

Задание и исходные данные.
1.1 Задание.
По представленным данным выполнить анализ статических (установившихся ошибок) и динамических (показатели качества переходных процессов) режимов работы системы с исходными параметрами. Статические ошибки вычисляются аналитически вручную и с помощью КМС (компьютерной математической системы). Анализ качества переходных процессов выполняется по результатам моделирования на компьютере в среде КМС.
1.2 Исходные данные.
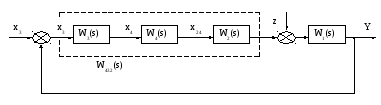
Задана система автоматического управления (рис.1), состоящая из 4-х элементов (рис.2, i=1,2,3,4), где приняты следующие обозначения: x - задающее воздействие; у -управляемая величина; z - возмущающее воздействие; xl- входное воздействие i-ro элемента; yl - выходная величина i -ro элемента.
Wi(s)
САУ




Рис.1 Рис.2
Элемент i =1 является объектом управления. Остальные элементы относятся к управляющей части САУ.
Динамические свойства элементов в общем случае описываются дифференциальными уравнениями: (1)-(4)
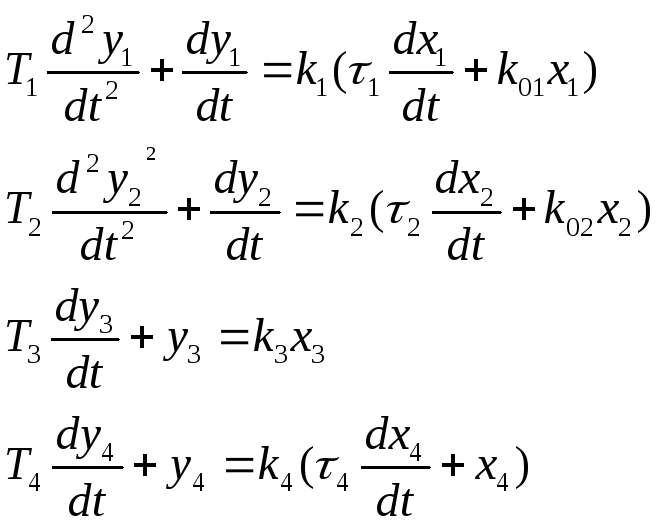
(1)
(2)
(3)
(4)
Уравнения связей:
x1 =y2 –z;
x2 = y4;
x3 = x – y;
x4 = y3 – y4
где: x – задающее воздействие;
y – управляемая величина;
z – возмущающее воздействие.
Исходные значения параметров элементов:
1) k1 = 0,8; 1 = 1; T1 = 1,2; k01 = 0
2) k2 = 0,4; 2 = 0; T2 = 0; k02 = 1,0
3) k3 = 0,9; T3 = 0;
4) k4 = 0,9; 4 = 0,7; T4 = 0,5;
где k – коэффициент передачи звена;
Т – постоянная времени;
- время запаздывания.
I. Анализ исходной системы
1. Конкретизировал выражения уравнений (1) - (4), подставив в них из табл.2 соответствующие варианту значения коэффициентов k0l, k02 и равные нулю постоянные времени Tl, l.
Полученные дифференциальные уравнения записал в операторной форме. При наличии общего множителя в виде оператора дифференцирования в левой и правой частях этих уравнений произвел сокращение. По полученным дифференциальным уравнениям записал выражения передаточных функций и для наглядности вписал их в символы элементов на структурной схеме.(Рис. 4)
Решение: Используя оператор s получим:
T1 s2 Y1(s) + s Y(s) = k1 ( 1s x1(s) + k01 x1(s) )
Y1(s) (T1s2 +s) = k1 x1(s)( 1s + k01 )
![]()
T2 s2 Y2(s) + s Y2(s) = k2 ( 2s x2(s) + k02 x2(s) )
Y2(s) (T2s2 +s) = k2 x2(s)( 2s + k02)
![]()
T3 s Y3(s) + Y3(s) = k3 x3
Y3(s) (T3 s + 1) = k3 x3(s)
![]()
T4 s Y4(s) + Y4(s) = k4 ( 4s x4(s) + x4(s) )
Y4(s) (T4s + 1) = k4 x4(s)( 4s + 1)
![]()
Используя уравнения связей из табл.1, где для каждого элемента определены входные воздействие в виде комбинации выходных величин других элементов, построил структурную схему (Рис.3).

z
W4(s)
W2(s)
W1(s)
W3(s)









 x x y3 x4
x2 y2 x1
x x y3 x4
x2 y2 x1



 y4 Y1
y4 Y1
y

![]() Рис.3
Исходная структурная схема САУ
Рис.3
Исходная структурная схема САУ
Расчет передаточной функции с помощью средств КМС (компьютерной математической системы):

Вывод: результат, полученный вручную, совпадает с результатом, который был получен средствами КМС (компьютерной математической системы).



 W2(s) W1(s)
W2(s) W1(s)
0,9
![]()
![]()
![]()








x







Апериодическое
1-го порядка
усилительное
интегрирующее
 W4(s)
W4(s)
Усилительное звено
и два апериодических 1-го порядка

Рис. 4 Структурная схема с вписанными значениями передаточных функций
Передаточная функция четвертого звена W4(s) (см рис.4), охваченного обратной связью будет равна:

-Расчет передаточной функцииW4(s) с помощью средств КМС (компьютерной математической системы):
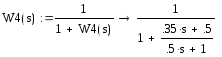
![]()
При последовательном соединении звеньев W3(s), W4(s), W2(s) общая передаточная функция их будет равна:
![]()
Расчет передаточной функции W234(s) с помощью средств КМС (компьютерной математической системы):
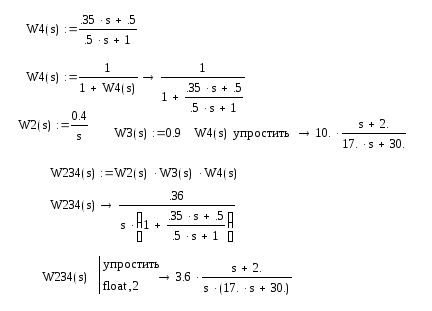
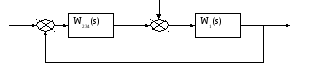
Рис.5 Упрощенная структурная схема САУ
2. Преобразовал пошагово исходную структурную схему САУ к одноконтурной (Рис.5) и определил передаточную функцию разомкнутой системы Wpaз(s), выделив в ней коэффициент передачи разомкнутой системы kpaз

W24(s)
W1(s)

 x x1 Y1
x x1 Y1





Рис.6 Одноконтурная разомкнутая структурная схема САУ
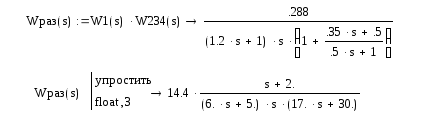
Передаточная функция разомкнутой САУ расчитывается так:

Расчет передаточной функции Wраз(s) с помощью средств КМС (компьютерной математической системы):
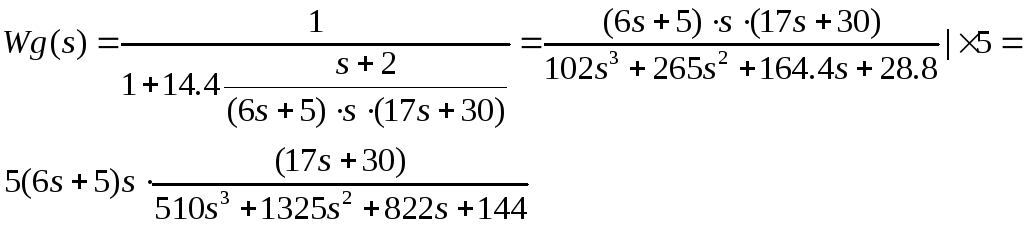
3.Определил передаточные функции а)замкнутой системы; б) по задающему Wg(s); в) по возмущающему Wz(s) воздействиям, записал уравнения замкнутой системы в операторном и дифференциальном виде.
а) расчет передаточной функции замкнутой системы

W234(s)
W1(s)

 x x1 Y1
x x1 Y1






y

Рис.7 Замкнутая структурная схема САУ
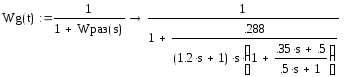
Передаточная функция замкнутой САУ рассчитывается так:
![]()

Расчет передаточной функции Wзам(s) с помощью средств КМС (компьютерной математической системы):

![]()
Отсюда, kраз= 0.72 -коэффициент передачи разомкнутой системы.
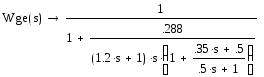
б) Расчет передаточной функции по задающему воздействию g(s)

g

 (s)X(s)
(s)X(s)


z
W1(s)
W432(s)





Рис. 8 Структурная схема САУ по задающему воздействию.
Расчет передаточной функции по задающему воздействию производится по следующей формуле:
![]()
Теперь подставим в эту формулу значение передаточной функции разомкнутой системы Wраз(s):
![]() -
передаточная функция ошибки по задающему
воздействию в операторном виде.
-
передаточная функция ошибки по задающему
воздействию в операторном виде.
![]() -
передаточная функция ошибки по задающему
воздействию в дифференциальном виде.
-
передаточная функция ошибки по задающему
воздействию в дифференциальном виде.
Расчет передаточной функции
![]() с
помощью средств КМС (компьютерной
математической системы):
с
помощью средств КМС (компьютерной
математической системы):
![]()
в) Расчет передаточной функции по возмущающему воздействию z(t)
z(t)Y(s)
W1(s)





W432(s)


Рис. 9 Структурная схема САУ по возмущающему воздействию.
Расчет передаточной функции по возмущающему воздействию производится по следующей формуле:
![]() -передаточная функция по
возмущающему воздействию.
-передаточная функция по
возмущающему воздействию.
Теперь подставим в эту формулу значения уравнений передаточных функций Wраз(s) иW1(s):
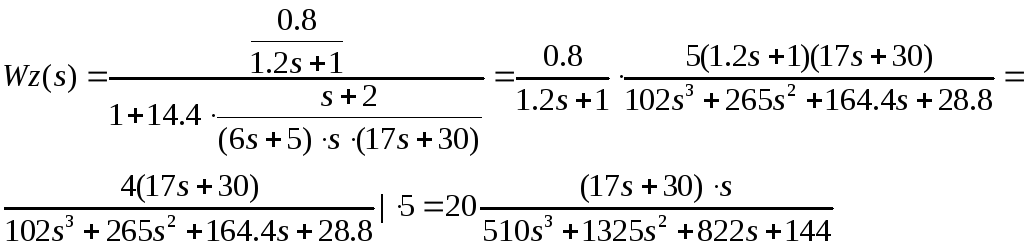
![]() -
передаточная функция ошибки по
возмущающему воздействию в операторном
виде.
-
передаточная функция ошибки по
возмущающему воздействию в операторном
виде.
![]() - передаточная функция ошибки по
возмущающему воздействию в дифференциальном
виде.
- передаточная функция ошибки по
возмущающему воздействию в дифференциальном
виде.
Расчет передаточной функции
![]() с
помощью средств КМС (компьютерной
математической системы):
с
помощью средств КМС (компьютерной
математической системы):

![]()
4. Определил передаточные функции по ошибке, вызванной задающим и возмущающим воздействиям.
а) По ошибке, вызванной задающим воздействием

g

 (s)Ez
(s)
(s)Ez
(s)


W1(s)
W234(s)




Рис 10 Структурная схема САУ по ошибке, вызванной задающим воздействием.

![]()
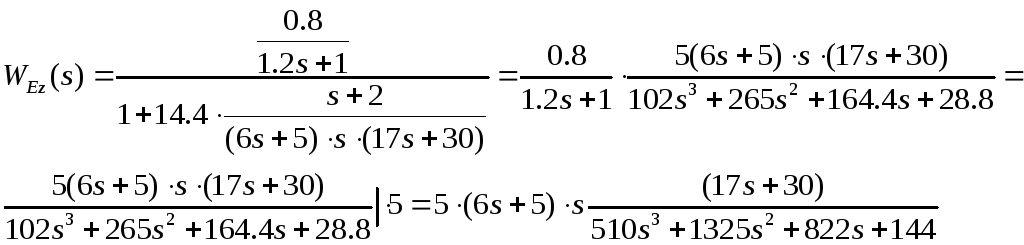
б) По ошибке, вызванной возмущающим воздействием
Ex Z
W1(s)





(-)
W234(s)


Рис 11. Структурная схема САУ по ошибке, вызванной возмущающим воздействием.
Расчет передаточной функции по ошибке, вызванной возмущающимвоздействием, производится по следующей формуле:
![]()
Теперь подставим в эту формулу значения уравнений передаточных функций Wраз(s) иW1(s):
Расчет передаточной функции
![]() с
помощью средств КМС (компьютерной
математической системы):
с
помощью средств КМС (компьютерной
математической системы):
![]()
![]()
5. Пользуясь теоремой о конечном значении, вычислил установившиеся (статические) ошибки по задающему и возмущающему воздействиям, приняв для задающего и для возмущающего воздействия - только ступенчатую функцию. Статические ошибки определил в процентном отношении к модулю ступенчатого воздействия и скорости изменения линейного воздействия. На основе результатов расчета статических ошибок установил тип САУ.
На основе теоремы о конечном значении нетрудно вычислить установившееся значение:
![]()
Статическая ошибка по возмущающему воздействию:
Рассчитаем ошибку по положению. Для этого воспользуемся формулой.
Зная что ступенчатая функция в операторной форме : (t) = > 1/s и
![]() -
передаточная функция по
возмущающему воздействию
-
передаточная функция по
возмущающему воздействию
Найдем ошибку:
![]()
Рассчитаем ошибку по скорости. Для этого воспользуемся формулой: (t) = > 1/s2
![]()
где (s) – передаточная функция по ошибке, вызванной возмущающим воздействием.
Вывод: ошибка системы по скорости не равна нулю, поэтому система – астатическая первого порядка.
2) Статическая ошибка по задающему воздействию:
Зная что ступенчатая функция в операторной форме : (t) = > 1/s и
![]() -
передаточная функция по задающему
воздействию
-
передаточная функция по задающему
воздействию
Найдем ошибку: ![]()
Рассчитаем ошибку по скорости. Для этого воспользуемся формулой: (t) = > 1/s2
![]()
где (s) – передаточная функция по ошибке, вызванной задающим воздействием.
Вывод: ошибка системы по скорости не равна нулю, поэтому система – астатическая первого порядка.