

книги / Теория механизмов и машин. Ч. 1
.pdfв)
VB3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
B3B2 , VB3B2 BC , |
|
|
|
|
|
|
||||||||||||
VB3 |
VB2 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BC |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
V |
|
|
V V |
|
, V |
|
|
|
|
|
|
|
|||||||||||||||||
B3 |
|
|
|
C |
|
|
|
B3C B3C |
|
|
|
|
|
|
VB |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pb3 V ; VB V pb3 |
; VB B |
b2 b3 V ; 3 |
|
|
. |
||||||||||||||||||||||||
3 |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
3 |
2 |
|
|
l CB3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
а |
|
б |
|
Рис. 4.5. Планы пятизвенного стержневого механизма: а – скоростей; б – ускорений
Построения в соответствии с этапом в) представлены на рис. 4.5, а.
|
|
|
VD |
pd |
|
|
CD pd |
CD pb |
V pd . |
|||||||||||||||||||||
|
|
|
pb3 |
|||||||||||||||||||||||||||
|
|
|
VB |
|
|
|
|
|
CB3 |
|
|
|
|
CB3 |
3 |
|
D |
V |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
При нахождении положения точки d плана скоростей используется пра- |
||||||||||||||||||||||||||||||
вило обхода контура B3CD и b3cd (см. рис. 4.5, а). |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
Ex , VEX / / x x , |
|
|
|
|
|
|
||||||||||||||
VE |
VX |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||
г) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
V |
V |
V |
|
, V |
|
ED . |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
E |
|
|
D |
|
|
|
|
|
ED |
|
|
|
ED |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Построения этапа г) изображены на рис. 4.5, а. |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
V pe |
|
|
|
de ; |
|
|
VED |
VED . |
||||||||||||||
|
|
|
|
|
|
|
|
; V |
|
4 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
V |
|
ED |
V |
|
|
lED |
l4 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Полный план скоростей для механизма представлен рис. 4.5, а.
51
Построение плана ускорений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
а) aA aC aX 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
б) |
aB aB |
; |
|
aB |
|
,aB |
|
//AB , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
2 |
|
|
|
|
|
|
|
|
|
|
|
a |
B1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
a |
|
a |
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, b //AB . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
B |
B |
AB |
|
|
|
|
|
|
|
a |
|
b1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
lAB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aB |
|
aB aBk |
B |
|
|
a rB B |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
3 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ak |
|
|
|
|
|
2 V |
|
|
|
|
, b k |
aB3B2 |
,a r |
|
//BC , |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
B B |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
B B |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
B B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
в) |
|
|
|
|
aC |
|
a |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
aB |
|
|
B C |
|
a B C , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
VB23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
aB C |
|
3lB C |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
lB3C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
cn |
|
aB3C |
,a n |
|
|
//BC;a |
|
|
BC. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
B C |
|
|
|
|
|
|
|
|
|
|
B C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Построения этапа в) проведены на рис. 4.5, б. По результатам этих по- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
строений получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n b |
|
|
|
|
|
|
|
|
|
|
|
kb |
; |
|
|
|
|
a |
a |
||||||||||||||||||||
a |
B |
|
a |
b |
|
; |
a |
|
|
|
a |
; ar |
|
|
|
a |
3 |
|
|
|
B3C |
|
B3C |
. |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
B C |
|
|
|
|
|
|
|
1 3 |
|
|
|
|
|
B B |
|
|
|
|
|
3 |
|
|
|
|
|
lB C |
l B3C |
|||||||||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
г) |
aD |
|
|
d |
|
CD d |
CD b |
|
a |
|
|
d . |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
b3 |
D |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
aB |
|
|
|
|
|
|
|
|
|
CB3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CB3 |
|
|
|
|
3 |
|
|
|
|
V |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Положение т. d плана ускорений находится по правилу обхода контура |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
В3СD и b3cd (рис. 4.5, б). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
aE aX aExk |
a rEx , aExk |
2 x VEx 0;aExr //x x , |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
д) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
2 |
|
|
|
|
|
an |
|
;a |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
a |
E |
|
a |
D |
a |
ED |
a |
ED |
, |
|
|
a |
ED |
l |
ED |
|
|
|
|
ED |
|
ED |
|
. |
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
a |
|
ED |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На рис. 4.5, б проведены построения этапа д).
a |
E |
|
a |
e ; a |
|
a |
n e ; ar |
a |
E |
; |
4 |
|
aED |
. |
|
|
|||||||||||||||
|
|
ED |
|
2 |
Ex |
|
|
|
lED |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Планускорениямеханизмавзаданномположенииизображеннарис. 4.5, б.
52
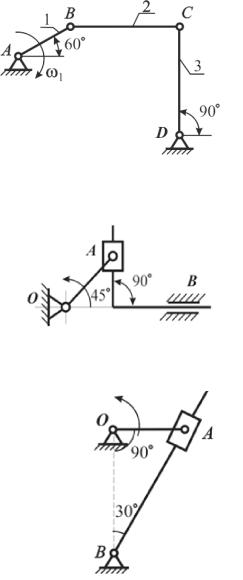
Контрольные вопросы и упражнения
1.Суть графоаналитического метода кинематического анализа механизмов.
2.Понятие о планах скоростей и ускорений.
3.Порядоксоставлениявекторныхуравненийприкинематическоманализе.
4.Суть метода подобия.
5.Определение угловой скорости и углового ускорения по величине
инаправлению для звеньев механизма.
6.Определение ускорения Кориолиса.
7.Нормальное ускорение: его величина и направление.
8.Особенности и уравнения при построении планов скоростей и ускорений для четырехзвенных плоских механизмов.
9.1 = 100 рад/с, lAB = 0,1 м, lBC = 0,4 м, lCD = 0,35 м. Найти 2 для данно-
го положения.
10.lOA = 0,3 м; OA = 12 с–1. Определить скорость поступательного движения кулисы в данном положении механизма.
11.Определить величину нормального ускорения точки A относительно точки В в данном положении механизма.
lOA = 15 см lAB = 0,3 м ωOA = 20 с–1
53
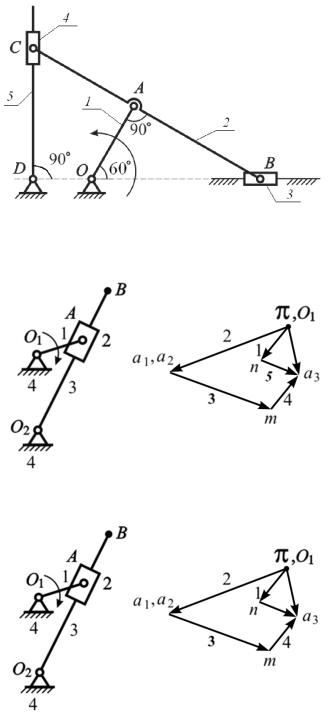
12. Чему равно ускорение Кориолиса аCk5C4 в данном положении механизма?
lOA = 30 см ωAO = 20 с–1
lAB = lAС lCD = 1 м
13. Указать вектор плана, соответствующий тангенциальному ускорению точки А относительно О2.
14. Указать вектор ускорения Кориолиса.
54

Лекция 5 АНАЛИТИЧЕСКИЙ МЕТОД КИНЕМАТИКИ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Содержание: метод векторных контуров; примеры кинематического исследования плоских рычажных механизмов.
Ключевые слова: векторный контур; уравнение замкнутости; задачи о положениях, скоростях и ускорениях.
5.1. Основные положения метода векторных контуров
Аналитические методы в отличие от графических и графоаналитических позволяют проводить кинематические исследования эффективно, с высокой степенью точности, с использованием численных методов и компьютерных технологий.
Один из методов аналитической кинематики рычажных механизмов метод векторных контуров, предложенный В.А. Зиновьевым.
Звенья механизма представляются в виде векторов, образующих замкнутый контур, уравнения которого проецируются на оси системы координат. На основе полученных математических соотношений решаются задачи о положениях, скоростях и ускорениях.
Для удобства дальнейшего изложения приняты следующие допущения
иобозначения:
1)k и k угловая скорость и угловое ускорение k-го звена;
2)VSk и aSk скорость и ускорение точки S k-го звена;
3)k , k , VS и aS соответственно аналоги угловой скорости и углового ускорения k-го звена, аналоги скорости и ускорения точки S;
4) |
k |
|
l |
k |
; |
|
lAS |
2 |
отношение длин звеньев к длине 1-го звена. |
|
|
|
|||||||
|
|
l1 |
|
AS2 |
l1 |
|
|
||
|
|
|
|
|
|
|
|||
Исходные данные для проведения расчетов: длины звеньев, угловая или линейная скорость начального (начальных) звена, схема механизма.
Применение аналитического метода удобно рассмотреть на примерах плоских рычажных механизмов.
5.2. Кинематический анализ кривошипно-ползунного механизма
Случай сборки механизма, когда при обходе по часовой стрелке сохраняется контур с последовательностью OABCO, представлен на рис. 5.1.
55
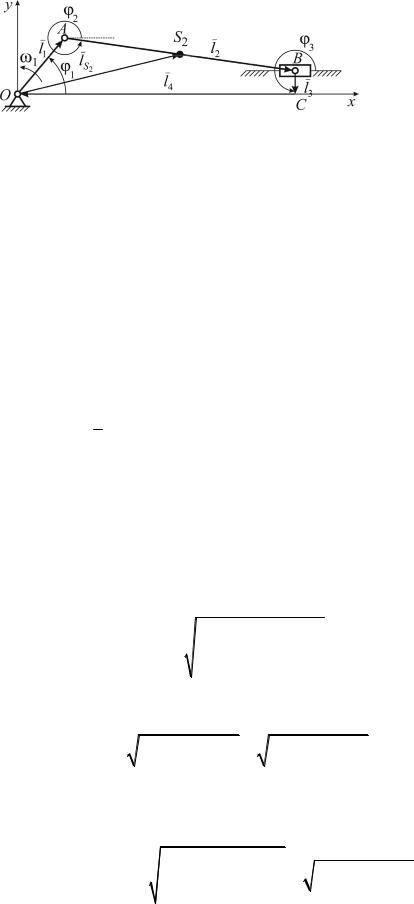
Рис. 5.1. Схема кривошипно-ползунного механизма
Даны длины звеньев, угловая скорость 1 и угловое ускорение 1 кривошипа OA.
Задача о положениях
Уравнение замкнутости векторного контура
|
|
|
|
|
|
|
|
|
|
|
0 . |
|
(5.1) |
||
|
|
l1 |
l2 |
l3 |
l4 |
|
|||||||||
В проекциях на оси xOy системы координат (рис. 5.1) |
|
||||||||||||||
l |
cos l |
cos |
|
l |
, |
(5.2) |
|||||||||
1 |
1 |
2 |
|
|
|
2 |
4 |
|
|||||||
l1 sin 1 |
l2 sin 2 |
|
e, |
|
|
||||||||||
так как 3 = 270 , 4 = 180 , l3 e дезаксиал.
Решая второе уравнение из (5.2), получают значение угла 2, характеризующего положение шатуна:
|
|
|
|
|
|
|
|
|
|
e sin 1 |
|
(5.3) |
||||
2 arcsin e l1 sin 1 |
|
arcsin |
. |
|||||||||||||
|
|
|
l2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
Текущее положение ползуна (точка C) |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
e sin 1 |
|
2 |
|
|
|
||
x |
l |
l |
cos |
|
2 |
1 |
|
|
. |
|
|
|||||
C |
4 |
1 |
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Максимальный ход ползуна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
H l4 max l4 min |
l1 |
2 1 2 |
e2 |
|
2 1 2 e2 |
. |
||||||||||
Текущее перемещение ползуна относительно одного из крайних положений, например левого
|
|
|
|
|
|
|
|
|
|
e sin 1 |
2 |
|
|
1 2 2 |
|
S |
|
x |
l |
|
l |
cos |
|
1 |
|
|
. |
||||
|
C |
C |
|
4 min |
1 |
|
1 |
2 |
|
22 |
|
|
2 |
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
56

Задача о скоростях
Дифференцируяпо времени (5.3), определяют угловую скорость шатуна:
|
|
|
|
d |
sin |
|
cos |
|
|
|
cos 1 |
|
|
|
2 |
, |
||||||
|
|
|
|
|
2 |
2 |
2 |
2 |
||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
2 |
1 |
|
|
|
1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
|
|
cos 1 |
аналог угловой скорости шатуна. |
|
|
|
|||||||||||||||
|
|
|
|
|||||||||||||||||||
2 |
|
2 cos 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Скорость ползуна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
V |
|
dSC |
l |
sin sin |
V |
|
, |
|||||||||||
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
C |
|
dt |
1 |
|
|
1 |
|
1 2 2 |
2 |
|
|
C |
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где VC l1 sin 1 2 2 sin 2 .
Задача об ускорениях
2 |
d |
2 1 |
2 |
2 |
sin 1 cos 2 sin 2 cos 1 2 . |
dt |
2 cos2 |
||||
|
2 |
|
1 |
|
|
aC dVdtC l1 12 cos 1 2 sin 2 22 1 sin 1 2 2 sin 2 .
Замечание. Для определения кинематических характеристик т. S2 зве-
на AB (см. рис. 5.1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.4) |
|||||
|
|
|
|
|
|
l1 |
lAS2 lS2 . |
|
|
|
|
|
|
|
|||||||||||
В проекциях на оси координат |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
xS2 |
l1 cos 1 |
lAS2 |
cos 2 , |
|
|
|
(5.5) |
||||||||||||||||
|
|
|
yS2 |
l1 sin 1 |
lAS2 |
sin 2. |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
Проекции скорости точки S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
x |
S2 |
l |
|
sin |
|
|
|
|
|
sin |
|
, |
|||||||||||||
|
|
1 1 |
|
1 |
|
|
AS2 |
2 |
|
|
|
2 |
|
||||||||||||
y |
S2 |
l |
cos |
|
AS2 |
|
|
cos |
|
. |
|
||||||||||||||
|
|
1 1 |
|
|
|
|
1 |
|
|
|
2 |
|
|
|
2 |
|
|||||||||
Значение скорости точки S2 и направляющий угол VS2 вектора этой |
|||||||||||||||||||||||||
скорости относительно оси 0x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
V |
|
x2 |
y |
2 , |
|
|
|
|
arccos |
xS2 |
. |
||||||||||||||
|
|
|
|
||||||||||||||||||||||
|
S2 |
|
|
S2 |
|
|
|
S2 |
VS2 |
|
|
|
|
VS2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
57
Аналогичным образом находится ускорение точки S2:
xS2 l1 12 cos 1 AS2 22 cos 2 1 sin 1 2 AS2 sin 2 , yS2 l1 12 sin 1 AS2 22 sin 2 1 cos 1 2 AS2 cos 2 ,
aS2 xS22 yS22 , aS2 axS2 .
S2
В некоторых механизмах длина шатуна существенно больше длины кривошипа, т.е. 2<<1. В этом случае для определения кинематических характеристик используют приближенные, более простые формулы на основе разложения радикалов в ряд по формуле бинома Ньютона. Подробнее с этими решениями можно ознакомиться в различных учебниках по ТММ.
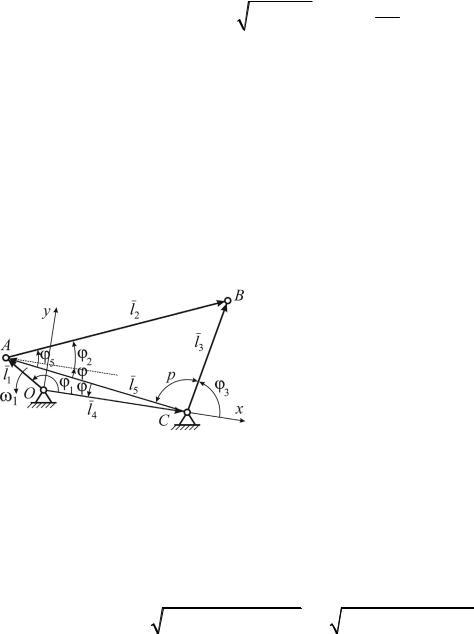
5.3. Кинематический анализ шарнирного четырехзвенника
Система координат выбрана так, что ось Ox направлена от точки O к точке C (рис. 5.2).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Даны длины звеньев, угловая скорость |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 и угловое ускорение 1 кривошипа OA. |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнение |
|
|
замкнутого |
векторного |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
контура OABC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
(5.6) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l1 |
l2 |
l3 |
l4 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В проекциях на оси координат |
|
|||||||||||||||||||||||||||
Рис. 5.2. Схема шарнирного |
|
|
|
|
l |
cos l |
cos |
|
|
l |
cos l |
, |
|
|||||||||||||||||||||||||||||||
четырехзвенника |
|
|
|
|
|
|
|
|
|
|
|
(5.7) |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
2 |
|
|
|
|
|
|
|
2 |
3 |
|
|
|
3 4 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l1 sin 1 |
l2 sin 2 |
l3 sin 3 , |
|
|
|||||||||||||||||||||||||
Задача о положениях |
|
так как 4 = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Из OAC длина вспомогательного вектора |
|
|
|
(см. рис. 5.2) |
|
|
|
|||||||||||||||||||||||||||||||||||||
l5 |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
l |
l2 |
l2 |
2l l |
cos |
|
l |
|
1 2 |
2 |
4 |
|
cos . |
|
|
|
|||||||||||||||||||||||||||||
5 |
1 |
|
4 |
1 4 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||||
Значения дополнительных углов в соответствии с рис. 5.2 |
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
y |
A |
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
arcsin |
|
|
|
|
|
|
arcsin |
|
|
|
|
|
1 |
|
|
|
, |
|
arccos |
|
|
2 |
5 |
3 |
, |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
l5 |
|
|
|
|
5 |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
2 2 5 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
p arccos |
2 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
5 |
|
2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 3 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
58
Величины углов поворота звеньев AB и BC:
2 |
|
при y |
A |
0, |
5 |
|
|
||
|
5 |
при yA 0, |
||
3 |
p при yA 0, |
|||
|
|
|
|
|
|
p при yA 0. |
|||
Задача о скоростях
Дифференцируя соотношения (5.7), получают систему уравнений относительно угловых скоростей звеньев 2 и 3:
sin 1 1 2 2 sin 2 |
3 3 sin 3 |
, |
(5.8) |
|||||||
|
|
|
|
|
3 3 cos |
3. |
||||
cos 1 1 2 2 cos 2 |
|
|||||||||
В результате решения (5.8) |
|
|
|
|
|
|
|
|
|
|
2 2 1, |
2 |
|
|
sin 1 3 |
|
|
|
, |
|
|
|
2 sin 2 3 |
|
|
|||||||
|
|
|
|
|
|
|
||||
3 3 1, |
3 |
|
|
sin 1 2 |
|
|
. |
|
||
3 sin 2 3 |
|
|
||||||||
|
|
|
|
|
|
|||||
Линейные скорости точек A и B
VA l1 1 , VB l3 3 ,
а их проекции
xA l1 1 sin 1 ; yA l1 1 cos 1 .
xB xA l1 2 2 sin 2 ; yB yA l1 2 2 cos 2 .
Задача об ускорениях
Соотношения для определения угловых ускорений 2-го и 3-го звеньев получают дифференцированием (5.8):
|
|
2 |
sin 1 1 |
|
|
|
2 |
|
|
|
2 2 sin 2 |
|
|
|
|
|
2 |
|
3 3 sin 3 , |
|
|||||||||||||||
cos 1 1 |
2 2 cos 2 |
3 3 cos 3 |
|
||||||||||||||||||||||||||||||||
|
|
|
cos 2 sin |
|
|
|
|
|
cos |
|
|
2 sin |
|
|
cos . |
|
|||||||||||||||||||
sin 2 |
2 |
2 |
2 |
3 |
|
||||||||||||||||||||||||||||||
|
1 |
1 |
|
1 |
1 |
|
2 |
2 |
|
2 |
|
|
|
|
|
|
3 |
|
3 |
3 |
|
|
3 |
|
|
3 |
|
||||||||
В результате |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
2 2 1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
2 sin2 2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
cos |
3 |
sin |
2 |
|
3 |
|
3 |
cos |
2 |
|
3 |
sin |
|
3 |
|
3 |
|
; |
|||||||||||||||||
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|||||||||
59
|
|
|
|
|
|
|
|
|
|
3 3 1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
3 sin2 2 |
3 |
|
|
|
|
|
|
|
|
||||||||
cos |
2 |
sin |
|
2 |
|
3 |
|
2 |
cos |
2 |
|
3 |
sin |
|
2 |
|
3 |
. |
|||||||||
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
2 |
|
|
||||||||
Линейные ускорения точек и их проекции |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
a |
A |
l |
4 |
2 ; |
x |
l 2 cos l sin |
; |
y |
l 2 sin l cos |
; |
|||||||||||||||||
|
1 |
1 |
|
|
1 |
A |
|
|
1 1 |
1 |
|
1 1 |
1 |
|
A |
|
1 1 |
1 |
1 1 |
|
1 |
|
|||||
|
|
|
|
aB l3 |
34 |
32 ; xB xA l1 2 22 cos 2 1 sin 2 ; |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
yB yA l1 2 22 sin 2 |
2 cos 2 . |
|
|
|
|
|
|
|
||||||||||||
Значения кинематических характеристик различных точек звеньев определяются аналогично методике, представленной в п. 5.2.
5.4. Кинематический анализ кулисного механизма
Схема механизма с качающейся кулисой представлена на рис. 5.3.
Рис. 5.3. Схема кулисного механизма
Даны длина кривошипа AB, кулисы OC, расстояние OA, угловая скорость 1 и угловое ускорение 1 кривошипа AB.
Уравнение замкнутости векторного контура OABО |
|
l1 l3 l4 0 . |
(5.9) |
Вектор l3 , характеризующий положение камня кулисы, имеет переменную величину и направление.
Задача о положениях
В проекциях (5.9) на оси координат (см. рис. 5.3)
l |
cos |
l |
cos , |
(5.10) |
1 |
1 |
3 |
3 |
|
l1 sin 1 |
l4 |
l3 sin 3. |
|
|
60