

Архив2 / курсовая docx525 / kursovaya_el_tekh
.docxМосковский государственный строительный университет Кафедра электротехники и электропривода Курсовая работа <<Расчёт и выбор электродвигателя и электрических аппаратов управления электропривода строительного башенного крана>>
МиАС 3-1 (полный номер группы)
Зятик Сергей Игоревич (фамилия ,имя, отчество студента)
А-20 (полный код расчётного варианта)
Выполнил << >> 2012г.
Подпись студента Сдано на кафедру<< >> 2012г. Проверил<< >> 2012г.
Фамилия преподавателя Данилов-Нитусов (подпись) Согласно варианту А-20 задания на курсовую работу определены следующие исходные данные для выбора электродвигателя и аппаратов управления электропривода строительного крана: Электродвигатель серии 4MTF или 4MTH Продолжительность включения расчётная ПВр=40% Номинальная грузоподъёмность крана Qном=8,Т=8000,кг Номинальная скорость подъёма груза Vг.ном=0,32, м/с Кратность полиспаста iп=4 Диаметр барабана лебёдки с канатом, намотанным в один слой, Dб=0,32,м Суммарный КПД механизма ɳ=0,8 В расчётах используются исходные данные и данные , получаемые в ходе выполнения работы.
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ МЕХАНИЗМА ПОДЪЁМА ГРУЗА
1.
Расчёт натяжения идущей на канатный
барабан лебёдки ветви каната Sб
при подъёме номинального груза:
Sб=
 =
= =26,487
,(кH)
=26,487
,(кH)
ɳп=
 =
= ,где
к=1,05; g=9,81
,(м/
,где
к=1,05; g=9,81
,(м/ ),
ɳ=0,7, ɳтм=0,9
),
ɳ=0,7, ɳтм=0,9
2. Определение скорости навивки каната на барабан:
Vк=Vг.ном*iп=0,32*4=1.28 ,(м/с).
3.
Расчёт мощности электродвигателя
(расчётной, требуемой):
Pр= =
= =41,4374
,(кВт)
,где Kн=1,1.
=41,4374
,(кВт)
,где Kн=1,1.
4.
Определение частоты вращения барабана:
nб= =
= =76,4331 , (
=76,4331 , ( )
)
Выбираем двигатель Паспортные данные
Рном=45,
кВТ
nном=576,
( )
Ток
статора= 103, А
cosᵩ=0.76
I2ном=146,А-ток
ротера
Е2н=181,В
Ммах=1940,Н*М
)
Ток
статора= 103, А
cosᵩ=0.76
I2ном=146,А-ток
ротера
Е2н=181,В
Ммах=1940,Н*М
Расчётные данные
I10=57.8,А
cosᵩ0=0,08
R1=0.06,
Ом
Х1=0,21, Ом
R2=0.027,Ом
 =3,72
Х2=0,0645,Ом
=3,72
Х2=0,0645,Ом
5.Расчёт
передаточного числа редуктора.
ip= =
= =7,536
=7,536
6.Расчёт статического момента сопротивления на валу канатного барабана.
Мсб=Sб* =
26,487*
=
26,487* =4,2379,кН*м
=4,2379,кН*м
7.Расчёт
статического момента сопротивления
движению, приведённого к валу
электродвигателя.
Мс=Мсб* =4,2379*
=4,2379* =0,6248,кН*м
= 624,8,Н*м
=0,6248,кН*м
= 624,8,Н*м
Расчёт симметричного пускорегулирующего реостата.
8.Номинальный момент вращения
Мном= =
= =746,0938,
Н*м
=746,0938,
Н*м
9.Коэффициент перегрузочной способности
λ= =
= =2,6002
=2,6002
10.Частота вращения магнитного поля электродвигателя (синхронная скорость)
n1= =
= =600,
об/мин
р- число пар полюсов
=600,
об/мин
р- число пар полюсов
11.Номинальное скольжение
Sном= =
= =0,04
=0,04
12.Номинальное расчётное сопротивление
R2ном= =
= =0,71576,
Ом
=0,71576,
Ом
13.Активное сопротивление фазы обмотки ротора при номинальном скольжении.
R2=R2ном*Sном=0,71576*0,04=0,0286, Ом
14.Коэффициент трансформации ЭДС
Из
данных
 =3,72
=3,72
 =
= =1,92873
=1,92873
15. Критическое скольжение при работе на естественной механической характеристике.
Sкр= =
= =0.234
=0.234
Расчёт реостата
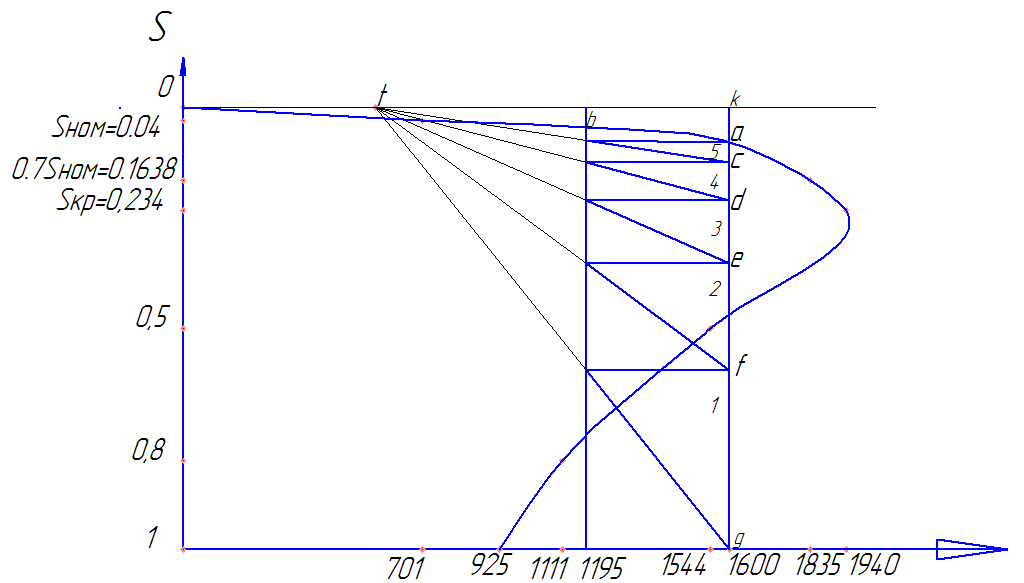
16.Расчёт механической характеристики электродвигателя по формуле Клосса.
При S=Sном
М=Ммах* =1940*
=1940* =701,Н
=701,Н
q=2* =2*
=2* *0,234=0,2639
*0,234=0,2639
При S=Sкр*0,7
М=Ммах* =1940*
=1940* =1835,Н
=1835,Н
При S= Sкр
М=Ммах* =1940*
=1940* =1940,Н
=1940,Н
При S=0,5
М=Ммах* =1940*
=1940* =1544,Н
=1544,Н
При S=0,8
М=Ммах* =1940*
=1940* =1111,Н
=1111,Н
При S=1
М=Ммах* =1940*
=1940* =925,Н
=925,Н
Таблица вычислений М
|
S |
0 |
Sном |
Sкр*0,7 |
Sкр* |
0,5 |
0,8 |
1 |
|
М,Н*м |
0 |
701 |
1835 |
1940 |
1544 |
1111 |
925 |
Пиковый (максимальный пусковой) момент Ммах
М1=(0,75…0,85)*Ммах=(0,75…0,85)*1940=1455…1649,
Н*м
 М
ak=7.95,мм
de=43.33,мм
ac=4,56,мм
ef=24.1,мм
cd=8.52,мм
fg=40.53,мм
17.
Добавочные сопротивления
rдоб1=r2*
М
ak=7.95,мм
de=43.33,мм
ac=4,56,мм
ef=24.1,мм
cd=8.52,мм
fg=40.53,мм
17.
Добавочные сопротивления
rдоб1=r2* =0.0286*
=0.0286* =0.1458,
Ом
rдоб2=r2*
=0.1458,
Ом
rдоб2=r2* =0.0286*
=0.0286* =0.086699,
Ом
rдоб3=r2*
=0.086699,
Ом
rдоб3=r2* =0.0286*
=0.0286* =0.051552,
Ом
rдоб4=r2*
=0.051552,
Ом
rдоб4=r2* =0.0286*
=0.0286* =0.0306506,
Ом
rдоб5=r2*
=0.0306506,
Ом
rдоб5=r2* =0.0286*
=0.0286* =0.030650566,
Ом
=0.030650566,
Ом
18.Полные сопротивления цепи ротора при различных ступенях реостата определяются по формулам.
Rp1= rдоб1+ rдоб2+ rдоб3+ rдоб4+ rдоб5+r2= =0.1458+0.086699+0.051552+0.0306506+0.030650566+0,0286= =0.3597061, Ом
Rp2= rдоб2+ rдоб3+ rдоб4+ rдоб5+r2= =0.086699+0.051552+0.0306506+0.030650566+0,0286=0,2139061,Ом
Rp3= rдоб3+ rдоб4+ rдоб5+r2= =0.051552+0.0306506+0.030650566+0,0286=0,127207128, Ом
Rp4= rдоб4+ rдоб5+r2=0.0306506+0.030650566+0,0286=0,75655,Ом
Rp5= rдоб5+r2=0.030650566+0,0286=0,045,Ом
Расчёт добавочного сопротивления в цепи ротора для режима динамического торможения с независимым возбуждением.
19.Напряжение на выходе трёхфазного двухполупериодного выпрямителя.
Ud0=1.35U2л= =
= =270,В
Принимаем
к12=1,9
=270,В
Принимаем
к12=1,9
U1л,U2л- первичное и вторичное линейное напряжение понижающего трёхфазного трансформатора.
20.
Долевой момент сопротивления
 =
= =
= =0,8374,
Н*м
=0,8374,
Н*м
21.Долевая скорости
 =
= =
= =0.1
,об/мин
=0.1
,об/мин
22.Тормозной момент в режиме динамического торможения
 =(1,3…1,6)*
=(1,3…1,6)* =(1,3…1,6)*0,8374=1,08862…1,33984,
Н*м
=(1,3…1,6)*0,8374=1,08862…1,33984,
Н*м
23.Долевое
(относительное) полное активное
сопротивление цепи ротора
 в режиме динамического торможения
определяется по формуле.
в режиме динамического торможения
определяется по формуле.
 =
= =0,4,
Ом
=0,4,
Ом
 полное
активное сопротивление цепи ротора в
режиме динамического
торможения.
Iв=Ki*I10=2*57.8=115.6
,А
полное
активное сопротивление цепи ротора в
режиме динамического
торможения.
Iв=Ki*I10=2*57.8=115.6
,А
 =
= *
* =0,4*0,71576=0,286304,
Ом
=0,4*0,71576=0,286304,
Ом
24.
Определение полного расчётного
сопротивления цепи возбуждения.
Rв= =
= =2,2244,
Ом
1.05-коэффициент учитывает возможность
снижения напряжения в цепи электропитания
крана (колебания напряжение сети)
=2,2244,
Ом
1.05-коэффициент учитывает возможность
снижения напряжения в цепи электропитания
крана (колебания напряжение сети)
25. Рассчитываем добавочное сопротивление в цепи возбуждения rв=Rв-2r1=2.2244-2*0.06=2.1044, Ом
2r1-активное сопротивление двух обмоток статора, к которым последовательно подано выпрямленное постоянное напряжение Uд0.
26. Определение сопротивления реостата в цепи ротора для режима динамического торможения.
rдт= -2r2=0.286304-2*0,0286=0,229104,
Ом
-2r2=0.286304-2*0,0286=0,229104,
Ом
r2-активное сопротивление одной фазы ротора при номинальном скольжении rдт- добавочное сопротивление в цепи ротора; определяет искусственную механическую характеристику при динамическом торможении. Расчёт сопротивления реостата в цепи ротора для режима динамического торможения rдт производят при условии, что основной пускорегулирующий реостат rрс замкнут накоротко, по формуле rрс= rдоб1+ rдоб2+ rдоб3+ rдоб4+ rдоб5=0 Введением сопротивления пускорегулирующего реостата можно регулировать величину малой посадочной скорости спуска грузов различного веса.
Выбор аппаратов управления и защиты.
Выбор аппаратов коммутации электрических цепей ( контакторов) При выборе контактора для цепи статора электродвигателя КМ1 должно выполниться условие Iкт > I1ном
Iкт- номинальный ток продолжительного режима работы контактора I1ном-номинальный ток статора электродвигателя Контактор постоянного тока КМ2 для цепи возбуждения выбирается из аналогичных условий.
Для цепи ротора электродвигателя (N контакторов в пусковом режиме и контактор КМ3 в режиме динамического торможения) должно выполняться общее условие.
Км2, Км3-6022 Км6, Км7, Км8,Км9-6022 Км10-6022 Км4-603 Км5-6023 Кт1-603
Выбор реле максимального тока.
Реле максимального тока предназначено для защитного отключения цепи статора электродвигателя при токах статора превышающих номинально значение Выбор реле осуществляется по двум условиям:
-
По допустимому току Iк.доп
 I1ном
Iк.доп-
допустимый ток катушки, указанный в
каталоге данного типа реле максимального
тока.
I1ном
Iк.доп-
допустимый ток катушки, указанный в
каталоге данного типа реле максимального
тока. -
По току срабатывания реле Iср=(1,6…2,25)*I1ном=(1,6…2,25)*103=164,8…231,75 ,А
Выбираем 2ТД.304.0.96-10
Выбор тормозного устройства
Условием выбора колодочного тормоза с приводом от электромагнитов является следующее:
Мт=Кз.т* =2*
=2* =584,88,Н*м
=584,88,Н*м
Кз.т-коэффициент запаса тормоза
94-коэффициент, учитывающий различия в системах единиц.
Выбираем КМТ4А