

![]()
Интеграл
![]() называется линейной интегральной
оценкой. Процесс будет тем лучше, чем
меньше число
называется линейной интегральной
оценкой. Процесс будет тем лучше, чем
меньше число![]() .
.
Однако такая оценка
не годится для колебательного процесса,
так как площади, расположенные ниже и
выше прямой х(),
будут иметь разные знаки. Поэтому по
минимуму величины
![]() наилучшим оказался бы процесс с
незатухающими колебаниями.
наилучшим оказался бы процесс с
незатухающими колебаниями.
В связи с этим в
общем случае принимают квадратичную
интегральную оценку качества в виде
![]()
Целесообразность
применения интегральных критериев
заключается в том, что в литературе
имеются формулы, выражающие
![]() (или другие интегральные оценки)
непосредственно через коэффициенты
дифференциального уравнения САУ.
(или другие интегральные оценки)
непосредственно через коэффициенты
дифференциального уравнения САУ.
Интегральные критерии качества используются для определения оптимальных значений варьируемых параметров по минимуму значения соответствующей интегральной оценки.
Применяются интегральные критерии обычно в теории оптимальных систем.
4.3. Последовательная коррекция динамических свойств
Коррекция динамических свойств осуществляется с целью выполнения требований по устойчивости и качеству переходного процесса.
Осуществляется коррекция с помощью введения в САУ специальных корректирующих звеньев. Эти звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им. Соответственно они и называются: последовательные либо параллельные корректирующие звенья.
Последовательные корректирующие звенья можно разделить на три типа: пропорционально-дифференцирующие (ПД), пропорционально-интегри-рующие (ПИ) и пропорционально-интегро-дифференцирующие (ПИД) звенья.
ПД-звено имеет передаточную функцию
WПД(p)![]()
то есть выходная величина этого звена пропорциональна входной величине и ее первой производной.
Включение этого звена в САУ приводит к тому, что передаточная функция разомкнутого контура САУ
![]()
умножается на WПД(p), то есть принимает вид
W(p) WПД(p)
В результате характеристический полином замкнутой САУ D(р) будет следующий:
![]()
где
![]()
Положим, что В(р)=k
(так как мы исследуем влияние ПД-звена,
то логично предположить, что в исходной
САУ такого звена не было, но тогда
числитель передаточной функции исходной
САУ содержит лишь величину k). Тогда
можно видеть, что в характеристическом
полиноме замкнутой САУ изменится
коэффициент при р в первой степени.
Включение двух ПД-звеньев приведет к
изменению коэффициента и при
![]() и т.д. Изменение же этих коэффициентов
изменяет условия устойчивости и качество
переходного процесса.
и т.д. Изменение же этих коэффициентов
изменяет условия устойчивости и качество
переходного процесса.
Рассмотрим в качестве примера применение данного звена для стабилизации, то есть обеспечения устойчивости САУ с астатизмом выше первого порядка (порядок астатизма - это число интегрирующих звеньев в приведенной одноконтурной САУ).
Передаточную функцию разомкнутой САУ с порядком астатизма, равным r, можно представить в виде:
Соответственно характеристический полином замкнутой САУ будет:
D(р)=В(р)+![]() .
.
Если В(р)=k, то из последнего выражения следует вывод о том, что САУ с порядком астатизма r>1 являются структурно неустойчивыми, поскольку в D(р) отсутствуют члены с р в степени от единицы до (r-1) (по критерию устойчивости Гурвица).
Введем теперь в систему (r-1) ПД-звеньев. При этом в характеристическом полиноме появятся недостающие звенья:
![]()
Следовательно, САУ становится структурно устойчивой.
Влияние ПД-звена на качество переходного процесса продемонстрируем на примере последовательного соединения этого звена с апериодическим звеном с передаточной функцией
Передаточная функция последовательного соединения этих звеньев:
W0(p)WПД(р)
Соответственно переходная функция
![]()
где ![]() -переходная функция
апериодического звена.
-переходная функция
апериодического звена.
Из последнего
выражения видно, что отрицательное
дополнительное воздействие по производной
снижает быстродействие, а положительное,
наоборот, повышает его. Например, при
![]() полностью компенсируется инерционность
апериодического звена:
полностью компенсируется инерционность
апериодического звена:
W0(p)WПД(р)
Реальные ПД-звенья обладают инерционностью, то есть имеют следующую передаточную функцию:
WПД(р)
где
ТПД
Все сказанное выше об идеальном ПД-звене справедливо и для реального с той только разницей, что реальное слабее влияет на быстродействие и на области устойчивости.
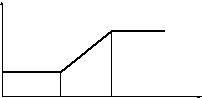
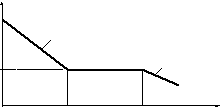
ЛАЧХ реального ПД-звена приведена на рис.4.10.
 G()
G()

+20 дБ/дек
![]()
0
![]()

![]()
Рис.4.10
ПД-звено является фильтром верхних частот, так как его ЛАЧХ растет с увеличением частоты. Поэтому введение этого звена в САУ расширяет ее полосу пропускания, повышает быстродействие.
Практически наиболее просто ПД-звенья реализуются в электрических системах постоянного тока, где они представляют собой пассивные RC- и RL- цепочки. Один из возможных вариантов представлен на рис.2.4.
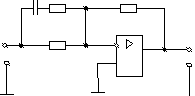
Пример реализации ПД-звена на операционном усилителе приведен на рис.4.11.
 С
R2
R3
С
R2
R3
R1
Uвх Uвых
Рис.4.11
![]()

![]()
![]()
Пропорционально-интегрирующее (ПИ) звено имеет передаточную функцию
WПИ(р)
В случае ТПИ=0 получаем идеальное ПИ-звено.
Последнее выражение можно представить так:
WПИ(р)
Таким образом, ПИ-звено эквивалентно последовательному соединению интегрирующего звена и ПД-звена. По своим частотным свойствам ПИ-звено противоположно ПД-звену, являясь фильтром нижних частот. ЛАЧХ ПИ-звена приведена на рис.4.12.
 G()
G()
20 дБ/дек
20 дБ/дек
![]()
0
![]()
 lg
lg
Рис. 4.12
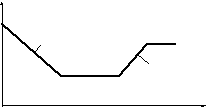
Передаточная функция пропорционально-интегро-дифференциру-ющего (ПИД) звена

Это звено эквивалентно последовательному соединению интегрирующего звена и пропорционально-дифференцирующего с воздействием по двум производным или, что то же самое, последовательному соединению ПИ-звена и ПД-звена с одной производной. Таким образом, ПИД-звено повышает порядок астатизма, как и ПИ-звено, но при этом одновременно дает более сильную коррекцию динамических свойств САУ.
Такое звено подчеркивает как нижние, так и средние частоты, подавляя средние, как видно из приближенной ЛАЧХ ПИД-звена, приведенной на рис.4.12.
 G
G
20 дБ/дек
+20 дБ/дек
0 lg
Рис.4.12
В связи с видом
ЛАЧХ ПИД-звеньями называют не только
звенья с указанной выше передаточной
функцией
![]() ,
но и любые другие звенья, ЛАЧХ которых
имеет минимум на средних частотах и
растет в сторону как низких, так и высоких
частот.
,
но и любые другие звенья, ЛАЧХ которых
имеет минимум на средних частотах и
растет в сторону как низких, так и высоких
частот.
Вообще указанные выше наименования типов последовательных корректирующих звеньев в значительной степени условны, прежде всего, из-за инерционности реальных корректирующих звеньев.
Наиболее просто синтез последовательного корректирующего устройства можно произвести по ЛАЧХ. Для этого необходимо использовать ЛАЧХ нескорректированной САУ Gнескорр() и желаемую ЛАЧХ, Gскорр() соответствующую заданному переходному процессу. ЛАЧХ Gскорр() получают с помощью частотного критерия качества, иллюстрированного приведенными выше графиками (см. рис.4.7, рис.4.8).
При последовательном соединении звеньев справедливо соотношение
Wскорр(р)= Wнескорр(р)Wку(р),
где Wку(р) - передаточная функция синтезируемого последовательного корректирующего устройства.
Следовательно
Wку(р)= Wскорр(р)/ Wнескорр(р).
Перейдем к частотной форме записи, используя логарифмические единицы:
20lg| Wку(р)(j)|=20lg| Wcкорр.(j)|20lg| Wнескорр.(j)|;
Gку()=Gскорр.() Gнескорр.().
Тип и параметры последовательного корректирующего устройства получают следующим образом:
1) графически вычитают из желаемой ЛАЧХ ординаты ЛАЧХ исходной системы;
2) упрощают ЛАЧХ корректирующего устройства, сравнивают с ЛАЧХ имеющихся в справочных данных типовых корректирующих звеньев и выбирают конкретную схему корректирующего звена;
3) находят по сопрягающим частотам параметры схемы корректирующего устройства.