

книги / Теория механизмов и машин курсовое проектирование
..pdfМинистерство науки и высшего образования Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего образования
«Пермский национальный исследовательский политехнический университет»
А.Е. Кобитянский, А.В. Шафранов
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН: КУРСОВОЕ ПРОЕКТИРОВАНИЕ
Утверждено Редакционно-издательским советом университета
в качестве учебного пособия
Издательство Пермского национального исследовательского
политехнического университета
2022
1
УДК 621.01 (075.8) К55
Рецензенты:
канд. техн. наук А.В. Пепелышев
(ООО «Пермские насосы»); д-р техн. наук, профессор В.Я. Беленький
(Пермский национальный исследовательский политехнический университет)
Кобитянский, А.Е.
К55 Теория механизмов и машин: курсовое проектирование : учеб. пособие/ А.Е. Кобитянский, А.В. Шафранов.– Пермь: Изд-во Перм. нац. исслед. политех. ун-та, 2022. – 121 с.
ISBN 978-5-398-02819-5
Представлены методические материалы для выполнения курсового проекта по дисциплине «Теория механизмов и машин».
В сочетании с теоретическим материалом даны подходы и методики проектирования механизмов и машин. Пособие включает следующие разделы курсового проектирования: кинематический анализ плоских рычажных механизмов, силовой расчет, проектирование зубчатого зацепления, проектирование плоских кулачковых механизмов и расчет маховика.
Предназначено для студентов технических специальностей вузов по направлениям «Машиностроение», Конструкторско« -технологическое обеспечениемашиностроительныхпроизводств»,«Технологическиемашины и оборудование»,«Горное дело», «Нефтегазовое дело» и др.
УДК 621.01 (078)
ISBN 978-5-398-02819-5 |
© ПНИПУ, 2022 |
2
ОГЛАВЛЕНИЕ |
|
Предисловие...................................................................................................... |
5 |
1. Кинематический анализ плоских рычажных механизмов................. |
6 |
1.1. Графический метод (метод кинематических диаграмм) ................ |
6 |
1.2. Графоаналитический метод (метод планов).................................. |
12 |
1.3. Пример выполнения задания........................................................... |
22 |
2. Кинетостатический (силовой) расчет механизмов ............................. |
31 |
2.1. Задачи силового расчета .................................................................. |
31 |
2.2. Реакции связей структурных групп II класса................................. |
32 |
2.3. Силовой расчет механизма І класса................................................ |
33 |
2.4. Алгоритм силового расчета............................................................. |
35 |
2.5. Пример силового расчета................................................................. |
36 |
2.6. Пример выполнения задания........................................................... |
45 |
3. Проектирование прямозубого зубчатого зацепления |
|
цилиндрических колес.................................................................................. |
51 |
3.1. Основные виды коррекции зубчатых колес................................... |
51 |
3.2. Теоретические основы и особенности проектирования |
|
эвольвентного зубчатого зацепления ............................................ |
55 |
3.3. Выбор расчетных коэффициентов смещения инструмента......... |
56 |
3.4. Построение картины зацепления .................................................... |
68 |
3.5. Построение картины инструментального зацепления.................. |
71 |
3.6. Пример выполнения задания........................................................... |
74 |
4. Проектирование кулачковых механизмов........................................... |
79 |
4.1. Определение основных размеров кулачкового механизма |
|
с поступательно движущимся роликовым толкателем................. |
79 |
4.2. Определение основных размеров кулачка |
|
с роликовым коромыслом................................................................ |
84 |
4.3. Определение минимальных размеров кулачка |
|
с поступательно движущимся плоским толкателем..................... |
87 |
4.4. Задания на курсовой проект............................................................. |
91 |
3
5. Расчет и проектирование маховика..................................................... |
100 |
5.1. Формирование исходных данных для проведения |
|
расчета маховика............................................................................ |
100 |
5.2. Коэффициент неравномерности хода........................................... |
102 |
5.3. Расчет и построение графиков моментов сил, |
|
работ и избыточных работ............................................................. |
104 |
5.4. Определение момента инерции маховика |
|
по методу Н.И. Мерцалова............................................................ |
109 |
5.5. Расчет момента инерции маховика |
|
по методу Ф. Виттенбауэра........................................................... |
112 |
5.6. Определение основных размеров маховика................................ |
115 |
5.7. Конструкции маховиков................................................................ |
116 |
Список рекомендуемой литературы........................................................ |
120 |
4
ПРЕДИСЛОВИЕ
Материалы по выполнению курсового проекта дисциплины «Теория механизмовимашин»являютсячастьюединогометодическогокомплекса, дополняющего конспект лекций в двух частях, лабораторный практикум, сборник задач и тестов, задания на курсовой проект и ряд монографий авторов данного пособия.
Цель пособия – привить умения и навыки применения теоретических основ теории механизмов и машин (ТММ) к процессу проектирования механизмов из различных областей техники.
В пособии изложены методики и подходы к выполнению курсового проекта в объеме пяти разделов дисциплины (пяти листов графической части проекта). Каждый раздел включает краткие теоретические предпосылки и примеры выполнения пояснительной записки и графической части.
Материалы пособия систематизированы и изложены в соответствии с читаемым курсом «Теория механизмов и машин». Базируются на сведениях, полученных студентами при изучении естественно-научных и общетехнических дисциплин – математики, физики, теоретической механики, инженерной графики и др.
Может быть использовано студентами при выполнении курсового проекта,контрольныхзаданийидляподготовкикэкзаменупокурсуТММ.
5
1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Основные методы анализа– графический, графоаналитический (метод планов), аналитический, экспериментальный и т.д. [1, 3, 6].
Кинематическое исследование механизмов заключается:в решении задач о положениях;
решении задач о скоростях и ускорениях произвольных точек и звеньев.
Приэтомзаданыкинематическаясхемаизаконыдвиженияначальных звеньев механизма.
1.1. Графический метод (метод кинематических диаграмм)
Определение предельных положений механизма
Предельные положения механизма определяют, когда рабочий орган механизма занимает крайние положения. Способы, пользуясь которыми можно в зависимости от типа механизма найти предельные положения, представлены на рис. 1.1–1.3 [5, 6].
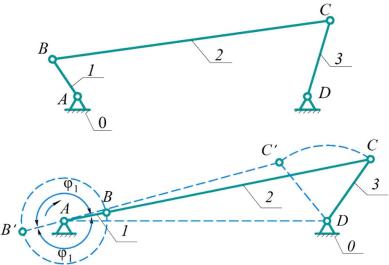
Дляшарнирного четырехзвенника(см.рис.1.1, a,б)предельныеполо-
жения коромысла 3 будут тогда, когда кривошип 1 и шатун 2 располагаются на одной прямой. Из точки А в масштабе чертежа радиусом кривошипа, а из точки D радиусом коромысла проводят окружности. Затем из А проводят засечки длинами AB + BC и BС – АВ до пересечения с траекторией коромысла в точках С и С . Полученные точки С и С соединяют с точкой А отрезками, пересекающими окружность кривошипа в точках В и B . Положения механизма,соответствующиесхемамABCD иAB C D,– предельные(см.рис.1.1).
а
б
Рис. 1.1. Шарнирный четырехзвенник: а – схема; б – крайние положения
6
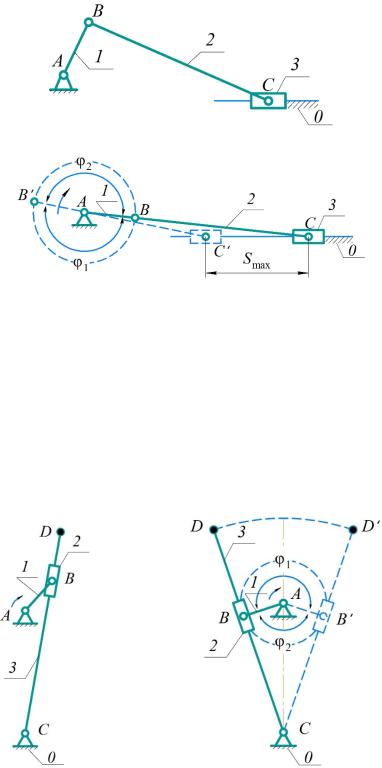
Методика определения крайних положений для кривошипно-ползун- ного механизма (см. рис. 1.2) аналогична той, которая рассмотрена выше.
а
б
Рис. 1.2. Кривошипно-ползунный механизм: а – схема; б – крайние положения
Для механизма с качающейся кулисой определение предельных положений начинают с построения окружности кривошипа 1 с центром в точке А. Затем проводятся две касательные к этой окружности из точки C – центра качания кулисы 3. При этом кривошип АB перпендикулярен касательным.ВрезультатесхемыАВC иАB C механизмасоответствуютдвум крайним положениям (см. рис. 1.3).
а |
б |
Рис. 1.3. Кулисный механизм: а – схема; б – крайние положения
Для более сложных стержневых механизмов крайние положения определяют, исходя из конкретной схемы с учетом способов, изложенных выше.
7
Построение положений механизмов
Построение положений механизма проводится в определенном масштабе. Масштабный коэффициент схемы μl (м/мм) характеризует отношение длины одного из звеньев (м) к длине отрезка схемы (мм), соответствующего этому звену. Например, μl = lAB /(АВ)(рис. 1.4). Рекомендуется масштабный коэффициент выбирать простым числом, чтобы с ним удобно было проводить вычисления. Выбрав масштабный коэффициент, определяют длины отрезков схемы (мм), соответствующие остальным звеньям. Например, BC = lBC / μl, СD = lCD / μl и т.д. После выбора масштабного коэффициентастроятсякрайниеположениямеханизма,одноизкоторыхпринимается за начальное, соответствующее началу рабочего хода. Таким образом,занулевоеположение(началоотсчета)принимаетсяположениекривошипа, соответствующее начальному.
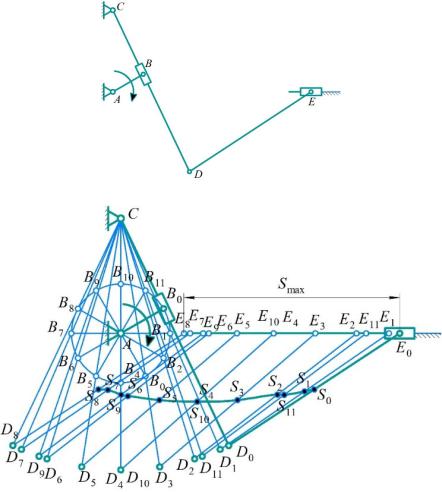
Построение всех текущих положений механизма ведется в порядке присоединения структурных групп методом засечек в соответствии с направлением движения начального звена. На рис. 1.4 изображена схема кулисного механизма в двенадцати положениях.
а
|
Рис. 1.4. |
|
а – структурная |
|
схема механизма; |
|
б – схема кулис- |
|
ного механизма |
б |
в 12 положениях |
при μl = 0,005 м/мм |
8
Соединив плавной кривой последовательные положения характерных точек, получают траектории их движения (точка S на рис. 1.4). Расстояние между двумя крайними положениями выходного звена называется максимальным перемещением, или максимальным ходом, Smax (см. рис. 1.4, б).
Построение кинематических диаграмм
Дляточкимеханизма,совершающейпрямолинейноевозвратно-посту- пательное движение, строится диаграмма перемещений (например, точки E на рис. 1.4). Диаграмма перемещений дает текущее положение точки E относительно ее начального положения E0. Для этого строят прямоугольную систему координат, где по горизонтали откладывают положение начального звена (ось 0φ), а по вертикали перемещение точки механизма (ось 0S) (рис. 1.5). Масштабный коэффициент угла поворота , рад/мм:
|
μφ= |
|
2π |
, |
|
|||
|
|
|
|
|
|
|||
|
|
–k |
||||||
где[0–k]– отрезокпоосиφ(мм), |
изображающийполныйобороткривошипа. |
|||||||
|
0 |
|
|
|
|
|||
Масштабный коэффициент времени t, с/мм: |
||||||||
|
|
60 |
|
|
|
|
2π |
|
μt= |
|
|
= |
|
|
, |
||
n 0–k |
|
ω |
0–k |
|||||
|
|
|
|
|
1 |
|
|
|
где n – число оборотов кривошипа в минуту, 1 – угловая скорость вращения кривошипа.
При равномерном вращении кривошипа перемещение SE φ = SE t . Выбранный отрезок длиной [0–k] мм делится на k равных частей и через точки деления в масштабе μS откладывают по вертикали соответствующее перемещение точки, которое измеряется по схеме механизма в виде отрезковE0E1,E0E2,E0E3 ит.д.Соединивполученныеточки,получаюткривую перемещений, пример которой представлен на рис. 1.5, a. Для получения графика пути заданной точки откладывают по вертикали отрезки E0E1, E0E2, ... E0E8 + E8E9, E0E8 + E8E10 и т.д., т.е. этот график – зеркальное отражение ветви графика перемещений на участке после второго крайнего положения (см. рис. 1.5, а). Обычно длина отрезка [0–k] (мм) выбирается кратнойчислу360. Например,приисследовании12 положений[0–k]может быть равным 120, 180, 240, 360мм и т.д. Следует учесть, что если отрезки E0Ei брались со схемы без изменений, то μS = μl. Если E0Ei уменьшают в m раз, то μS = m μl, и наоборот.Если второе крайнее положение кривошипа не попадает в точку деления, то для нахождения этого положения на оси 0φ
используется принцип пропорциональных частей.
Используя график перемещения, можно графическим дифференцированием решить задачи о скоростях и ускорениях точки.
9