Документ Microsoft Word
.docx-
Основные плоскости для ориентирования в море. Система деления плоскости истинного горизонта. Истинный: курс, пеленг, обратный истинный пеленг, курсовой угол.
Основные плоскости и линии для ориентирования в море
В каждой точке земной поверхности наблюдатель имеет вполне определенные направления, указываемые ему его отвесной линией, верх которой определяется зенитом - Z, а низ - надиром п.
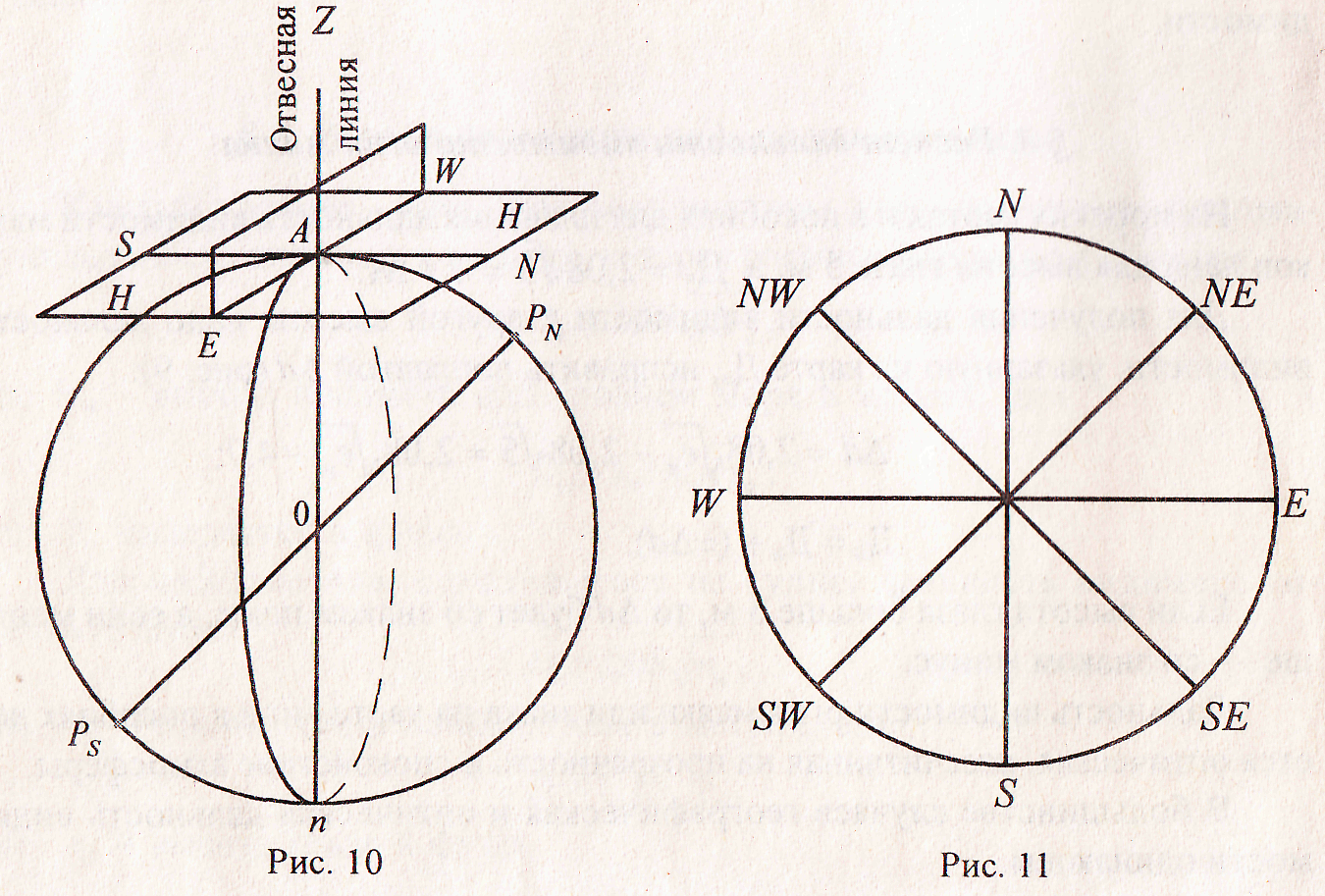
Пусть на земной поверхности (рис. 10) в точке А находится наблюдатель. Линия Аn - отвесная его линия, тогда НН, перпендикулярная к отвесной линии, будет плоскость истинного горизонта наблюдателя. РN и РS -географические полюсы. Окружность PNAPSn большого круга, проходящая через полюсы и через место наблюдателя А, есть истинный меридиан или меридиан наблюдателя, который, пересекаясь с плоскостью НН, определяет два главных направления там, где Pn-N, Ps-S
Вертикальная плоскость, перпендикулярная плоскости истинного меридиана, называется плоскостью первого вертикала, которая, пересекаясь с плоскостью истинного горизонта, определяет еще два главных направления. Для наблюдателя, стоящего лицом к N, — справа Е (восток), слева W (запад).
Таким образом, плоскость истинного горизонта, хранителем которой на судне является картушка компаса, обрела главные направления –N, E, S, W, а затем и четвертные - NE, SЕ, SW, NW (рис. 11).
Системы деления плоскости истинного горизонта
Румбовая система. В отдаленные времена с целью более точного обозначения направлений каждую четверть горизонта делили на 8 частей, и таким образом весь горизонт был разделен на 32 направления, названные румбами, один из которых равен 111/4. Таким образом, картушка компаса была поделена: на 4 главных румба N, Е, S, W; 4 четвертных NE, SЕ, SW, NW и 6 промежуточных в каждой четверти. Каждый румб имеет свое наименование; например, румбы первой четверти — N, NtE, NNE, NEtN, NE, NEtE, ENE, EtN (рис. 12).
Четвертная система. С развитием точности судовождения каждая четверть горизонта была разделена на 90 частей с ценой деления, равной 1 °0, причем счет градусов велся от направлений N и S к направлениям Е и W от 0° до 90° в NE и SW четвертях по часовой стрелке, а в SE и NW -против. Курс судна задавался с указанием наименования четверти и числа градусов. Например, NE450, SE60°, SW5°, NW72°.
Круговая система. В начале XIX столетия горизонт начали делить на 360°, считая от N по часовой стрелке. Кроме градусной меры сохранены главные и четвертные румбы, которые стали необходимостью только для определения направлений ветра, течения.
Судоводителю в его практической деятельности приходится при решении навигационных и астрономических задач, связанных с использованием различных таблиц, переходить от круговой системы счета направлений к четвертной и наоборот.

Истинный курс, истинный пеленг и курсовой угол
Судоводителю при решении различных навигационных задач приходится иметь дело с двумя основными направлениями - направлением движения судна и направлением на какой-либо наземный предмет или небесное светило.
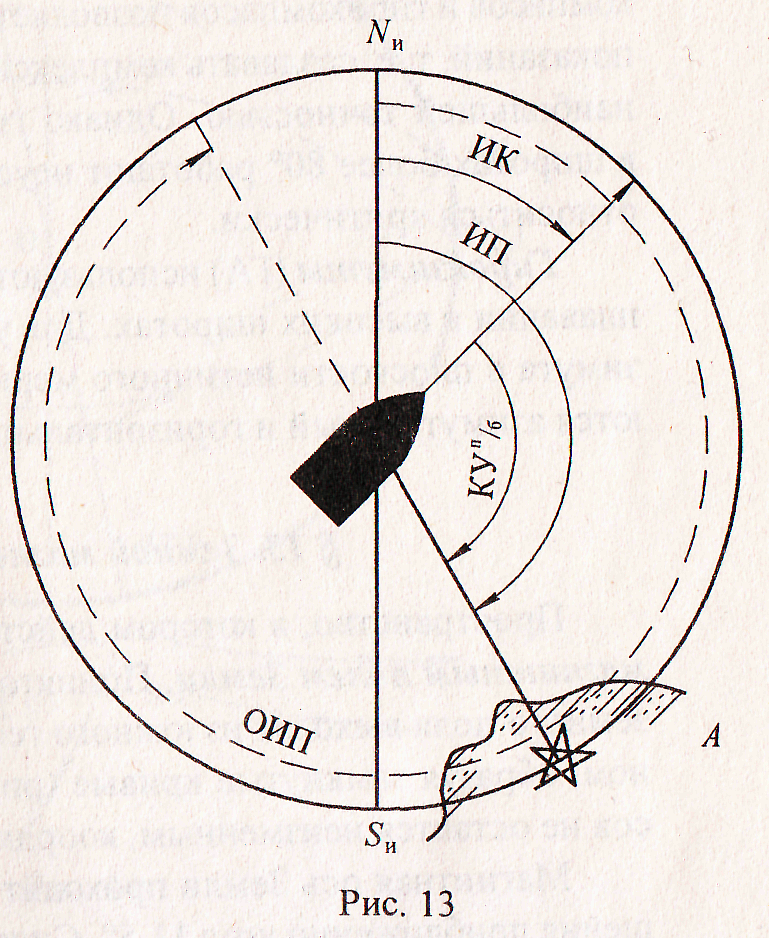
Истинным курсом (ИК) называется угол, заключенный между истинным меридианом и диаметральной плоскостью судна (ДП) (рис. 13).
Измеряется от N-й части истинного меридиана по часовой стрелке от 0° до 360°.
Истинным пеленгом (ИП) называется угол, заключенный между истинным меридианом и направлением на предмет. Измеряется от N-й части истинного меридиана по часовой стрелке от 0° до 360°. Обратный ИП равен ОИП = ИП±180°.
Направлением в данном случае является плоскость, проходящая через глаз наблюдателя, предметную мишень пеленгатора и наблюдаемый предмет. Такая плоскость называется визирной.
Курсовым углом (КУ) называется угол, заключенный между диаметральной плоскостью судна и направлением на предмет. Измеряется от носовой части ДП судна до направления на предмет от 0° до 180°, поэтому КУ бывают правого борта и левого борта. Причем для алгебраических расчетов КУп/б присваивается знак «+», а КУ л/б — знак «-».
КУ, равный 90°,0, называется траверзом.
Курсовые углы измеряются по азимутальному кругу компаса.Связь ИК, ИП и КУ определяется формулой:
ИП = ИК + (±КУ).