

6.3. Скольжение стебля при защемлении его между лезвиями сегмента и вкладыша.
Рассмотрим скольжение стебля при возможности защемления
![]()
![]()
![]()
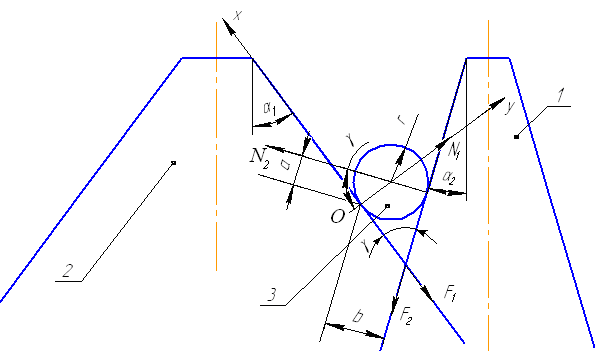
Нож; 2. Сегмент; 3. Стебель
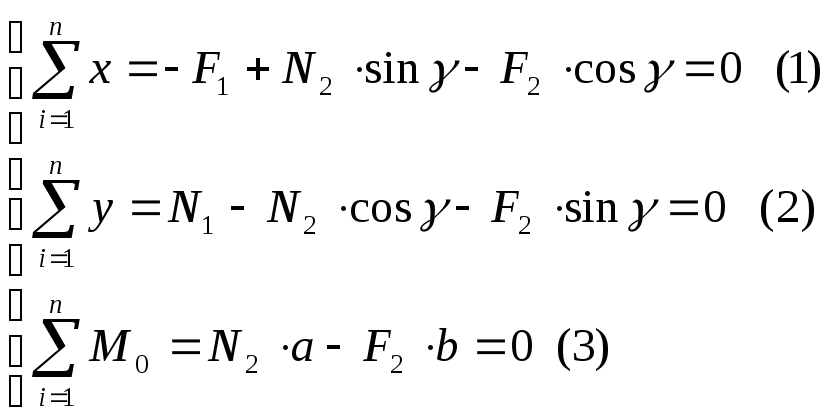
Для того чтобы было равновесие стебля в растворе между лезвиями необходимо, чтобы суммы проекций на оси Х и У были равны 0 и суммы моментов относительно произвольной точки Oдля сил, действующих на стебель были равны 0.
![]()
![]() и
и
![]() -
нормальные реакции, действующие со
стороны лезвия на стебель.
-
нормальные реакции, действующие со
стороны лезвия на стебель.
![]() и
и
![]() -
силы трения, предупреждающие выскальзывание.
-
силы трения, предупреждающие выскальзывание.
r- радиус стебля.
При каких значениях
угла
![]() будут обеспечены условия равновесия
(его не выскальзывание).
будут обеспечены условия равновесия
(его не выскальзывание).
Вместо
![]() и
и![]() в (1) подставим их значения:
в (1) подставим их значения:
![]()
![]() (1)
(1)
Вместо
![]() в (2) подставим его значение:
в (2) подставим его значение:
![]() (2)
(2)
Приравнивая
уравнения (1) и (2) и домножив обе части
на
![]() ,
получим:
,
получим:
![]()
![]()
![]()
![]() - 1 условие.
- 1 условие.
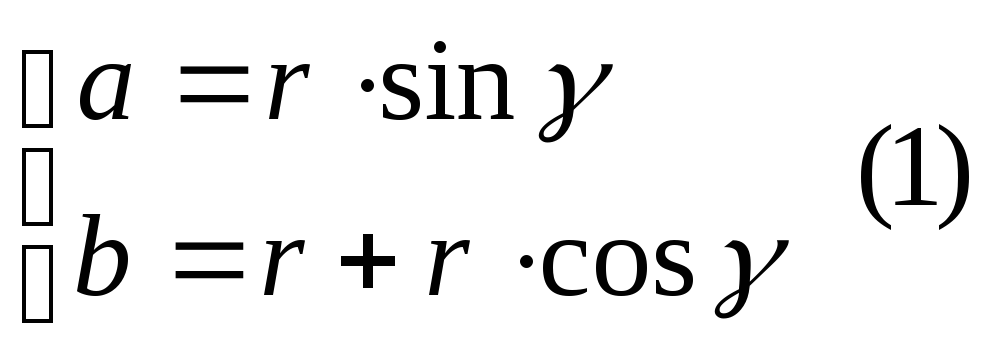
Подставим уравнение (1) в сумму моментов (3):
![]()
![]()
Умножим на
![]() и получим:
и получим:
![]()
![]()
![]() - 2 условие.
- 2 условие.
Если
![]() ,
то оба условия дают
,
то оба условия дают![]() -
условие статики.
-
условие статики.
ЛЕКЦИЯ 7.
7.1. Площадь подачи и нагрузка на лезвие сегмента режущего аппарата.
![]()
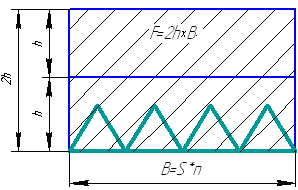
Площадь, скошенная одним сегментом:
![]()
![]() ,
,
где S- ход ножа;
n- число сегментов;
h- подача.
Площадка, описанная
точкой О1по площади![]() (синусоидальный
(синусоидальный
![]() ).
).
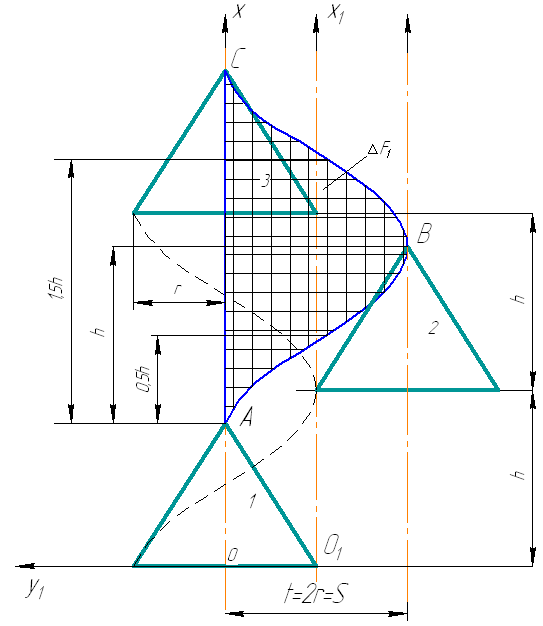
Уточним. Запишем уравнение косинусоиды см. (5.6):
![]() .
.
Перенесём ось ОХ на величину rвлево в т.О1:
![]()
Тогда:
![]() .
.
Обозначим
заштрихованную площадку-![]() .
.
![]()
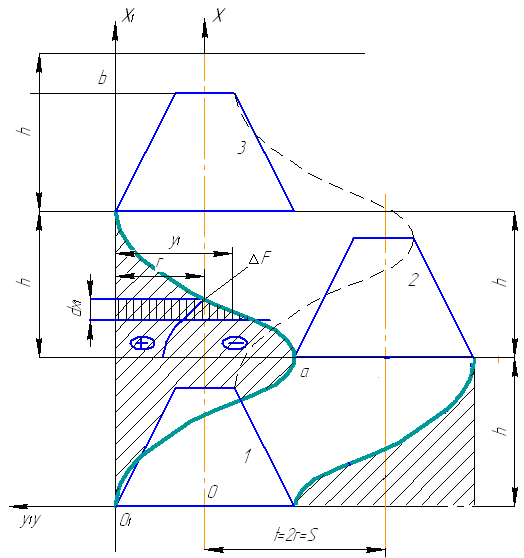
Рис 7.2. К определению площади срезаемой одним лезвием
Эта площадка равна площади, срезаемой одним лезвием.
7.2. Режущий аппарат низкого резания.
Нагрузка в аппаратах низкого резания на каждый из пальцев будет различной.
Для режущего аппарата низкого резания имеем:
![]()
![]() .
.
Количество стеблей,
срезаемое у пальца:
![]() ,
,
где
![]() -
коэффициент, показывающий степень
густоты расположения стеблей на 1 кв.м.
-
коэффициент, показывающий степень
густоты расположения стеблей на 1 кв.м.![]()
![]() -
срезаемая площадка.
-
срезаемая площадка.
7.3. Сопротивление в режущем аппарате.
Нагрузка на спинку ножа приходится от следующих усилий:
![]() ,
,
где
![]() -
усилие от среза стеблей сегментами
режущего аппарата (среднее значение);
-
усилие от среза стеблей сегментами
режущего аппарата (среднее значение);
![]() -
усилие, связанное с ускорением массы
ножа;
-
усилие, связанное с ускорением массы
ножа;
![]() -
усилие трения, обусловленное весом ножа
и действием прижимов на спинку ножа.
-
усилие трения, обусловленное весом ножа
и действием прижимов на спинку ножа.
 ,
,
где
![]() ср-
работа среза травы или стеблей за один
полуоборот кривошипа;
ср-
работа среза травы или стеблей за один
полуоборот кривошипа;
![]() -
путь сегмента в процессе от начала
резания лезвия до конца резания.
-
путь сегмента в процессе от начала
резания лезвия до конца резания.
![]() ,
,
где
![]() -
работа среза 1 м2травы или стеблей
(даётся в справочниках).
-
работа среза 1 м2травы или стеблей
(даётся в справочниках).
 .
Оно несколько выше силы трения, так как
есть сцепление и другие факторы.
.
Оно несколько выше силы трения, так как
есть сцепление и другие факторы.
Заметим, что х во вращательном движении изменяется по синусоидальному закону
Если нам известны
![]() ,
,![]() ,
,![]() ,
то можем построить график
,
то можем построить график![]() .
.
Заштрихованный
график - есть график общего усилия ножа
![]() .
.
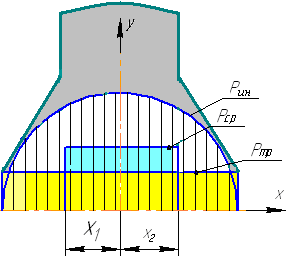
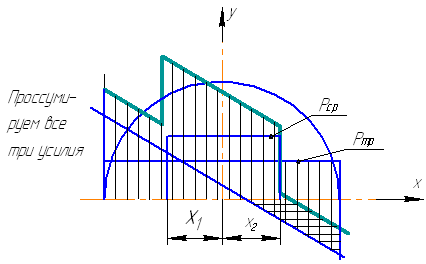
За счёт сил инерции мы имеем два максимума положительный и отрицательный (показана первая половина)
За счёт сил инерции мы имеем два максимума положительный и отрицательный (показана первая половина)
Л8.
ЛЕКЦИЯ 8. КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА РЕЖУЩЕГО АППАРАТА
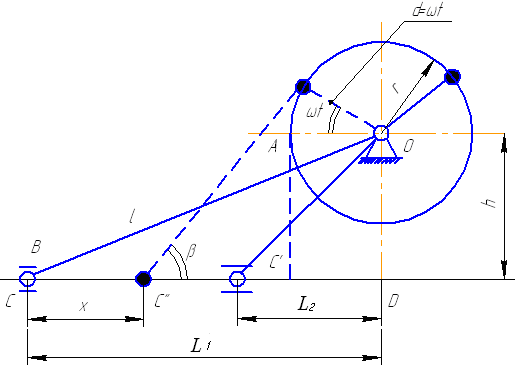
![]() - механизм аксиальный;
- механизм аксиальный;
![]() - механизм
дизаксиальный;
- механизм
дизаксиальный;
h– дизаксиал;
r– радиус кривошипа;
АВ– шатун;
С– ползун (нож режущего аппарата);
![]() - ход ножа.
- ход ножа.
![]() →Величина хода
→Величина хода
![]()
![]()
![]() нас интересует х,как функция
нас интересует х,как функция![]()
![]()
![]()
![]()
Запишем этот корень как функцию и разложим в ряд Тейлора
![]()


![]()
![]()
![]()
Умножим на – l
1.
![]()
Это выражение
показывает, что движение не является
синусоидальным, а более сложным. Возьмем
производную![]()
2.
![]()
![]()
3.
![]()
1 – путь; 2 – скорость; 3 – ускорение.
Если в уравнениях
(1,2,3) дать h=0,
полученное движение аксиального
механизма, если положениеh=0,
а![]() ,
то получим закон для движения ножа.
,
то получим закон для движения ножа.
1-2-3 – общие формулы движения ножа, из которого можно получить любые частные формулы.