует, а значение параметра индуктивного (емкостного) элемента зависит только от тока возбуждения.
Зависимость тока статора, подключенного к системе большой мощности (U = const), от тока возбуждения I (Iв) при постоянном тормозном моменте на валу Mтор = const называется U-образной характеристикой синхронного двигателя (рис. 15.18).
Если на валу двигателя нет тормозного момента (Мтор = 0), то, пренебрегая всеми видами потерь, можно считать ток статора синхронного двигателя только реактивным (рис. 15.18, Р= 0):
![]()
15.16. Регулирование активной и реактивной мощностей синхронного двигателя
Изменение активной мощности синхронного двигателя Рмех = Р = ЗUIa = = ωрМтор, подключенного к системе большой мощности (U = const), происходит при изменении значения тормозного момента на валу (Мтор = =var). При увеличении тормозного момента мощность синхронного двигателя возрастает, одновременно увеличивается и угол θ, что понижает запас устойчивости двигателя π/2 — θ. Для того чтобы синхронный двигатель не терял запаса устойчивости при увеличении активной мощности, необходимо одновременно увеличивать ток возбуждения. Синхронные двигатели большой мощности снабжены специальной регулирующей аппаратурой, с помощью которой при изменении активной мощности двигателя обеспечивается требуемый уровень запаса устойчивости.
Реактивная мощность синхронного двигателя Q = 3UIsinφ>, подключенного к системе большой мощности (U = const), при постоянной активной мощности Р регулируется изменением тока возбуждения Iв.
При токе возбуждения Iв < Iв,гр(Р) (Iв > Iв,гр) реактивная мощность двигателя имеет индуктивный характер Q = 3UIpL (емкостный характер Qc = 3U1 pс).
Обычно режим возбуждения синхронного двигателя соответствует емкостной реактивной мощности, что позволяет компенсировать индуктивную реактивную мощность асинхронных двигателей и этим разгрузить электрическую систему от реактивного тока.
Практический интерес представляет использование синхронного двигателя в режиме регулируемого емкостного элемента (рис. 15.18, Р = 0) — синхронного компенсатора. Синхронные, компенсаторы позволяют улучшить коэффициент мощности cos φ электрической системы (см. § 2.20).