

6.5. Корневые оценки качества
Корневые критерии качества основываются на исследовании расположения корней характеристического уравнения замкнутой системы, то есть полюсов передаточной функции системы, а также и нулей этой передаточной функции.
Вид корней характеристического уравнения определяет характер переходных процессов в системе автоматического управления. Поэтому можно сформулировать требования по запасу устойчивости и быстродействию системы, не рассматривая самих переходных процессов, а накладывая ограничения на корни характеристического уравнения.
Для оценки быстродействия системы используется понятие степени устойчивости, являющейся простейшей корневой оценкой качества.
Под степенью устойчивости понимается абсолютное значение вещественной части ближайшего к мнимой оси корня (рис.6.5).
Если ближайшим является вещественный корень, то такая степень устойчивости называется апериодической, так как ей соответствует апериодическая составляющая переходного процесса с1et. Время ее затухания характеризует общую длительность переходного процесса, так как все члены решения, соответствующие остальным корням, затухают быстрее, т.е.
tp 3/. (6.25)
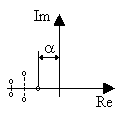
Рис. 6.5. Комплексная плоскость корней
Если ближайшем к мнимой оси окажется пара комплексных корней, то ей соответствует колебательная составляющая переходного процесса с1etsin(t+1), при этом оценка длительности переходного процесса остается прежней. Такая степень устойчивости называется колебательной.
Для оценки запаса устойчивости системы введено понятие колебательности переходного процесса.
Колебательность определяется величиной
![]() ,
(6.26)
,
(6.26)
где и вещественная и мнимая части корней характеристического уравнения. Именно эта величина характеризует быстроту затухания колебаний за каждый период T=2/. Чем выше колебательность, тем слабее затухание колебаний в переходном процессе.
Суммарное требование определенных значений степени устойчивости и колебательности приводит к области, изображенной на рис.6.6, внутри которой должны располагаться все корни характеристического уравнения замкнутой системы.
Далее необходимо иметь в виду, что для определения качества переходного процесса при единичном скачке задающего воздействия существенны не только корни характеристического уравнения, т.е. полюса, но также и нули передаточной функции замкнутой системы.

Рис. 6.6. Область расположения корней:
где зиз заданные значения степени устойчивости и колебательности
Для уменьшения амплитуд отклонений выходной величины системы в переходном процессе желательно, чтобы нули передаточной функции замкнутой системы располагались вблизи ее полюсов.
Примером корневых оценок качества переходного процесса в системах третьего порядка является диаграмма Вышнеградского (дана в его работе 1876 г., положившей начало развития теории управления) [1,2].
Задание области расположения полюсов и нулей позволяет более полно оценить вид переходного процесса. При выборе расположения полюсов и нулей передаточной функции необходимо придерживаться общих рекомендаций [1].
1. Желательно располагать нули вблизи области расположения полюсов. Удаление нулей от полюсов ведет к увеличению амплитуд собственных колебаний в переходном процессе.
2. Для уменьшения отклонений в переходном процессе выгодно удалять полюсы друг от друга.
3. Приближение друг к другу не представляет опасности для тех полюсов, которые расположены далеко от мнимой оси.
Кроме этих рекомендаций сохраняют свою силу ограничения на область расположения полюсов, накладываемые в связи с требованием обеспечения определенного запаса устойчивости и быстродействия.