

Бородавкин В.А., Петрова И.Л. ТАУ дискретных систем / 14 Лекция
.doc
Лекция 14.
Оценка качества и синтез дискретных САУ
13.3 Коррекция импульсных систем.
Цифровые корректирующие фильтры осуществляются как дифференцирующие и интегрирующие.
Дифференцирующий фильтр первого порядка реализует разностное уравнение
![]()
Это соответствует приближенному разностному выражению производной от входной величины. Записав соотношение
![]()
при
нулевых начальных условиях, т.е.
![]() ,
получим передаточную функцию
дифференцирующего цифрового фильтра
первого порядка
,
получим передаточную функцию
дифференцирующего цифрового фильтра
первого порядка
![]()
Для практической реализации ее преобразуют к виду
![]()
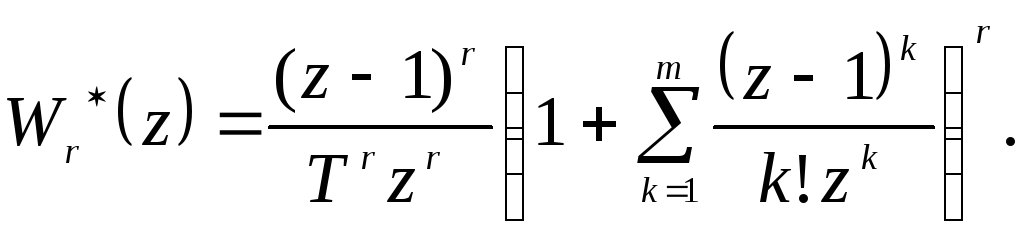
Чтобы цифровой фильтр первого порядка более точно реализовывал производную от входной величины, представляют его передаточную функцию в следующей форме:
![]()
где m – конечное число членов суммы, выбираемое из желаемой точности реализации производной.
Аналогично строится и дифференцирующий цифровой фильтр любого порядка r с передаточной функцией
Такие фильтры дают существенный эффект как при последовательном включении, так и в местных обратных связях. Они позволяют осуществлять также инвариантность по внешнему входному воздействию.
Интегрирующие цифровые фильтры первого порядка имитируют интеграл
![]()
в виде приближенного равенства
![]()
что соответствует приближенному интегрированию по методу прямоугольников.
Передаточная функция такого фильтра будет
![]()
Т.к. решение разностного уравнения, написанного выше, дает
![]()
то такой фильтр называют накопителем.
Существует другое выражение передаточной функции интегрирующего фильтра первого порядка
![]()
соответствующего приближенному интегрированию по методу трапеций.
Для цифрового интегрирующего фильтра второго порядка (при интегрировании по правилу Симпсона) передаточная функция получает вид
![]()
Последовательное включение интегрирующего фильтра повышает порядок астатизма системы, т.е. точность. Но, как было в непрерывных системах, при этом есть опасность ухудшить устойчивость системы. Для парирования этого недостатка применяется, как и прежде, изодромная коррекция, причем передаточная функция корректирующего устройства берется в виде
![]()
где k равно постоянной времени компенсирующего дифференцирующего устройства первого порядка.
Контрольная работа №3.
Вариант 1.
Задача №1.
Импульсной системе регулирования (рис.1) соответствует передаточная функция разомкнутой системы
![]()
где
![]() и
и
![]()
![]()



 g x y
g x y








Рис.1
Определить:
-
передаточную функцию замкнутой системы;
-
передаточную функцию относительно ошибки.
Задача 2.
Передаточная функция замкнутой системы
![]()
Определить первые коэффициенты ошибки с0 и с1 при Т0=0.1с.
Вариант 2.
Задача №1.
Передаточная функция замкнутой импульсной системы (рис.1)
![]()
![]()



 g x y
g x y








Рис.1
На
вход системы
поступает ступенчатая функция
![]()
Найти:
-
z-преобразование выходной величины Y(z);
-
z-преобразование ошибки Х(z).
Задача 2.
Передаточная функция замкнутой системы
![]()
Определить первые коэффициенты ошибки с0 и с1 при Т0=0.1с.