

matmod
.pdfЛ.2. Типы математических моделей
Пример 1 (продолжение).
Математическая (структурная) модель рассматриваемой задачи:
x1 = 0, x˙1 = v, |
|
|
x2 = 0, |
|
x˙2 = 0 (t = 0), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
m1x¨1 + k1x1 = 0, |
|
|
|
m2(¨x1 + x¨2) + k2x2 = 0 (0 ≤ t ≤ T ). |
|||||||||||||||||||||||||||||||||||
Решение системы ОДУ: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
x1 = ω1 |
|
sin ω1t |
|
|
|
|
ω1 = r |
|
m1 |
|
, |
T = |
ω1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
k1 |
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
ω12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
v |
|
|
sin ω2t |
|
− |
|
sin ω1t |
|
|
|
|
|
r |
k2 |
|
|
|
|
|
|||||||||||||||||
|
|
ω12 |
|
− ω22 |
|
|
ω2 |
|
|
|
ω1 |
|
|
|
|
|
|
m2 |
|
|
|
|
|||||||||||||||||
x2 = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω2 = |
|
|
|
|
|
. |
|
|
|
|
||||||||||
При t = T : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ω12 |
|
|
v |
|
|
|
ω2 |
π, x˙ |
2(T ) = |
|
|
ω12 |
|
|
1 + sin |
|
|
ω2 |
|
|
||||||||||||||||||
|
ω12 − ω22 |
|
ω2 |
|
|
ω1 |
|
ω12 − ω22 |
|
|
ω1 |
|
|||||||||||||||||||||||||||
x2(T ) = |
|
|
|
sin |
|
|
|
|
|
|
|
|
v |
|
|
|
|
π . |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2014 |
21 / 74 |
||||||

Л.2. Типы математических моделей
Пример 1 (продолжение).
Из сохранения энергии колебательной системы:
|
|
k2 |
2 |
|
|
k2 |
2 |
|
|
m2 |
2 |
|
|
|
|
v2 |
|
|
|
ω12 |
|
|
2 |
|
|
2 πω2 |
|
|
||||||||
|
|
|
A |
|
= |
|
|
x2 |
(T ) + |
|
(x˙2) (T ) = 2k2 |
|
|
|
cos |
|
|
|
. |
|||||||||||||||||
|
|
2 |
|
2 |
2 |
ω22 |
ω12 − ω22 |
|
|
2ω1 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
ω12 |
|
|
|
|
|
πω2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω2 |
|
ω12 |
− ω22 |
|
|
|
2ω1 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
A = hv, |
h = |
|
|
|
|
|
|
cos |
|
. |
|
|
|
|
|
|
|
|
|
|
|||||
Для m1 = 10 |
4 |
кг, m2 = 200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
Н/м: |
||||||||||||||
|
|
кг, k1 = 9.8 10 |
|
Н/м, k2 = 1.96 |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
5 |
|
|
|
|
|
|
|
|
|
× |
|
5 |
|
|
||
h |
|
|
|
|
|
|
−3 |
с, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
= 1.79 × 10 |
|
|
− |
3v (м/с). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
A (м)= 1.79 × 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Последнюю формулу можно рассматривать как функциональную |
|
|
||||||||||||||||||||||||||||||||||
модель. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ее можно получить методом идентификации математической |
|
|
|
|||||||||||||||||||||||||||||||||
модели: определением параметров после выбора схемы модели. |
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2014 |
|
22 / 74 |
|||
Л.2. Типы математических моделей
Дискретные и непрерывные модели
Модели – как содержательные, так и математические – могут быть
 дискретными,
дискретными,
 непрерывными,
непрерывными,
 смешанными.
смешанными.
Между этими типами нет принципиального барьера и при уточнении или видоизменении модели дискретная картина может стать непрерывной и обратно; то же может произойти в процессе решения математической задачи
При составлении математической модели, а также при выборе метода ее исследования надо учитывать возможность применения как “дискретного”, так и “непрерывного” аппаратов
2014 |
23 / 74 |

Л.2. Типы математических моделей
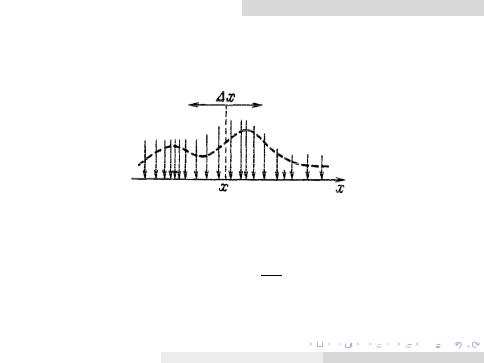
Пример 2. Изучается прогиб балки от груза, расположенного на интервале сравнительно малой длины.
Замена распределенного груза сосредоточенным
Пусть q(x) – плотность распределения груза на малом интервале (l), расположенном вблизи x = a.
R
Q = (l) q(x)dx – груз, сосредоточенный в точке.
q(x) ↔ q˜(x) = Qδ(x − a)
 Подход дает возможность в случае сосредоточенной нагрузки пользоваться формулами, выведенными для нагрузки распределенной;
Подход дает возможность в случае сосредоточенной нагрузки пользоваться формулами, выведенными для нагрузки распределенной;
 целесообразен, если конкретный вид функции q(x) нам неизвестен, но суммарное значение Q мы знаем.
целесообразен, если конкретный вид функции q(x) нам неизвестен, но суммарное значение Q мы знаем.
 Переход к дискретной модели нагрузки можно совершить, если имеется несколько грузов, каждый из которых распределен на малом интервале.
Переход к дискретной модели нагрузки можно совершить, если имеется несколько грузов, каждый из которых распределен на малом интервале.
2014 |
24 / 74 |
Л.2. Типы математических моделей
Пример 2 (продолжение).
Пусть грузов, замененных на сосредоточенные, много. Тогда может оказаться удобнее перейти к непрерывной модели нагрузки.
Эта плотность получается с помощью осреднения исходного распределения:
q(x) = q(x; x) = 1x Q(x; x).
Эпюра плотности нагрузки зависит от выбора интервала осреднения x. Он должен быть велик по сравнению с характерным расстоянием между грузами, но мал по сравнению с общей длиной балки. 






2014 25 / 74

Л.2. Типы математических моделей
Аналогичная процедура осреднения происходит при переходе
 от среды, состоящей из отдельных частиц к сплошной среде, параметры которой (плотность, температура и т. п.) распределены по пространству;
от среды, состоящей из отдельных частиц к сплошной среде, параметры которой (плотность, температура и т. п.) распределены по пространству;
 от поезда с дискретными вагонами к его непрерывной модели;
от поезда с дискретными вагонами к его непрерывной модели;
 от воздействия на систему, имеющего характер частых подталкиваний, к непрерывно действующей силе и т. д.
от воздействия на систему, имеющего характер частых подталкиваний, к непрерывно действующей силе и т. д.
Осреднение применяется не только для перехода от дискретной модели к непрерывной, но также и для упрощения быстро колеблющихся зависимостей в непрерывных моделях.
2014 |
26 / 74 |

Л.2. Типы математических моделей
Внесение возможных неадекватностей при переходе дискретная ↔ непрерывная модель (Пример 3).
Пример 3. Продольные свободные упругие колебания прямолинейного однородного стержня.
u = u(x, t) – смещение в момент t сечения с координатой , отсчитываемой вдоль стержня.
∂2u |
= a |
2 |
∂2u |
, |
a |
2 |
= E /ρ |
|
|
||||||
∂t2 |
|
∂x2 |
|
||||
|
|
|
|
|
|
Заменим непрерывную модель на дискретную: последовательность с шагом h материальных точек массы m = ρSh, соединенных пружинами нулевой массы и жесткости k = SE /h.
2014 |
27 / 74 |

Л.2. Типы математических моделей
Пример 3 (продолжение).
ui (t) – смещение i-й точки.
Из второго закона Ньютона получаем систему ОДУ:
m |
d2ui |
= k(ui+1 − ui ) − k(ui |
− ui−1) |
||||
dt2 |
|||||||
или |
|
d2ui |
= a2 |
ui+1 − 2ui + ui−1 |
|
||
|
dt2 |
|
|||||
|
|
|
|
h2 |
|
|
|
Замечание: ∂2u/∂x2 (непр. мод.) → симметричная разделенная разность второго порядка.
2014 |
28 / 74 |
Л.2. Типы математических моделей
Пример 3 (продолжение).
Обратный переход от дискретной модели к непрерывной:
ui+1 = u(xi , t),
|
|
|
|
|
|
′ |
|
|
h2 ′′ |
|
ui±1 = u(xi ± h, t) = u(xi , t) ± hux (xi , t) + |
|
|
uxx (xi , t) + . . . |
|||||||
|
2 |
|||||||||
|
ui+1 − 2ui + ui−1 |
→ |
u′′ |
(x |
, t) + |
O |
(h) (h |
→ |
0). |
|
|
h2 |
|||||||||
|
xx |
i |
|
|
|
|||||
 Решение системы ОДУ (дискретная модель) при малом h хорошо имитирует решение уравнения частных производных.
Решение системы ОДУ (дискретная модель) при малом h хорошо имитирует решение уравнения частных производных.
 Проверка выполнения в модели математических аналогов фундаментальных физических законов (например, закон сохранения энергии) является важным этапом контроля качественной адекватности модели.
Проверка выполнения в модели математических аналогов фундаментальных физических законов (например, закон сохранения энергии) является важным этапом контроля качественной адекватности модели.
2014 29 / 74

Л.2. Типы математических моделей
Пример 3 (продолжение).
Проверка закона сохранения энергии E для стержня конечной длины ℓ, жестко закрепленного на концах (u|x=0,ℓ = 0, ut′ |x=0,ℓ = 0).
Непрерывная модель.
1 |
|
ℓ |
|
|
1 |
|
ℓ |
|
|
|
|
ρ |
|
ℓ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Z0 |
′ |
|
Z0 |
|
′ |
|
|
Z0 |
|
|
′ |
|
|
|
|
′ |
|
|
|
|
|
||||||||||||
|
E = |
|
|
ρ(ut )2dx + |
|
|
|
E (ux )2dx |
= |
|
|
h(ut )2 |
+ a2 |
(ux )2idx |
||||||||||||||||||||
2 |
2 |
2 |
|
|||||||||||||||||||||||||||||||
Дифференцируем по параметру (t): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
∂t |
|
|
|
|
ℓ |
h |
t tt |
|
|
|
x xt i |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
2 Z0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
∂E |
= |
ρ |
|
|
2u′ u′′ + 2a2u′ u′′ |
dx |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Используя уравнение utt′′ = a2uxx′′ , получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
∂t |
ℓ |
t xx |
x xt |
|
ℓ |
|
|
|
x t |
|
|
|
|
|
|
|
x t |
|
|
0 |
|
||||||||||||
|
Z0 |
|
Z0 ∂x |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
∂E = ρa2 |
|
h |
|
|
|
|
i |
|
|
|
∂ |
|
u′ u′ |
|
|
|
|
|
|
|
|
u′ |
|
ℓ |
|||||||||
|
|
u′ u′′ + u′ u′′ dx = E |
|
|
dx = E u′ |
|
|
= 0 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2014 |
30 / 74 |
|||||