

Приложение 3
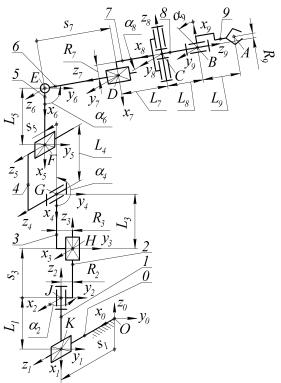
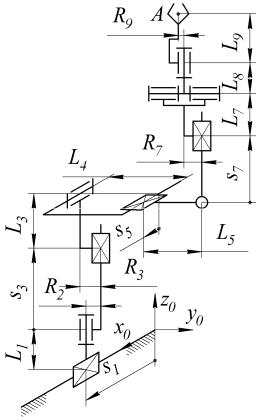
Решение прямой задачи о положениях для кинематической структуры манипулятора ПР
► Матрицы преобразований (см. приложение 1)
▼ Исходные данные
Постоянные параметры структуры (размеры звеньев)
L1 := 200 |
R2 := 150 |
L3 := 300 |
|||
R3 |
:=100 |
L4 |
:= 350 |
L5 |
:= 100 |
L6 |
:= 100 |
L7 |
:= 200 |
R7 |
:= 100 |
L8 |
:= 150 |
L9 |
:= 100 |
R9 := 20 |
|
Переменные параметры структу- ры (обобщенные координаты)
s1 := 100 |
α2 := 90o |
s3 :=100 |
α4 := 90o |
s5 := 20 |
α6 := 270o |
s7 := 50 |
α8 := 180o |
α9 := 0o |
▲ Исходные данные Координаты точки схвата в собственной системе координат:
æ R9 |
×cos(α9 )ö |
|
æ |
20 ö |
|||
ç |
R9 |
|
÷ |
|
ç |
|
÷ |
A := ç |
×sin (α9 ) ÷ |
A9 = |
ç |
0 |
÷ |
||
9 ç |
|
L |
÷ |
ç100÷ |
|||
ç |
|
9 |
÷ |
|
ç |
|
÷ |
ç |
|
1 |
÷ |
|
1 |
||
è |
|
ø |
|
è |
ø |
||
62
▼ Преобразования систем координат |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Переход от системы координат звена 9 к звену 8 |
-π ö |
|
|
||||||||||||||||
M9 _ 8 := Ms (L8 ×cos(α8 ), L8 ×sin(α8 ),0)× Mϕz (α8 -π ) |
|
|
æ |
|
|
||||||||||||||
×Mϕy ç |
2 |
÷ |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
ø |
|
|
|
|
|
|
|
æ0 |
0 |
-1 |
150ö |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
ç |
0 |
1 |
0 |
0 |
÷ |
|
|
|
|
|
|
|
|
|
|
M |
|
= |
ç |
÷ |
|
|
|
|
|
|
|
|
|
||||||
|
9 _ 8 |
|
|
ç |
1 |
0 |
0 |
0 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
1 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
ø |
|
|
|
|
|
|
|
|
|
|||||
Переход от системы координат звена 8 к звену 7 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
æ |
0 |
0 |
-1 |
-100ö |
|
|
|
||||
|
|
æ |
- |
|
|
|
ç |
0 |
1 |
0 |
|
|
0 |
÷ |
|
|
|
||
|
|
|
π ö |
|
M8 _ 7 = ç |
|
|
|
|
|
|
|
÷ |
|
|
|
|||
M8 _ 7 := Ms(-R7 ,0, -L7 )×Mϕy ç |
2 |
÷ |
|
1 |
0 |
0 |
|
|
|
|
|
|
|||||||
|
|
è |
ø |
|
|
ç |
|
-200÷ |
|
|
|
||||||||
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
|
|
1 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
ø |
|
|
|
|||||
Переход от системы координат звена 7 к звену 6 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
æ |
|
π |
ö |
× Mϕx |
æ π |
ö |
|
|
|
M7 _ 6 := Ms (s7 ×cos(α6 ), s7 ×sin (α6 ),0)×Mϕz çα6 - |
2 |
÷ |
ç |
÷ |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
è |
|
ø |
|
|
è 2 |
ø |
|
|
|
|
|
|
|
æ -1 |
0 |
0 |
0 |
ö |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
ç |
0 |
0 |
1 |
-50 |
÷ |
|
|
|
|
|
|
|
|
|
|
M |
|
= |
ç |
÷ |
|
|
|
|
|
|
|
|
|
||||||
|
7 _ 6 |
|
|
ç |
0 |
1 |
0 |
0 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
1 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
ø |
|
|
|
|
|
|
|
|
|
|||||
Переход от системы координат звена 6 к звену 5 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
æ1 |
0 |
0 |
|
-100 |
ö |
|
|
|
|||
|
|
|
|
|
|
|
|
ç |
0 |
1 |
0 |
|
|
0 |
÷ |
|
|
|
|
M6 _ 5 := Ms(-L5 ,0,0) |
|
|
|
|
|
M6 _ 5 = ç |
|
|
÷ |
|
|
|
|||||||
|
|
|
|
|
|
|
|
ç |
0 |
0 |
1 |
|
|
0 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
|
|
1 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
ø |
|
|
|
|||||
Переход от системы координат звена 5 к звену 4 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ 0 |
1 |
0 |
0 |
ö |
|
M5 _ 4 := Ms (L4 ×cos(α4 ), L4 .sin (α4 ), s5 )×Mϕz (α4 -π ) |
|
|
|
ç |
-1 |
0 |
0 |
350 |
÷ |
||||||||||
M5 _ 4 |
= ç |
÷ |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
1 |
20 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
1 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
ø |
||||
63
Переход от системы координат звена 4 к звену 3 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
æ 0 |
0 |
1 |
|
0 |
|
ö |
|
|
|
||
|
|
|
|
|
æ π |
ö |
|
M4 _ 3 |
= |
ç |
0 |
1 |
0 |
|
-100 |
÷ |
|
|
|
|||
M4 _ 3 := Ms(0, -R3 , L3 )×Mϕy ç ÷ |
|
ç |
-1 |
0 |
0 |
|
300 |
÷ |
|
|
|
|||||||||||
|
|
|
|
|
è 2 |
ø |
|
|
|
|
ç |
|
÷ |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
|
1 |
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
ø |
|
|
|
|||||
Переход от системы координат звена 3 к звену 2 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ1 |
0 |
0 |
0 |
ö |
|
|
|
|
|
|
|
|
|
æ |
α2 |
- |
π ö |
M3 _ 2 |
ç |
0 |
1 |
0 |
150 |
÷ |
||||
M3 _ 2 := Ms (R2 ×cos(α2 ), R2 ×sin (α2 ), s3 )× Mϕz ç |
|
÷ |
= ç |
0 |
0 |
1 |
100 |
÷ |
||||||||||||||
|
|
|
|
|
|
|
|
è |
|
|
2 ø |
|
|
|
ç |
÷ |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
1 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
ø |
||||
Переход от системы координат звена 2 к звену 1 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
æ0 |
0 |
-1 -200ö |
|
|
|
||||||
|
|
|
|
æ |
- |
|
|
|
|
|
ç |
0 |
1 |
0 |
|
0 |
÷ |
|
|
|
||
|
|
|
|
π ö |
|
M2 _1 |
= |
ç |
|
|
|
|
|
|
÷ |
|
|
|
||||
M2 _1 := Ms(-L1 ,0,0)× Mϕy ç |
2 |
÷ |
|
1 |
0 |
0 |
|
0 |
|
|
|
|||||||||||
|
|
|
|
è |
ø |
|
|
|
|
ç |
|
÷ |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
|
1 |
÷ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
è |
|
ø |
|
|
|
||||||
Переход от системы координат звена 1 к звену 0 (стойке) |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
æ 0 |
0 |
1 |
100ö |
|
|
|
|
||||
M1_ 0 := Ms (s1 |
|
|
|
æ |
π ö |
|
|
M1_ 0 |
|
ç |
0 |
1 |
0 |
0 |
÷ |
|
|
|
|
|||
,0,0)× Mϕy ç |
÷ |
|
|
= ç |
|
0 |
0 |
0 |
÷ |
|
|
|
|
|||||||||
|
|
|
|
è |
2 ø |
|
|
|
|
|
ç-1 |
÷ |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
ç |
0 |
0 |
0 |
1 |
÷ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
è |
ø |
|
|
|
|
||||||
|
Переход от системы координат звена 4 |
|
|
|
|
|
|
|
||||||||||||||
|
|
к неподвижной системе координат |
|
|
|
|
|
|
|
|
||||||||||||
M9 _ 0 := M1_ 0 ×M2 _1 ×M3 _ 2 ×M4 _ 3 ×M5 _ 4 × M6 _ 5 × M7 _ 6 × M8 _ 7 × M9 _ 8 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
æ 0 |
1 |
0 |
120 ö |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
M |
|
ç |
-1 |
0 |
0 |
400 |
÷ |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
= ç |
÷ |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
9 _ 0 |
ç |
0 |
0 |
1 |
1000÷ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ç |
0 |
0 |
0 |
|
1 |
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
ø |
|
|
|
|
|
|
|
|
|
|
||||
▲ Преобразования систем координат |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Координаты точки схвата в неподвижной системе координат |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
120 ö |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
380 |
÷ |
|
|
|
|
|
|
|
A := M |
|
× A |
|
|
|
|
|
|
|
A = ç |
÷ |
|
|
|
|
|
|
|||||
0 |
|
9 _ 0 |
9 |
|
|
|
|
|
|
|
|
0 |
ç1100 |
÷ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
1 |
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проверка
æ x0 A0 = çç y0 çè z0
ö |
æ |
|
s1 |
+ s5 |
|
|
÷ |
= ç |
R - R + L + L - R - R |
||||
÷ |
ç |
2 |
3 4 |
5 |
7 |
9 |
÷ ç L + s + L + s + L + L + L |
||||||
ø |
è |
1 3 |
3 |
7 7 |
8 |
9 |
65
ö |
æ 120 |
ö |
|
÷ |
ç |
380 |
÷ |
÷ |
= ç |
÷ |
|
÷ |
ç |
|
÷ |
ø |
è1100 |
ø |
|