

7.5 Режимы автоподстройки частоты
7.5.1 Стационарный режим
Допустим, что в неавтономной следящей АПЧ в начальный момент t = 0 имеются возмущения fГ.С(0) = fН; fС(0) = fС и fД(0) = fД; (для ЧАПЧ) или fОП(0) = fОП (для ФАПЧ). Предположим, что система АПЧ включается в момент t = 0 и во всей области t > 0 возмущения остаются без изменений. Если равновесие системы устойчиво, то можно утверждать, что при t наступит состояние покоя, при котором уровни всех сигналов в контуре регулирования постоянны и поэтому КФ(t) 1.
Рассмотрим ЧАПЧ и примем вначале, что fС = 0 и fД= 0. Как следует из (7.6), в стационарном режиме f(t) = f = fГ. С учетом сделанных замечаний дифференциальное уравнение (7.8) преобразуется к алгебраическому:
f f f Н SУ.Э. (7.10)
Корень уравнения (7.10) «расстройку» обозначим через fСТ. Для определения fСТ используем графический метод. В состоянии покоя ЕЧД = ЕФНЧ = ЕУ , и поэтому статические характеристики УЭ и ЧД могут быть построены в одной системе координат f – ЕУ что и сделано на рис. 7.13, а).
|
Рис.7.13,
а)
– Статические характеристики УЭ
|
Штриховая прямая 1' – это характеристика УЭ с тем же знаком SУ.Э = tg , что и на рис. 7.12. Ее уравнение совпадает с правой частью (7.10) при fH = fH1. Это означает, что искомое значение fСТ определяется точкой пересечения 1' статических характеристик ЧД и УЭ. |
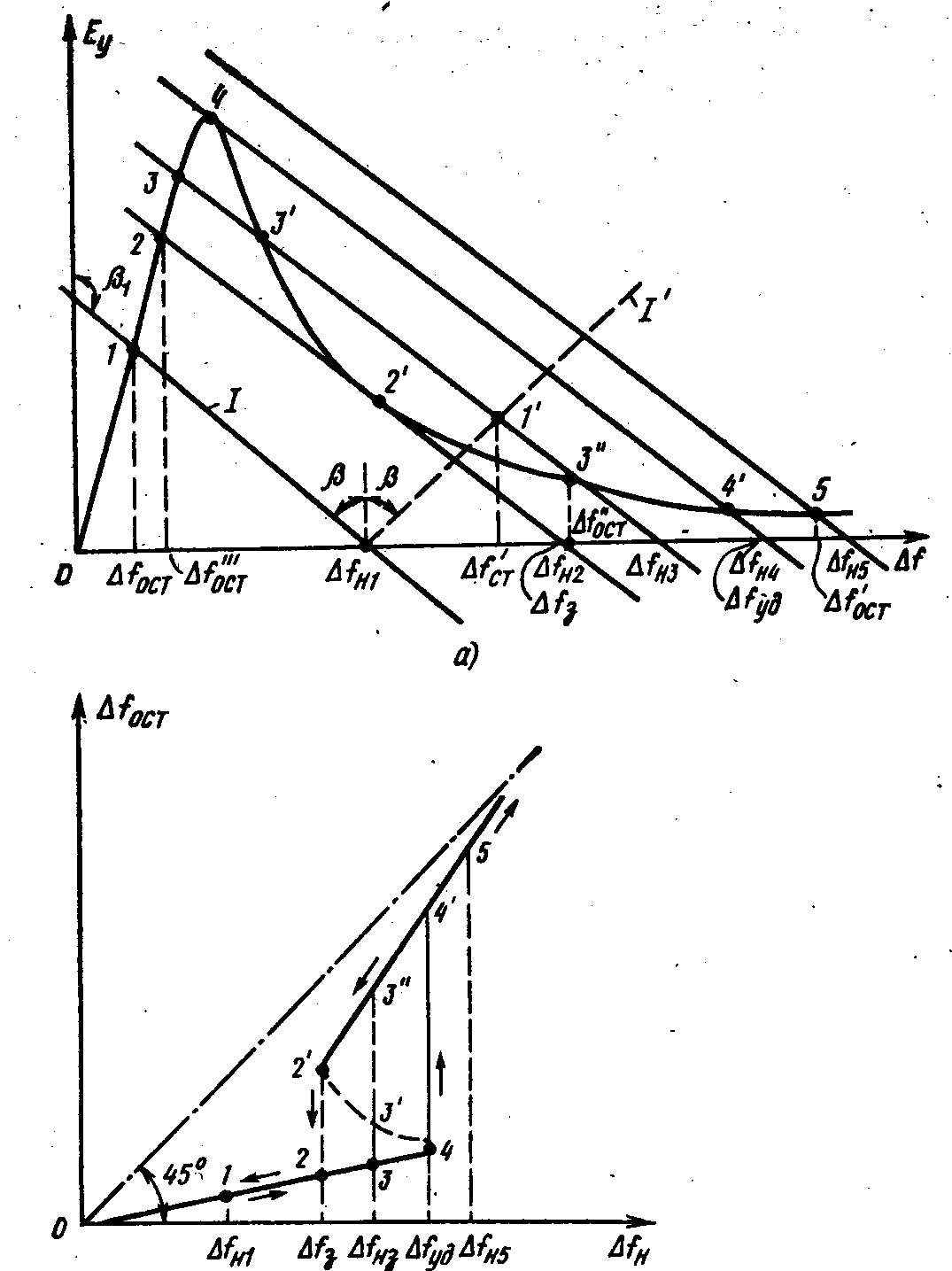
Из рис. 7.13, а) следует, что при совпадении знаков SЧД и SУ.Э, т.е. при SЧДSУ.Э > 0, система переходит к работе в неэффективном стационарном режиме, так как
fСТ = f'СТ > fH.
При разных знаках SЧД и SУ.Э (прямая 1, образующая с осью ординат угол 1 = 180° ), т. е. при SЧДSУ.Э<0, абсцисса точки 1, называемая остаточной «расстройкой» (статической ошибкой) fСТ = fОСТ, меньше начальной «расстройки» fH. Непосредственно из рисунка следует, что
fОСТ = fН/(1 + SЧДSУЭ). (7.11)
Сумма в знаменателе (7.11) представляет собой коэффициент автоподстройки Ка, с помощью которого оценивается эффективность работы ЧАПЧ. В дальнейшем, если не делается специальных оговорок, считается, что SЧДSУ.Э < 0 и речь идет об абсолютных значениях крутизны. Тогда, если SЧДSУ.Э » 1, то fОСТ « fН. Нетрудно заметить, что по физическому смыслу Ка совпадает с глубиной отрицательной обратной связи (ООС) в усилителях.
По графикам на рис.7.13, а) можно найти полосы удержания и захвата. Допустим, что координаты системы соответствуют точке 1. Если увеличивать начальную «расстройку» настолько медленно, чтобы с переходными процессами можно не считаться, то при значениях fН, равных fН2, fН3, fН4, эффективность стационарного режима будет сохраняться, так как точки 2, 3, 4 лежат на начальном участке СХ ЧД. Полоса удержания fУД fН4, поскольку при fН > fН4 единственная точка пересечения характеристик лежит на падающей ветви СХ ЧД и остаточная «расстройка» практически равна начальной (при fН = fН4 абсцисса точки 5 f'ОСТ fН5). Для определения полосы захвата допустим, что КР разомкнут (например, в точке 1, см. рис. 7.10, а) и fH fН3. Если после этого контур регулирования замкнуть, то состояние системы будет определяться координатами точки 3" и f"ОСТ fН5. Подобный режим будет существовать до тех пор, пока fН превышает fН2. Только при fН = fН2 остаточная «расстройка» станет равной f"'ОСТ и ЧАПЧ перейдет в эффективный стационарный режим – в обозначениях рис. 9,13, а) fЭ = fН2.
На рис. 7.13, б) сплошной линией обозначена характеристика регулирования fОСТ = Ф(fН), на которой показаны те же точки, что и на рис. 9,13, а). Штрих-пунктирная линия соответствует разомкнутому контуру регулирования. Характеристика регулирования неоднозначна, имеет гистерезис при f3 < fН < fУД. В этой области состояние системы зависит от предыстории процесса изменения начальной «расстройки» fН, что иллюстрируется стрелками на рис. 7.13, б). Штриховой отрезок характеристики регулирования не дает физически реализуемых положений ЧАПЧ, так как точки пересечения СХ ЧД и УЭ типа точки 3' на рис. 7.13, а) неустойчивы.
|
Рис.7.13,
б)
–
Статические характеристики ЧД
|
Сплошной линией обозначена характеристика регулирования fОСТ = Ф(fН) – имеет гистерезис при f3 < fН < fУД. Штрих-пунктирная линия соответствует разомкнутому контуру регулирования. |

Если частота fС отличается от fД, то для стационарного режима
fОСТ = [fН/(1 + SЧДSУЭ)] – SЧДSУЭ(fС +fД)/(1 + SЧДSУЭ).
При SЧДSУЭ » 1остаточная «расстройка» fОСТ изменяется на величину (fС +fД). Соответственно полосы захвата и удержания (f3 и fУД) изменяются на эту же величину.
Вывод из проведенного анализа – все характеристики стационарного режима ЧАПЧ не зависят от типа ФНЧ, а определяются только формой статических характеристик ЧД и УЭ.
Перейдем к определению характеристик стационарного режима ФАПЧ. Положим справедливыми те же предположения, что были сделаны при выводе (7.10). Тогда (7.9а) и (7.96) примут вид
d[(t)] /dt = fН + SУЭ[(t)]; (7.12а)
f = fН + SУЭ (f t). (7.126)
Из (7.12а) и (7.126) следует, что в стационарном режиме fОСТ = 0 независимо от fН. Статическая фазовая ошибка СТ постоянна и определяется fН при данных значении SУЭ и виде СХ ФД. Действительно, в левой части (7.126) f = const – постоянная величина, а в правой — периодическая функция времени (в силу цикличности фазы). Отсюда следует, что равенство (7.126) выполняется только при условии f = fОСТ = 0 и SУЭ(0) = –fН – при полной компенсации начальной «расстройки». Величина СТ может быть найдена из (7.12а) как корень алгебраического уравнения
fН + SУЭ (СТ) = 0. (7.13)
Выражение (7.13) получено из (7.12а) с учетом того, что (t) СТ и, следовательно, d[(t)] /dt = 0.
Дадим физическую трактовку полученных результатов. Для компенсации постоянной отличной от нуля начальной «расстройки» как в ЧАПЧ, так и в ФАПЧ по окончании переходных процессов должен вырабатываться постоянный не равный нулю сигнал управления ЕУ. При использовании ЧД это возможно только при f = const 0, т. е. при fПР fД или fПР.0 fД (для схем на рис. 7.10, а) и б) соответственно). Если же включен ФД, то соотношение ЕФД = const 0 может иметь место лишь при СТ = const 0, т. е. при fОСТ = 0 (fПР = fСР или fПР.0 = fСР), когда сравниваемые в фазовом детекторе колебания синхронны. Отсюда другое распространенное название установившегося режима в ФАПЧ – синхронный режим.
Статическая характеристика ФД может быть косинусоидальной функцией () = cos() – рис.7.11, б), тогда (7.12 а) имеет в вид
d[(t)] /dt = fН + fУДcos[(t)], (7.14)
где fУД = SУЭ ЕФДm. (7.15)