


Научный аспект |
№9 2023 |
том 7 |
|
|
|
УДК 517.977.5
Исследование динамических особенностей беспилотного аппарата
Смирнова Мария Александровна
кандидат физико-математических наук, старший преподаватель Санкт-Петербургского государственного университета
Смирнов Михаил Николаевич
кандидат физико-математических наук, доцент Санкт-Петербургского государственного университета
Аннотация: Данная статья посвящена исследованию динамических особенностей беспилотного подводного аппарата. К таким особенностям относятся устойчивость, управляемость, наблюдаемость, робастность и чувствительность. Информация об этих особенностях необходима для разработки и создания систем автоматического управления движением беспилотными аппаратами, позволяющих выполнять различные задачи. К таким задачам относятся оценка состояния береговой зоны Финского залива, мониторинг береговых зон и участков дна акватории, проведение анализа состояния берегозащитных комплексов, накоплению информации для отслеживания указанных процессов в динамике, а также множество других задач. Для выполнения исследования динамических особенностей аппарата были созданы математическая и компьютерная модели системы автоматического управления движением, также было проведено компьютерное моделирование.
Abstract: This paper is devoted to the study of the dynamic features of an unmanned underwater vehicle. These features include stability, controllability, observability, robustness, and sensitivity. Information about these features is necessary for the design and development of automatic motion control systems for unmanned vehicles to perform various tasks. Such tasks include assessment of the Gulf of Finland coastal zone condition, monitoring of coastal zones and water area bottom areas, analyzing the condition of coastal protection complexes, accumulation of information for tracking changes of these processes, as well as many other tasks. To perform the research of dynamic features of the vehicle, mathematical and computer models of the automatic motion control system were created. Computer modeling was also carried out.
Ключевые слова: управление, моделирование, беспилотный, объект управления, морской.
Keywords: control, modeling, autonomous, control object, marine.
782 |
na-journal.ru |

Информационные технологии
В связи с высоким распространением и важностью различного рода беспилотных аппаратов необходимо подходить к задаче формирования автоматического управления комплексно — требуется совершенствовать не только сами беспилотные аппараты на уровне производства, но и методы управления ими в различных условиях внешней среды. В настоящее время известны различные виды законов управления [1–12], однако их успешное применение зависит в том числе от качества математической модели. Поэтому необходимо тщательно исследовать и учитывать динамические особенности объектов управления.
Рассмотрим беспилотный подводный аппарат, внешний вид которого представлен на рис. 1. Он способен развивать скорость до 3,5 узлов и питается от шести 12 вольтовых перезаряжаемых свинцово-кислотных батарей. Время работы около 4 часов на максимальной скорости, 20 часов — на минимальной. Данный аппарат рассчитан на глубину до 30 метров.
Рисунок 1. Беспилотный подводный аппарат
В качестве базовой математической модели беспилотного подводного аппарата, как и для других типов морских подвижных объектов, принимается система обыкновенных нелинейных дифференциальных уравнений 12-го порядка, которая описывает движение объекта, как управляемого твердого тела, частично погруженного в жидкость. К основным динамическим особенностям любого объекта управления относятся устойчивость, управляемость, наблюдаемость, робастность и чувствительность.
г. Самара |
783 |

Научный аспект |
№9 2023 |
том 7 |
|
|
|
В общем случае система нелинейных дифференциальных уравнений, моделирующая динамику беспилотного аппарата в российских стандартах, имеет следующий вид:
Vx = Fx (V, ω,a, δr , δs , δn , F0 x ),
Vy = Fy (V, ω,a, δr , δs , δn , F0 y ), Vz = Fz (V, ω,a, δr , δs , δn , F0 z ),
ωx = Fωx (V, ω,a, δr , δs , δn , M0 x ),
ωy = Fωy (V, ω,a, δr , δs , δn , M0 y ), ωz = Fωz (V, ω,a, δr , δs , δn , M0 z ).
Линейные уравнения движения в горизонтальной плоскости имеют вид
Vz = a11Vz +a12ωy +b1δ+ F0 y ,
ωy = a21Vz +a22ωy +b2δ+ M0 z , φ = ωy ,
δ = u, y = φ.
Рассмотрим фиксированную скорость хода, для которой значения по-
стоянных коэффициентов математической модели будут |
иметь следую- |
||
щие значения: |
a11 = -0.24 , a12 = -0.591, |
b1 = −0.1071; |
a21 = 0.00102 , |
a22 = −0.6195 , b2 |
= 0.12578 . |
|
|
Закон управления для указанной системы имеет следующий вид: u = −0.0126Vz −0.3984ωy −0.2φ−0.3122δr .
Определим устойчивость замкнутой системы. Записав матрицу Ac за-
мкнутой системы, вычисляем ее собственные значения:
λ1 = −0.5658, λ2 = −0.2668, λ3 = −0.1695 +0.0989i, λ4 = −0.1695 −0.0989i,
т.е. замкнутая система устойчива по курсу.
Уравнения стабилизации по крену плоскости имеют вид
ωx = ax1ωx +ax2θ+bxδx +δx (t),
θ = ωx ,
δx = ux .
784 |
na-journal.ru |

Информационные технологии
Значения постоянных коэффициентов линейной системы:
a1 = −1.8 , a2 = −0.95 , b = 0.1125 .
Закон управления имеет следующий вид: u = −0.0031ωx −0.0255θ−0.0267δx .
Таким образом, записав матрицу Ac замкнутой системы, вычисляем
ее собственные значения:
λ1 = −0.9015 +0.3783i, λ2 = −0.9015 −0.3783i, λ3 = −0.0235,
т.е. замкнутая система устойчива по крену.
Линейные уравнения движения беспилотного подводного аппарата в вертикальной плоскости имеют вид
Vy = a11Vy +a12ωz +a13ψ+b11δs +b12δn + F0 y ,
ωz = a21Vy +a22ωz +a23ψ+b21δs +b22δn + M0 z ,
ψ = ωz ,
η = a41Vy +a43ψ,
δs = us , δn = un .
Приняты следующие значения постоянных коэффициентов:
a11 = −0.27 , |
a12 = 0.315 , a13 = −0.015 , b11 = |
0.315 , b12 = 0.027 , |
a21 = −0.45 , a22 |
= −0.9 , a23 = −0.11, b21 = −0.315 |
, b22 = 0.0202 . |
Позиционные регуляторы для кормовых и носовых рулей соответственно имеют следующий вид:
uk = −0.2176Vy +0.1152ωz +0.0914ψ−0.2998δk ,
un =1.7352Vy −5.5343ωz −6.418ψ−η+1.695δk −0.3611δn .
Таким образом, записав матрицу Ac замкнутой системы, вычисляем
ее собственные значения:
λ1 = −0.5524 +0.3466i, λ2 = −0.5524 −0.3466i, λ3 = −0.2759 +0.2822i, λ4 = −0.2759 −0.2822i, λ5 = −0.0615, λ6 = −0.1127,
т.е. замкнутая система устойчива в вертикальной плоскости.
Теперь рассмотрим управляемость. Матрица управляемости для системы, описывающей уравнения движения аппарата в горизонтальной плоскости, имеет вид:
г. Самара |
785 |

Научный аспект |
№9 2023 |
том 7 |
|
|
|
Qu = (B AB A2 B )
Ее ранг равен 3, т.е. система полностью управляема.
Матрица управляемости для системы, описывающей уравнения стабилизации аппарата по крену, имеет вид:
Qu = (B AB )
Ее ранг равен 2, т.е. система полностью управляема.
Матрица управляемости для системы, описывающей уравнения движения БПА в вертикальной плоскости, имеет вид:
Qu = (B AB A2 B A3 )
Ее ранг равен 4, т.е. система полностью управляема.
Аналогичным образом рассмотрим наблюдаемость замкнутой системы. Матрица наблюдаемости для системы, описывающей уравнения движе-
ния рассматриваемого аппарата в горизонтальной плоскости, имеет вид:
Qy = (CT AT CT AT 2CT )
Ее ранг равен 3, т.е. система полностью наблюдаема.
Матрица наблюдаемости для системы, описывающей уравнения стабилизации аппарата по крену, имеет вид:
Qy = (CT AT CT )
Ее ранг равен 2, т.е. система полностью наблюдаема.
Матрица наблюдаемости для системы, описывающей уравнения движения рассматриваемого аппарата в вертикальной плоскости, имеет вид:
Qy = (CT AT CT AT 2CT AT 3CT )
Ее ранг равен 4, т.е. система полностью наблюдаема.
Для рассмотрения свойства робастности нам потребуемся составить интервальный полином и исследовать его.
Рассмотрим замкнутую систему движения беспилотным аппаратом в горизонтальной плоскости. Найдем ее характеристический полином:
δ(s) = s4 +1.4905s3 +0.8730s2 +0.1967s +0.0184 .
Составим интервальный полином с коэффициентами, изменяющимися в пределах 10% от номинала, т.е. pi [αi , βi ], где
αi = 0.9 pi , βi =1.1pi .
786 |
na-journal.ru |

Информационные технологии
δ (s)= sn + p1sn−1 + + pn .
Запишем четыре вспомогательных полинома Харитонова: p1 (s)= s4 +1.3415s3 +0.9603s2 +0.2163s +0.0166,
p2 (s)= s4 +1.6396s3 +0.9603s2 +0.1770s +0.0166, p3 (s)= s4 +1.6396s3 +0.7857s2 +0.1770s +0.0202,
p4 (s)= s4 +1.3415s3 +0.7857s2 +0.2163s +0.0202.
Найдем их корни:
γ11 = −0.5179 +0.5905i, γ12 = −0.5179 −0.5905i, γ13 = −0.1528 +0.0591i,
γ14 = −0.1528 −0.0591i,
γ21 = −0.7066 +0.3378i, γ22 = −0.7066 −0.3378i, γ23 = −0.1132 +0.1191i,
γ24 = −0.1132 −0.1191i,
γ31 = −1.0206, γ32 = −0.1413 +0.1975i, γ33 = −0.1413 −0.1975i, γ34 = −0.3364,
γ41 = −0.4294, γ42 = −0.3663 +0.3583i, γ43 = −0.3663 −0.3583i, γ44 = −0.1795.
Все они лежат в открытой левой полуплоскости, следовательно, система робастно устойчива.
Теперь рассмотрим замкнутую систему стабилизации по крену. Найдем ее характеристический полином:
δ(s) = s3 +1.8267s2 +0.9984s +0.0282 .
Составим интервальный полином с коэффициентами, изменяющимися в пределах 10% от номинала, т.е. pi [αi , βi ], где
αi = 0.9 pi , βi =1.1pi .
δ (s)= sn + p1sn−1 + + pn .
Запишем четыре вспомогательных полинома Харитонова: p1 (s)= s3 +1.6440s2 +1.0982s +0.0311,
p2 (s)= s3 +2.0094s2 +1.0982s +0.0254, p3 (s)= s3 +2.0094s2 +0.8986s +0.0254,
p4 (s)= s3 +1.6440s2 +0.8986s +0.0311.
Найдем их корни:
γ11 = −0.8072 +0.6315i, γ12 = −0.8072 −0.6315i , γ13 = −0.0295,
γ21 = −0.9925 +0.2549i , γ22 = −0.9925 −0.2549i , γ23 = −0.0241,
г. Самара |
787 |

Научный аспект |
№9 2023 |
том 7 |
|
|
|
γ31 = −1.3645, γ32 = −0.6146, γ33 = −0.0303,
γ41 = −0.8035 +0.4398i, γ42 = −0.8035 −0.4398i, γ43 = −0.0370.
Все они лежат в открытой левой полуплоскости, следовательно, система робастно устойчива.
Рассмотрим замкнутую систему движения в вертикальной плоскости. Найдем ее характеристический полином:
δ(s) = s6 +1.8309s5 +1.4846s4 +0.6258s3 +0.1454s2 +0.0143s +0.0004 .
Составим интервальный полином с коэффициентами, изменяющимися в пределах 10% от номинала, т.е. pi [αi , βi ], где αi = 0.9 pi , βi =1.1pi .
δ (s)= sn + p1sn−1 + + pn .
Запишем четыре вспомогательных полинома Харитонова:
p1 (s)= s6 +1.6478s5 +1.6350s4 +0.6884s3 +0.1309s2 +0.0129s +0.0005, p2 (s)= s6 +2.0140s5 +1.6350s4 +0.5633s3 +0.1309s2 +0.0158s +0.0005, p3 (s)= s6 +2.0140s5 +1.3378s4 +0.5633s3 +0.1600s2 +0.0158s +0.0004, p4 (s)= s6 +1.6478s5 +1.3378s4 +0.6884s3 +0.1600s2 +0.0129s +0.0004.
Найдем их корни:
γ11 = −0.5130 +0.7745i, γ12 = −0.5130 −0.7745i, γ13 = −0.3317, γ14 = −0.0887, γ15 = −0.1007 +0.0987i, γ16 = −0.1007 −0.0987i,
γ21 = −0.1826, γ22 = −0.7992 +0.4601i, γ23 = −0.7992 −0.4601i,
γ24 = −0.0928 +0.2458i, γ25 = −0.0928 −0.2458i, γ26 = −0.0470,
γ31 = −1.21, γ32 = −0.4617, γ33 = −0.0986 +0.4054i,
γ34 = −0.0986 −0.4054i, γ35 = −0.1041, γ36 = −0.0407,
γ41 = −0.7464, γ42 = −0.2489 +0.6039i, γ43 = −0.2489 −0.6039i,
γ44 = −0.2903, γ45 = −0.0566 +0.0355i, γ46 = −0.0566 −0.0355i.
Все они лежат в открытой левой полуплоскости, следовательно, система робастно устойчива.
Для исследования чувствительности математической модели к изменению параметров было проведено моделирование линейной математической модели при фиксированном скоростном законе управления со случайно изменяющимися в пределах 30% от номинала коэффициентами
788 |
na-journal.ru |
Информационные технологии
линейной модели. Результаты моделирования движения в горизонтальной плоскости представлены на рис. 2.
12
10 


8 |
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
00 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
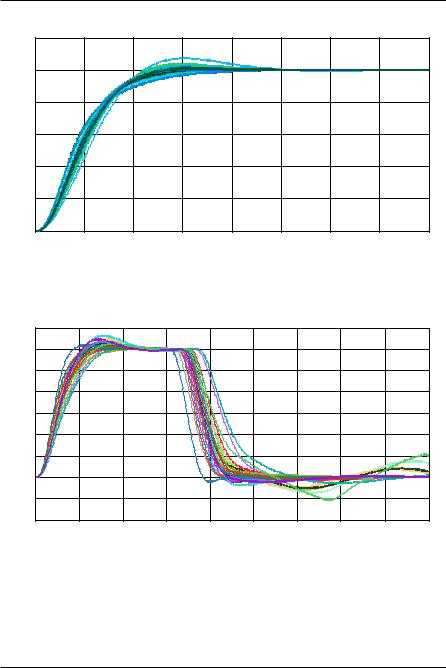
Рисунок 2. Изменение курса
На рис. 2 представлено изменение курса беспилотного аппарата в процессе выхода на заданный курсовой угол φz =10 для пятидесяти слу-
чайных вариаций исходной математической модели. Как видно из графика, при изменении коэффициентов в указанных пределах динамика системы практически не меняется. При изменении значений коэффициентов в пределах 40% от номинала в процессе тестового моделирования критического изменения динамики также не обнаружено.
Для исследования чувствительности математической модели движения беспилотного аппарата в вертикальной плоскости к изменению параметров было проведено моделирование линейной математической модели при фиксированном скоростном законе управления со случайно изменяющи-
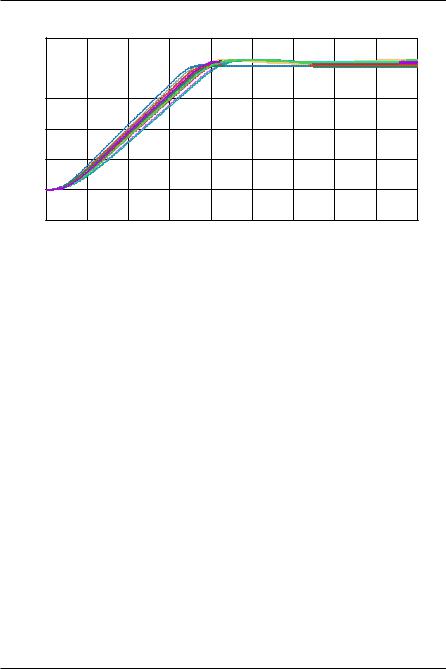
мися в пределах 30% от номинала коэффициентами линейной модели. Результаты моделирования движения представлены на рис. 4 и 5.
На данных графиках представлены изменение дифферента и глубины аппарата в процессе выхода на заданную глубину ηz = 20м для пятидеся-
ти случайных вариаций исходной математической модели. Как видно из
г. Самара |
789 |
Научный аспект |
|
|
№9 2023 |
|
|
|
том 7 |
||||
|
12 |
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
10 |
20 |
30 |
|
40 |
50 |
60 |
70 |
80 |
|
|
|
|
|
Рисунок 3. Изменение курса |
|
|
|
|||
|
14 |
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
ψ, grad |
6 |
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
-40 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
Рисунок 4. Изменение угла дифферента |
|
|
|||||
графика, при изменении значений коэффициентов в пределах 30% от номинала в процессе тестового моделирования критического изменения динамики не обнаружено.
790 |
na-journal.ru |
Информационные технологии
η, m
25
20 


15
10
5
0
-50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
||||||||||
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
Рисунок 5. Изменение глубины
Таким образом, в статье исследованы динамические особенности конкретного беспилотного подводного аппарата. В результате изучения выявлено, что система управления беспилотным подводным аппаратом с рассматриваемой математической моделью устойчива, полностью управляема, полностью наблюдаема. Кроме того, данная система робастно устойчива и не чувствительна к изменению параметров математической модели, что позволяет вносить различные изменения в конструкцию беспилотного подводного аппарата, не изменяя при этом математическую модель. Это означает, что можно навешивать дополнительное оборудование, а также, к примеру, изменять материал корпуса для увеличения максимальной глубины погружения, мощность двигателей для увеличения максимальной скорости хода, увеличивать количество батарей на борту для более длительной работы, и это практически не скажется на динамике подводного аппарата. Компьютерное моделирование проведено в системе MATLAB-Simulink.
Список литературы
1.VeremeiE.I.,Korchanov V.M.Multiobjectivestabilizationofacertainclassofdynamic systems // Automation and Remote Control, № 49, 1989. pp. 1210–1219.
г. Самара |
791 |

Научный аспект |
№9 2023 |
том 7 |
|
|
|
2.Веремей Е. И. Линейные системы с обратной связью. — СПб.: Изд–во «Лань», 2013–448 с.
3.Веремей Е. И., Корчанов В. М. Многоцелевая стабилизация динамических систем одного класса // АН СССР. Автоматика и телемеханика. 1988.— № 9. — С. 126–137.
4.Веремей Е. И. Синтез законов многоцелевого управления движением морских объектов // Гироскопия и навигация. 2009.— № 4. — С. 3–14.
5.Smirnov N.V., Smirnova M.A., Smirnov A.N., Smirnov M. N. Combined control synthesis algorithm. 2017 Constructive Nonsmooth Analysis and Related Topics (Dedicated to the Memory of V. F. Demyanov), CNSA 2017 — Proceedings.— 2017 — pp. 194–196.
6.Smirnova M.A., Smirnov M.N., Smirnova T.E., Smirnov N. V. Multi-purpose control laws in motion control systems // Information (Japan).— 2017.— 20(4). — pp. 2265–2272.2017.
7.Smirnov N.V., Smirnova M.A., Smirnova T.E., Smirnov M. N. The Problem of Synthesis the Control Laws with Uncertainties in External Disturbances. // Lecture Notes in Engineering and Computer Science,— 2017. — pp. 276–279.
8.Smirnov N.V., Smirnova M.A., Smirnova T.E., Smirnov M. N. The Issues of Multipurpose Control Laws Construction. // Lecture Notes in Engineering and Computer Science.— 2017. — pp. 194–196.
9.Smirnova M.A., Smirnov M. N. Multipurpose control laws in trajectory tracking problem.// International Journal of Applied Engineering Research.— 2017–11(22), — pp.11104–11109.
10.Vitrant E., Canudas–De–Vit C., Georges D., Alamir M. Remote stabilization via time–varying communication network delays // IEEE Conference in Control Applications, Taiwan,— 2004.
11.Smirnov M.N., Smirnova M. A. Control synthesis for marine vessels in case of limited disturbances // Telkomnika (Telecommunication Computing Electronics and Control),— 2018,— 16(2), — pp. 648–653.
12.Smirnov M.N., Smirnova M. A. Questions of stabilization and control of unmanned aerial vehicles // Comptes Rendus de L’Academie Bulgare des Sciences,— 2018,— 71(1), — pp. 87–91.
792 |
na-journal.ru |