

3 Кинематическое исследование механизма
3.1 Определение скоростей точек механизма
Определение скоростей точек механизма для заданного положения ведущего звена произведем графоаналитическим методом [2].
Угловая скорость кривошипа 1
![]()
Линейная скорость точки В
![]()
Составляем векторное уравнение для скорости точки С
![]() ,
,
где ![]() -
вектор скорости точки В
(известен по величине и по направлению
– перпендикулярно кривошипу в сторону
его вращения);
-
вектор скорости точки В
(известен по величине и по направлению
– перпендикулярно кривошипу в сторону
его вращения);
![]() -
вектор абсолютной скорости точки С
(известен по направлению – параллельно
направляющей ползуна
-
вектор абсолютной скорости точки С
(известен по направлению – параллельно
направляющей ползуна
![]() );
);
![]() - вектор
относительной скорости точки С
при вращении вокруг В
(известен по направлению – перпендикулярно
шатуну 2).
- вектор
относительной скорости точки С
при вращении вокруг В
(известен по направлению – перпендикулярно
шатуну 2).
Скорости
![]() и
и![]() известны только по направлению, их
величины найдем, построив
план скоростей механизма (рис. 2).
известны только по направлению, их
величины найдем, построив
план скоростей механизма (рис. 2).
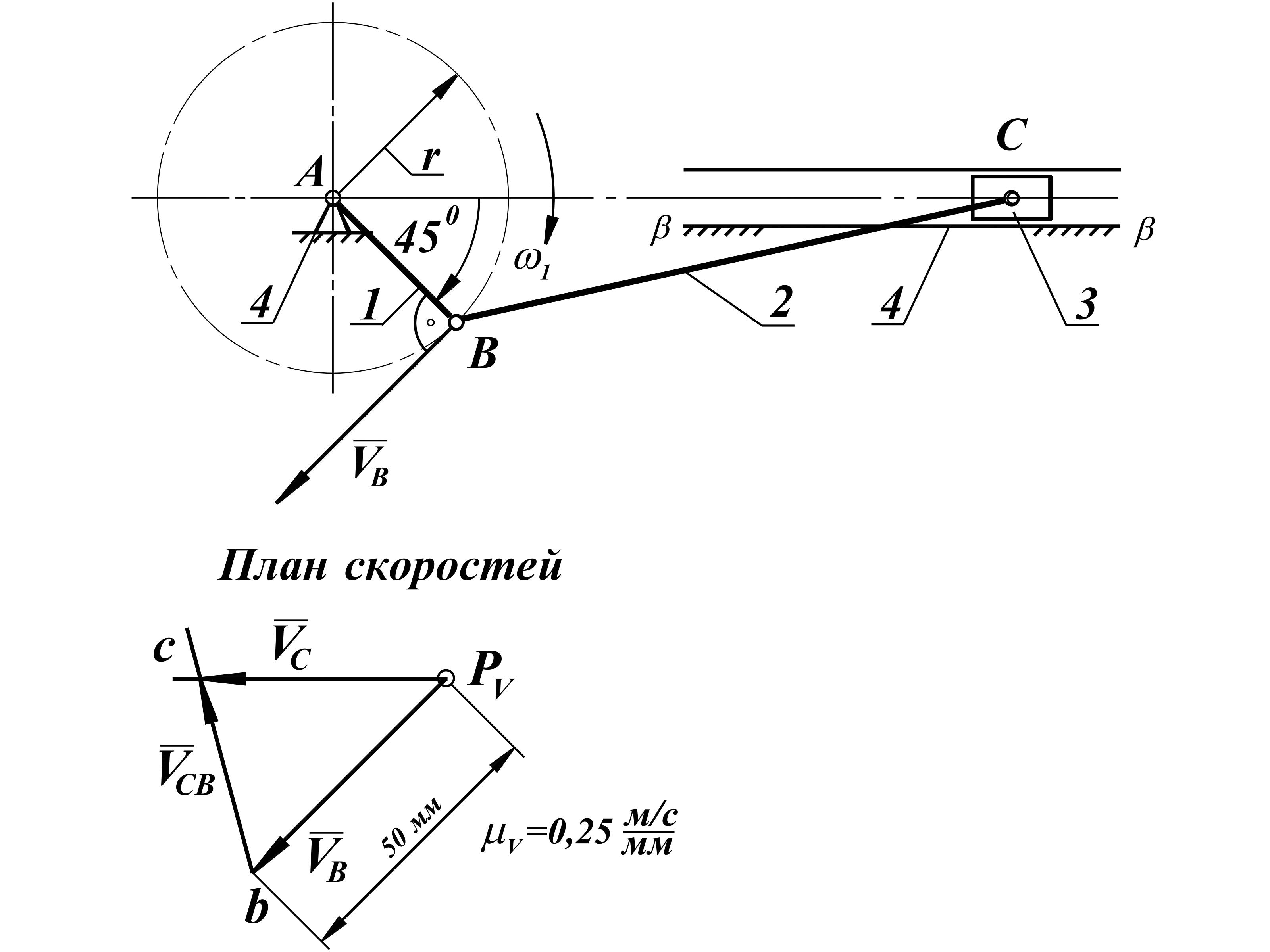
Рисунок 2 – Кинематическая схема кривошипно-ползунного механизма
с планом скоростей механизма
Изобразим вектор скорости
![]() в виде отрезка
в виде отрезка
![]() произвольной длины, например, 50 мм, где
произвольной длины, например, 50 мм, где![]() - полюсплана
скоростей.
- полюсплана
скоростей.
Примем масштаб построения плана скоростей
![]()
На плане
скоростей проводим
линию действия скорости
![]() из полюса
из полюса![]() параллельно направляющей ползуна
параллельно направляющей ползуна![]() и линию действия скорости
и линию действия скорости![]() из конца вектора
из конца вектора![]() перпендикулярно шатуну2.
Эти линии пересекаются в точке
перпендикулярно шатуну2.
Эти линии пересекаются в точке
![]() ,
отсекая отрезки
,
отсекая отрезки
![]() и
и![]() .
.
Скорости
![]() и
и
![]() находим с учетом масштаба
находим с учетом масштаба
![]() построения плана
скоростей:
построения плана
скоростей:
![]() ;
;
![]() .
.
Угловая скорость шатуна 2 составляет
![]()
3.2 Определение ускорений точек механизма
Так как кривошип вращается с постоянной угловой скоростью, ускорение точки В кривошипа равно нормальному и составляет
![]() .
.
Векторное уравнение для определения ускорения точки С имеет вид
![]() ,
,
где ![]() -
вектор ускорения точки С;
-
вектор ускорения точки С;
![]() - вектор
нормального относительного ускорения
точки С;
- вектор
нормального относительного ускорения
точки С;
![]() -вектор
тангенциального относительного ускорения
точки С.
-вектор
тангенциального относительного ускорения
точки С.
Нормальное относительное ускорение точки С
![]()
Ускорения
![]() и
и![]() известны по величине и по направлению.
Ускорения
известны по величине и по направлению.
Ускорения![]() и
и![]() известны только по направлению. Их
величины найдем, построив
план ускорений механизма (рис. 3).
известны только по направлению. Их
величины найдем, построив
план ускорений механизма (рис. 3).
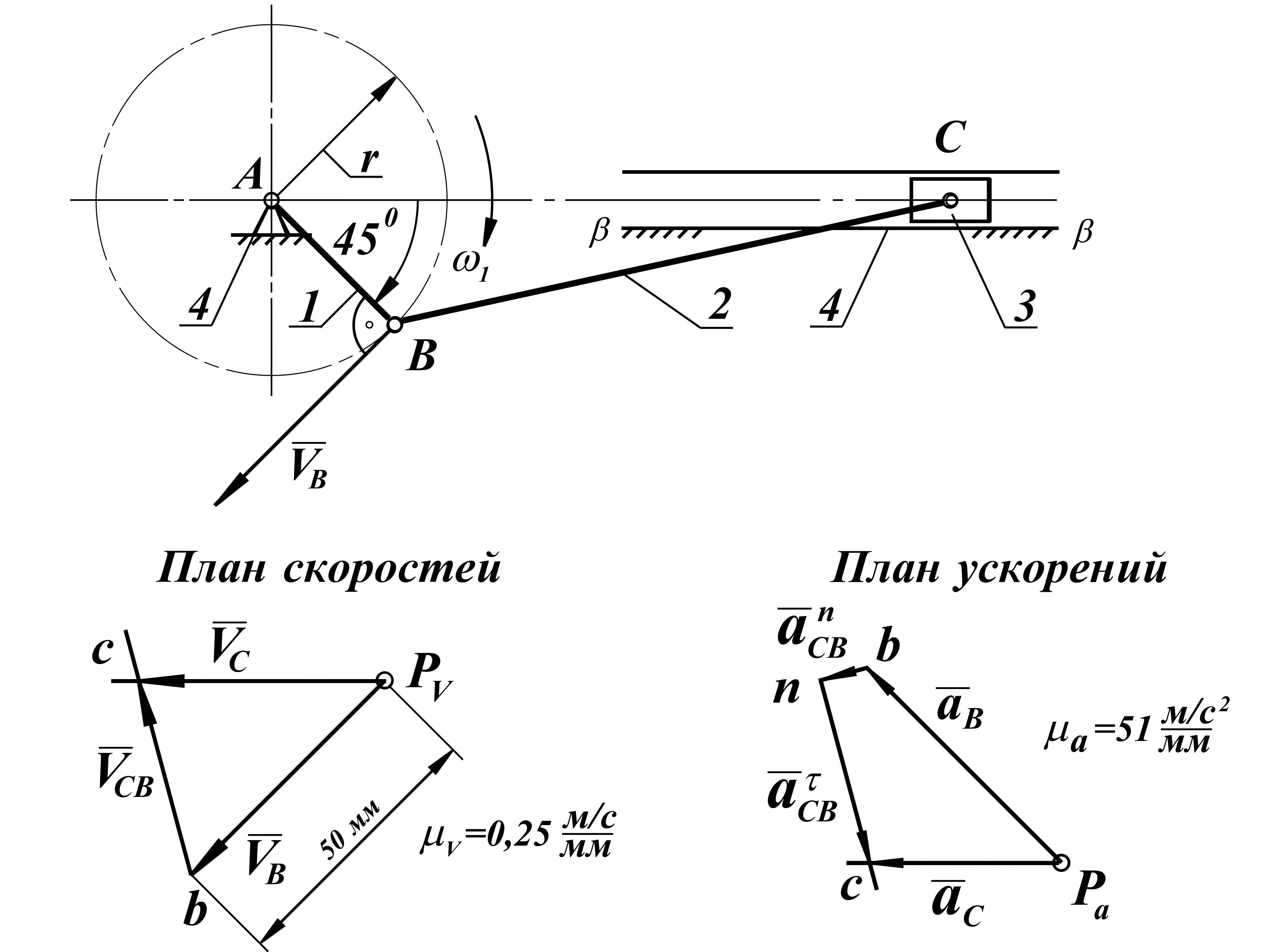
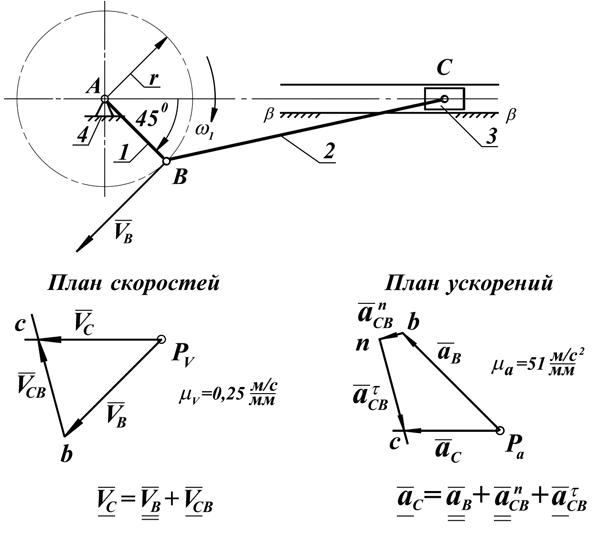
Рисунок 3 – Кинематическая схема кривошипно-ползунного механизма с планом скоростей механизма и планом ускорений механизма
Построение плана ускорений
начинаем с вектора
![]() ,
который изображаем в виде отрезка
,
который изображаем в виде отрезка
![]() произвольной длины, например 50 мм,
направленного параллельно кривошипу1
из полюса
произвольной длины, например 50 мм,
направленного параллельно кривошипу1
из полюса
![]() .
Так как ускорение
.
Так как ускорение![]() является центростремительным, вектор
является центростремительным, вектор
![]() должен быть направлен в сторону центра
вращения кривошипа.
должен быть направлен в сторону центра
вращения кривошипа.
Выберем масштаб плана ускорений механизма:
![]()
Длину
отрезка
![]() ,
отображающего наплане
ускорений нормальное
относительное ускорение
,
отображающего наплане
ускорений нормальное
относительное ускорение
![]() ,
вычисляем с учетом масштаба
,
вычисляем с учетом масштаба
![]() .
.
Откладываем на
плане
ускорений вектор
ускорения
![]() длиной 8,5 мм параллельно шатуну2.
Направление вектора
длиной 8,5 мм параллельно шатуну2.
Направление вектора![]() от точкиСк точкеВ.
от точкиСк точкеВ.
Затем проводим
линию действия ускорения
![]() из полюса
из полюса![]() параллельно направляющей
параллельно направляющей![]() и линию действия ускорения
и линию действия ускорения![]() из конца вектора
из конца вектора![]() перпендикулярно шатуну 2. Точка пересечения
перпендикулярно шатуну 2. Точка пересечения![]() этих линий отсекает отрезки
этих линий отсекает отрезки![]() и
и![]() ,
по которым с учетом масштаба
,
по которым с учетом масштаба![]() построенияплана
ускорений определяем
величину ускорений
построенияплана
ускорений определяем
величину ускорений
![]() и
и![]()
![]()
![]()
Угловое ускорение шатуна 2 равно
![]()