

Расчетно-графическая работа / РГР 4
.doc


СОДЕРЖАНИЕ
1 КОНСТРУКТИВЕАЯ СХЕМА САУ. КРАТКОЕ ОПИСАНИЕ НАЗНАЧЕНИЯ И ПРИНЦИПА ДЕЙСТВИЯ САУ. 2
2 ФУНКЦИОНАЛЬНАЯ СХЕМА СКОРРЕКТИРОВАННОЙ САУ 5
3 СТРУКТУРНАЯ СХЕМА СКОРРЕКТИРОВАННОЙ САУ. 9
4 РАСЧЕТ НАСТРОЙКИ РЕГУЛЯТОРА САУ НА ТЕХНИЧЕСКИЙ И СИММЕТРИЧНЫЙ ОПТИМУМЫ. 10
5 ИССЛЕДОВАНИЕ КАЧЕСТВА РЕГУЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ. 13
1 КОНСТРУКТИВЕАЯ СХЕМА САУ. КРАТКОЕ ОПИСАНИЕ НАЗНАЧЕНИЯ И ПРИНЦИПА ДЕЙСТВИЯ САУ.
На рисунке 1 представлена схема обработки на токарном станке с САУ скоростью резания при точении.
С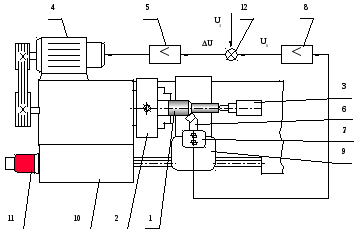 АУ
скоростью резания при точении
предназначена для стабилизации либо
изменения по введенному закону силы
резания.
АУ
скоростью резания при точении
предназначена для стабилизации либо
изменения по введенному закону силы
резания.
Рисунок 1 - Система автоматического управления скоростью резания при точении
Обрабатываемая деталь 1 установлена в патроне 2 и в заднем центре 3 токарного станка. В качестве двигателя 4 главного движения используется двигатель постоянного тока, для питания которого служит тиристорный усилитель-преобразователь 5. Резец 6 установлен в тензометрическом динамометре 7, который связан с усилителем 8. В качестве преобразователя силы может быть использован динамометр другого типа, например, магнитоупругий. Суппорт 9 станка получает продольную подачу от коробки передач 10 с автономным двигателем 11. В систему входит сравнивающие устройство 12.
САУ работает следующим образом. На вход сравнивающего устройства 12 подается сигнал UЗ, в определенном масштабе соответствующий требуемой силе резания (ее составляющая РУ). Составляющая РУ силы резания воздействует на динамометр 7 и на его выходе появляется сигнал в виде напряжения, пропорционального РУ. Этот сигнал через усилитель 8 поступает на другой вход сравнивающего устройства 12. Ошибка с устройства 12 поступает на вход усилителя – преобразователя 5, который вырабатывает соответствующее напряжение питания двигателя 4. Скорость двигателя 4, а следовательно, и скорость резания, изменяется так, чтобы ошибка системы была минимальной. Таким образом, САУ за счет управления по скорости резания автоматически осуществляет стабилизацию силы резания на заданном уровне.
В качестве объекта управления САУ включает в себя процесс резания в замкнутой технологической системе станка.
На точность обработки при точении большое влияние оказывает сила резания, в частности, ее составляющая РУ. Вследствие случайных колебаний припуска, твердости заготовки, затупления резца и других факторов сила резания при точении непостоянна, что приводит к изменению упругих деформаций технологической системы станка и образованию погрешностей обработки.
Значительно повысить точность токарной обработки можно за счет стабилизации силы резания. Кроме того, при обработке механических деталей без люнета для устранения погрешности, вызванной упругими деформациями, необходимо регулировать силу резания по определенному закону в зависимости от способа закрепления детали в месте точения.
Таблица 1 – Исходные данные.
-
СPY
ХPУ
УРУ
n
об/мин
t0,
мм
V,
м/мин
KV
С,
Н/мм
S,
мм/мин
103
0,8
0,5
0,4
5
100
1,3
6·104
0,2
КЭУ
КТП
K n ,
B/H
ТЯ ,
с
ТМ ,
с
ТТП ,
с
КД ,
1/сВ
КР
D,
мм
100
70
2·10-2
0,02
0,15
0,02
2,2
0,8
100
2 ФУНКЦИОНАЛЬНАЯ СХЕМА СКОРРЕКТИРОВАННОЙ САУ
Функциональная схема САУ представлена на рисунке 2.
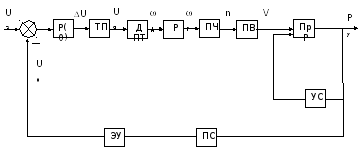
Рисунок 2 - Функциональная схема САУ.
где Р(0) – регулятор;
ТП – тиристорный усилитель-преобразователь
ДПТ – двигатель постоянного тока;
Р – редуктор, коробка скоростей;
ПЧ – преобразователь частоты;
ПВ – преобразователь вращения;
ПрР – процесс резания;
УС – упругая связь;
ПС – преобразователь силы;
ЭУ – электронный усилитель;
UЗ – напряжение заданное, В;
U – разность напряжений, В;
UЯ – напряжение якоря, В;
U0 – сигнал обратной связи, В;
Д – выходная угловая скорость двигателя, с-1 ;
Р – угловая скорость редуктора, с-1 ;
n – частота вращения шпинделя, об/мин
V – скорость вращения шпинделя, м/мин
Py – сила резания, Н.
Передаточная функция регулятора:
![]()
где Кр(0) – коэффициент регулятра ;
Передаточная функция тиристорного преобразователя:
![]() ;
;
где ТТП - постоянная выхода тиристорного преобразователя, с ;
КТП - коэффициент передачи (усиления);
![]() .
.
Передаточная функция двигателя постоянного тока:
![]() ;
;
где ТЯ - электромагнитная постоянная времени якоря, с ;
ТМ - электромеханическая постоянная двигателя, с ;
КД - коэффициент передачи электродвигателя, 1/сВ;
![]() .
.
Передаточная функция редуктора:
![]() ;
;
где KР – коэффициент резания;
![]() .
.
Передаточная функция преобразователя частоты:
![]() ;
;
где Р - угловая скорость редуктора, с-1 ;
П – const, П = 3,14;
![]() .
.
Передаточная функция преобразователя вращения:
![]() ;
;
где V - скорость вращения шпинделя, м/мин;
n – частота вращения шпинделя, об/мин;
d – диаметр заготовки, мм;
![]() .
.
Передаточная функция процесса резания по подаче:
![]() ;
;
где S – подача, мм/мин;
УРУ – выходная величина;
![]() .
.
Передаточная функция процесса резания по скорости:
![]() ;
;
где V - скорость вращения шпинделя, м/мин;
![]() .
.
Передаточная функция процесса резания по глубине резания:
![]() ;
;
где t – припуск обработки, мм;
![]() .
.
Передаточная функция процесса резания по силе резания:
![]() ;
;
где KV – коэффициент скорости;
![]() .
.
Передаточная функция преобразователя силы:
![]()
где Кn - коэффициент передачи, В/рад ;
Передаточная функция электронного усилителя:
![]() ;
;
где КЭУ - коэффициент усиления .
3 СТРУКТУРНАЯ СХЕМА СКОРРЕКТИРОВАННОЙ САУ.
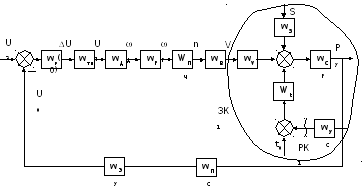
Рисунок 3 – Структурная схема САУ.
Определяем передаточные функции звеньев : РК1 , ЗК1 , РК2 , ЗК2
![]() ;
;
![]() ;
;
![]()
![]()
![]() ;
;
![]()

![]() .
.
а0 = 0,00006; а1 = 0,006; а2 = 0,17; а3 = 98937;
4 РАСЧЕТ НАСТРОЙКИ РЕГУЛЯТОРА САУ НА ТЕХНИЧЕСКИЙ И СИММЕТРИЧНЫЙ ОПТИМУМЫ.
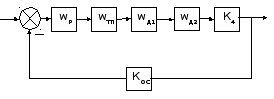
Рисунок 4 – Блок-схема САУ
![]()
где КР – коэффициент резания;
КП - коэффициент передачи, В/рад ;
KV – коэффициент скорости;
WЗК1 – передаточная функция замкнутого контура 1;
![]()
![]()
где КЭУ - коэффициент усиления;
![]()
Передаточные функции звеньев:
![]()
![]()
![]()
где ТЯ - электромагнитная постоянная времени якоря, с ;
ТМ - электромеханическая постоянная двигателя, с ;
ТМ – «большая», должна быть компенсирована.
![]() и
и
![]()
Передаточная функция объекта регулирования:
![]()
где КД - коэффициент передачи электродвигателя, 1/сВ;
![]()
![]()
Передаточная функция некомпенсированного звена:
![]()
где КН – коэффициент некомпенсированного звена;
![]()
Т - малая постоянная времени:
![]()
![]()
Настройка на технический оптимум с П-регулятором.
![]()
Передаточная функция разомкнутого контура:
![]()
Передаточная функция замкнутого контура:
Настройка на симметричный оптимум с ПИ-регулятором
![]()
![]()
![]()

![]()
а0 = 0,0005; а1 = 0,0128; а2 = 0,16; а3 = 1.
![]()
5 ИССЛЕДОВАНИЕ КАЧЕСТВА РЕГУЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ.
Разработка блок-схем САУ с различными регуляторами и различными вариантами представления ДПТ в пакете Matlab.

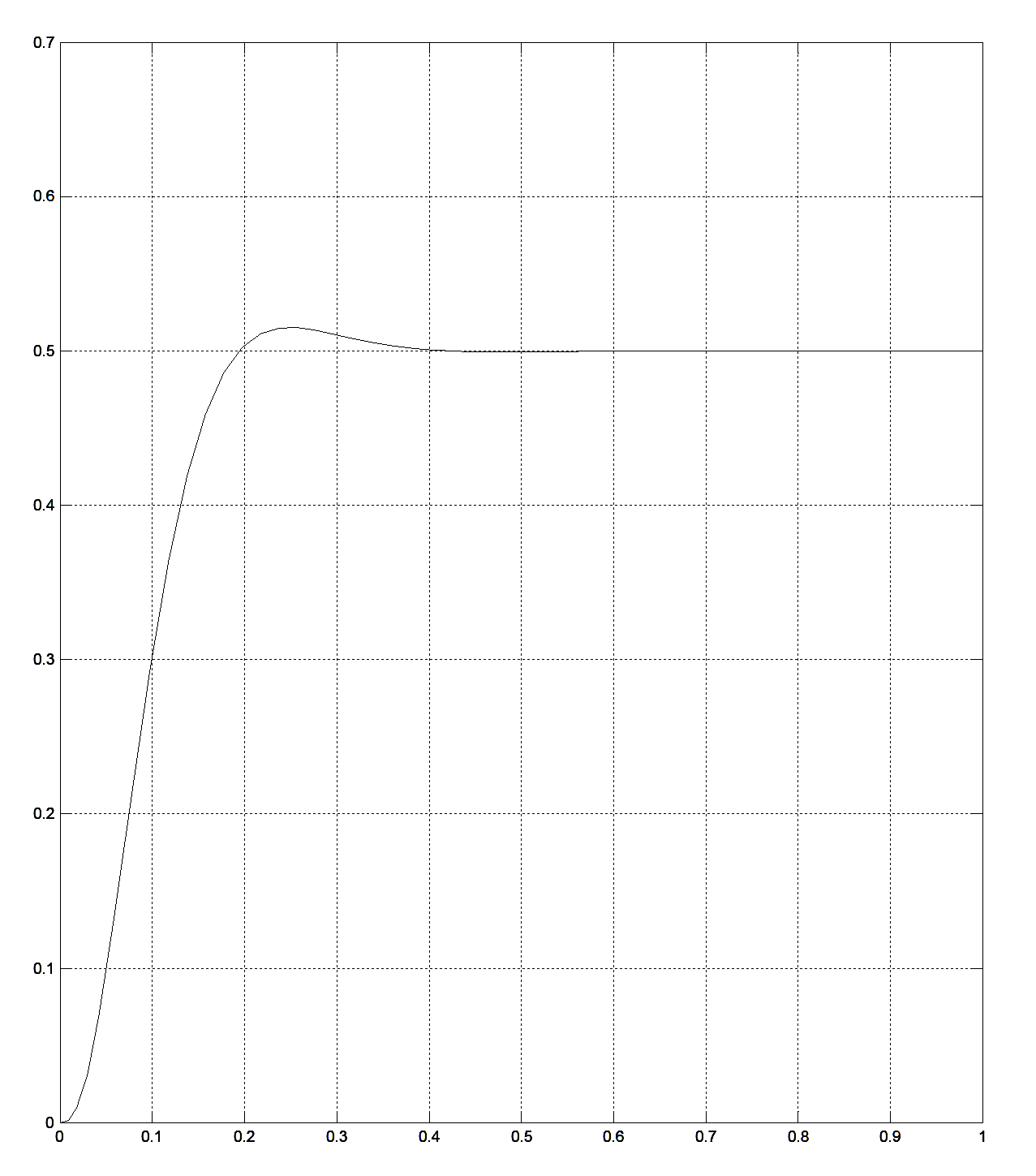
Рисунок 5 – Блок-схема и график САУ с П-регулятором.
Время
переходного процесса
![]()
Максимальная
величина отклонения силы резания
![]()
Установившаяся
величина отклонения силы резания
![]()
Число колебаний N = 1
Перерегулирование
![]()
Статизм
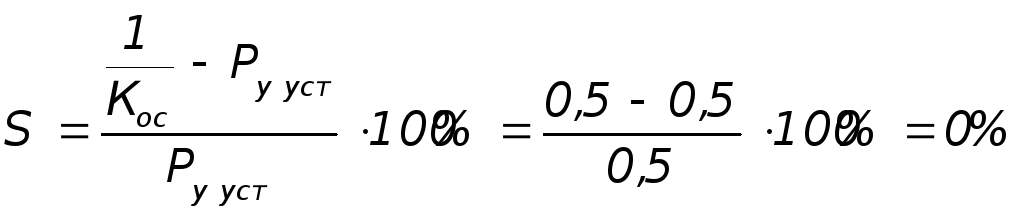
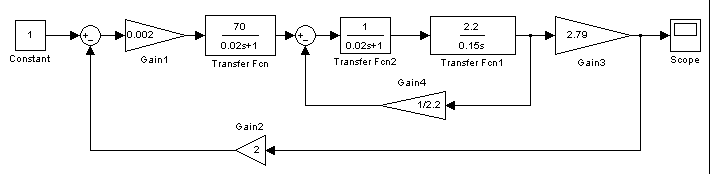
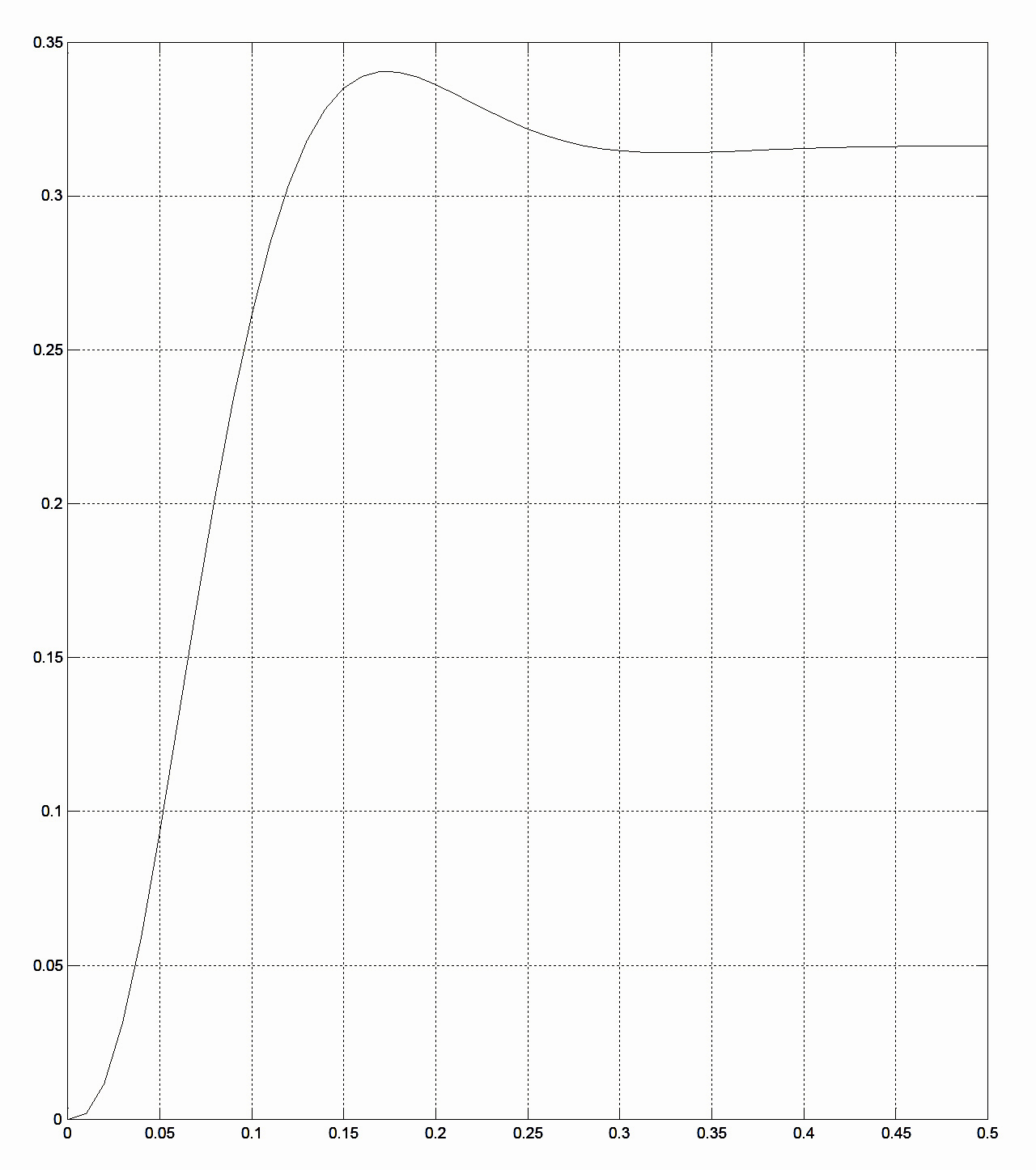
Рисунок 6 – Блок-схема и график САУ с П-регулятором и обратной связью.
Время
переходного процесса
![]()
Максимальная
величина отклонения силы резания
![]()
Установившаяся
величина отклонения силы резания
![]()
Число колебаний N = 2
Перерегулирование
![]()
Статизм



Рисунок 7 – Блок-схема и график САУ с ПИ-регулятором.
Время
переходного процесса
![]()
Максимальная
величина отклонения силы резания
![]()
Установившаяся
величина отклонения силы резания
![]()
Число колебаний N = 1
Перерегулирование
![]()
Статизм

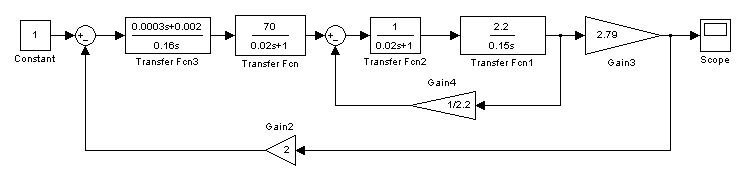
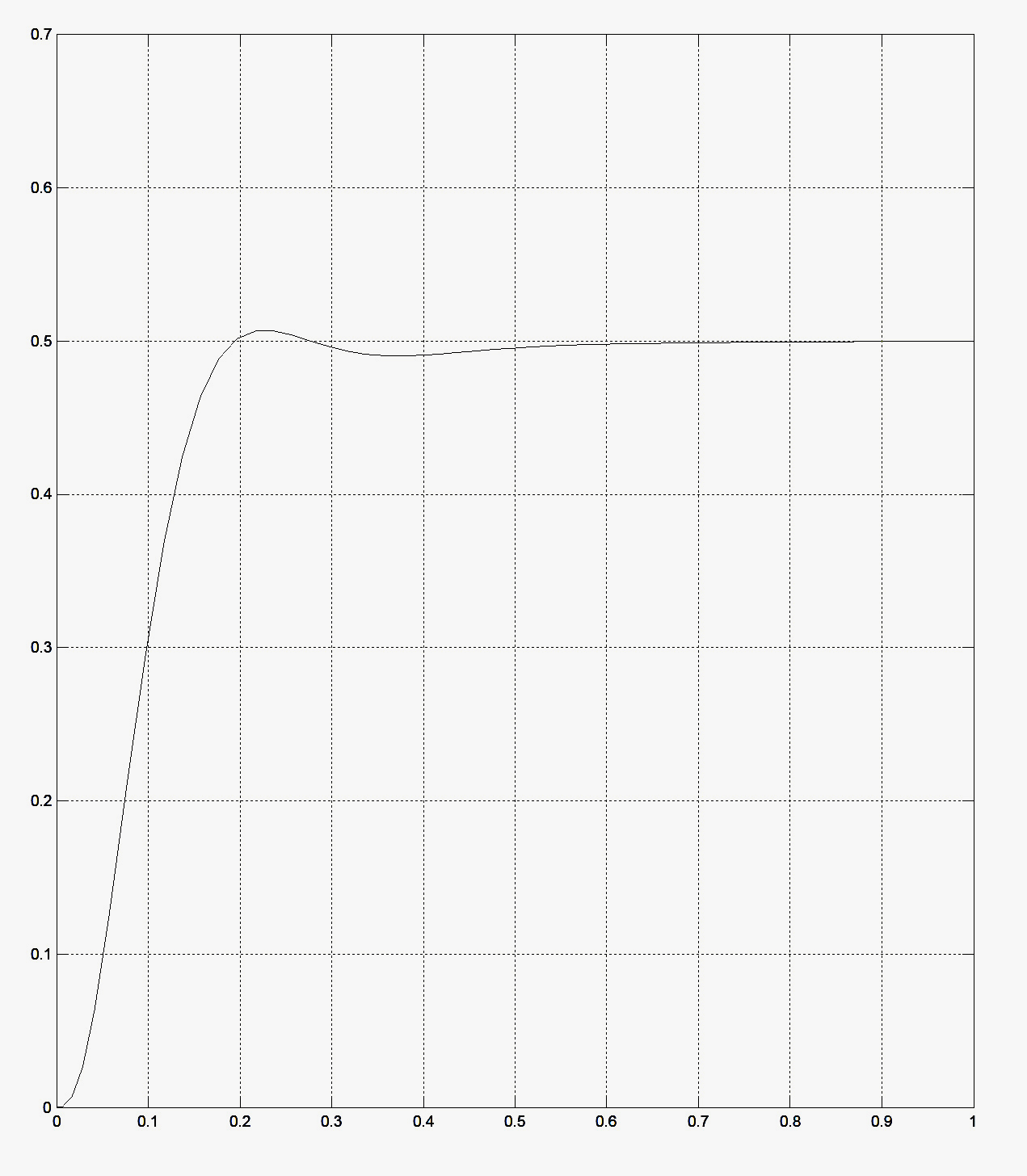

Рисунок 8 – Блок-схема и график САУ с ПИ-регулятором и обратной связью.
Время
переходного процесса
![]()
Установившаяся
величина отклонения силы резания
![]()
Число колебаний N = 1
Перерегулирование
![]()
Статизм

Вывод.
|
|
|
|
|
|
|
Лист |
|
|
|
|
|
|
|
|
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |