

Курсовой проект / МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
Учреждение образования
«Витебский государственный технологический университет»
Кафедра теоретической механики и теории механизмов и машин
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту по ТММ
Тема: «Синтез и анализ механизмов»
Исполнитель:
Студент гр.ТМС-2
Бухавцов С.Г.
Шифр 06672
Руководитель:
доцент Сёмин А.Г.
Витебск 2008
|
СОДЕРЖАНИЕ
|
|
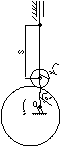
Задание на лист 1 и 2: Заданы следующие параметры кривошипно-ползунного механизма ( рис 1.1 ): lОА =170 мм = 0,17 м ; lАВ =500 мм = 0,5 м ; lВС =250 мм = 0,25 м; е =100 мм = 0,1 м угловая скорость кривошипа ω1 = 12 с-1 = const. Направление движения кривошипа против часовой стрелки m3 = m2 , где m3 – масса ползуна 3; m2 – масса шатуна 2 Р = 2F1 , где F1 – сила инерции кривошипа 1;
q
= 10
Рисунок 1.1
Задание на лист 3 Заданы следующие параметры центрального кулачкового механизма с поступательно движущимся толкателем (рис. 1.2 ): безмасштабный график скорости толкателя ( рис. 1.3 ); ход ( максимальное перемещение ) толкателя S = 60 мм; радиус ролика r = 15 мм; минимальный радиус кулачка r0 = 30 мм; угловая скорость кулачка ω0 = 100 c-1. Направление движения кулачка против часовой стрелки
Рисунок 1.2 Рисунок 1.3
|
|
2.1 Построение плана 12 положений механизма Определяем масштабный коэффициент длин, представляющий собой отношение действительной длины в метрах к длине отрезка на чертеже в миллиметрах. Изображаем длину кривошипа lОА на чертеже отрезком l′ОА , равным 51 мм. Тогда масштабный коэффициент будет иметь величину:
μl
=
Остальные длины звеньев, изображенные на чертеже, будут иметь следующие значения:
l′АВ
=
е′
=
Из произвольной точки О откладываем отрезок lОА = 51 мм . Далее проводим горизонтальную прямую Х , отстоящую от точки О по вертикали на величину е′. Из точки А раствором циркуля, равным l′АВ , на оси Х делаем засечку, получая точку В. На продолжении линии АВ откладываем расстояние l′ВС и отмечаем точку С. Указываем положение центров масс S1, S2, S3,( для положений механизма 2 и 7 ) которые находятся в серединах отрезков ОА, АС, и в точке В. Аналогичным образом строим и другие положения механизма, которые отличаются величинами угла φ1. Получаем план 12 положений механизма ( рис. 2.1). Положение механизма 2 и 7 выделяем толстыми линиями.
|
|
2.2 Построение плана скоростей положения механизма №2 Отдельно вычерчиваем положение механизма №2 ( рис.2.2) Определяем скорость точки А.
VA
= ω1∙
lОА
= 12 ∙
0,17 = 2,04
Находим масштабный коэффициент скоростей, для чего полученную величину делим на длину вектора этой скорости, выбранную равной ра = 150 мм.
μV
=
Из произвольной
точки р
(полюса скоростей) проводим вектор
Здесь точка В′ принадлежит стойке Х.
Так как скорости
точек О
и В′
равны
нулю, то точки о
и b′
помещаем в полюсе. Уравнения решаются
так. Из точки а
проводим
линию, перпендикулярную шатуну АВ,
а из полюса - прямую, параллельную
стойке Х.
На пересечении ставим стрелки, получая
векторы скоростей
Откладываем
эту величину на продолжении линии аb.
Полученную точку соединяем с полюсом,
получая вектор скорости
VB
= pb
∙
μ
V
= 135,5 ∙
0,0136 = 1,8
VВА
= ba
∙
μ
V
= 75,5 ∙
0,0136 = 1
VC
=
pc
∙
μ
V
= 145,5 ∙
0,0136 = 2
Находим угловую скорость ω2 шатуна:
ω2
=
Направление
этой скорости можно найти, поместив
вектор
Угловая скорость ω3 ползуна равна нулю. |
|
2.3 Построение плана ускорений положения механизма №2 Ускорение точки А в общем случае складывается из двух составляющих:
āА
=
Следовательно,
аА
=
Масштабный коэффициент ускорений можно найти путем деления этой величины на длину πа вектора āА на чертеже, равную 150 мм.
μА
=
Ускорение точки А направлено параллельно кривошипу ОА от точки А к центру О. Из произвольной точки π ( полюса ускорений ) ( рис. 2.4) проводим вектор āА длиной 150 мм . Ускорение точки В находим графоаналитически, решая систему векторных уравнений:
āВ
= āА
+
Ускорения ā0 и āВ′ равны нулю, поэтому точки 0 и b′ помещаем в полюсе.
Определяем
ускорение
Это ускорение направлено параллельно шатуну ВА от точки В к точке А. Длина вектора этого ускорения:
ат
=
В конце вектора
Точку с соединяем с полюсом, получая вектор āС. В серединах отрезков оа и са находим положения точек s1 и s2 , соединяя которые с полюсом, находим векторы ускорений āS1 и āS2 . Вектор ускорения āS3 совпадает с вектором āВ. Замеряя длины векторов неизвестных ускорений, находим их численные значения:
|
|
аB
=
𝜋b
∙
μ
А
= 75 ∙
0,163 = 12,2
аС
=
𝜋с
∙
μ
А
= 99 ∙
0,163 = 16,1
aS1
=
𝜋
s1
∙
μ
А
= 75 ∙
0,163 = 12,2
aS2
=
𝜋
s2
∙
μ
А
= 82 ∙
0,163 = 13,4
aS3
=
𝜋
s3
∙
μ
А
= 75 ∙
0,163 = 12,2
Определяем угловое ускорение:
𝜀2
=
Переносим
вектор
2.4 Аналитическое исследование положения механизма №2
Для проверки точности результатов построения планов скоростей и ускорений найдем линейные и угловые скорости и ускорения аналитическим методом. Представим звенья механизма в виде векторов ( рис.2.2 ), а углы их наклона укажем от положительного направления оси Х против хода часовой стрелки. Определим угол φ2 следующим образом. Из треугольника АВЕ находим угол α
α
=
arcsin
AD = OA ∙ sinφ1 = lОА ∙ sinφ1 Т.к. DE = e, то получим:
α
=
arcsin
Следовательно, φ2 = 360° – 5,4° = 354,6° Угловую скорость ω2 шатуна определим по формуле:
ω2
= – ω1
В этой формуле скорость ω1 подставляется со своим знаком. Знак минус указывает, что скорость ω2 направлена по часовой стрелке. |
|
Угловое ускорение 𝜀2 шатуна находим по формуле: 𝜀2
=
Скорость ползуна определится следующим образом:
VB
=
ω1
Знак минус говорит о том, что скорость направлена в сторону, обратную направлению оси Х. Ускорение ползуна вычисляем по формуле:
аВ
= -
= -12,28
Отрицательное значение указывает на то, что оно направлено влево. Сравнение результатов, полученных различными способами, говорит о том, что построения выполнены с высокой точностью.
2.5 Построение плана скоростей положения механизма №7 Отдельно вычерчиваем положение механизма №2 ( рис.2.5) Определяем скорость точки А.
VA
= ω1∙
lОА
= 12 ∙
0,17 = 2,04
Находим масштабный коэффициент скоростей, для чего полученную величину делим на длину вектора этой скорости, выбранную равной ра = 150 мм.
μV
=
Из произвольной
точки р
(полюса скоростей) проводим вектор
Здесь точка В′ принадлежит стойке Х.
Так как скорости
точек О
и В′
равны
нулю, то точки о
и b′
помещаем в полюсе. Уравнения решаются
так. Из точки а
проводим
линию, перпендикулярную шатуну АВ,
а из полюса- прямую, параллельную
стойке Х.
На пересечении ставим стрелки, получая
векторы скоростей
|
|
Откладываем
эту величину на продолжении линии аb.
Полученную точку соединяем с полюсом,
получая вектор скорости
VB
= pb
∙
μ
V
= 23,3 ∙
0,0136 = 0,3
VВА
= ba
∙
μ
V
= 139,8 ∙
0,0136 = 1,9
VC
=
pc
∙
μ
V
= 65 ∙
0,0136 = 0,9
Находим угловую скорость ω2 шатуна:
ω2
=
Направление
этой скорости можно найти, поместив
вектор
Угловая скорость ω3 ползуна равна нулю.
2.6 Построение плана ускорений положения механизма №7 Ускорение точки А в общем случае складывается из двух составляющих:
āА
=
Следовательно,
аА
=
Масштабный коэффициент ускорений можно найти путем деления этой величины на длину πа вектора āА на чертеже, равную 150 мм.
μА
=
Ускорение точки А направлено параллельно кривошипу ОА от точки А к центру О. Из произвольной точки π ( полюса ускорений ) ( рис. 2.7) проводим вектор āА длиной 150 мм . Ускорение точки В находим графоаналитически, решая систему векторных уравнений:
āВ
= āА
+
|
|
Ускорения ā0 и āВ′ равны нулю, поэтому точки 0 и b′ помещаем в полюсе.
Определяем
ускорение
Это ускорение направлено параллельно шатуну ВА от точки В к точке А. Длина вектора этого ускорения:
ат
=
В конце вектора
Точку с соединяем с полюсом, получая вектор āС. В серединах отрезков оа и са находим положения точек s1 и s2 , соединяя которые с полюсом, находим векторы ускорений āS1 и āS2 . Вектор ускорения āS3 совпадает с вектором āВ. Замеряя длины векторов неизвестных ускорений, находим их численные значения:
аB
=
𝜋b
∙
μ
А
= 110,5 ∙
0,163 = 18
аС
=
𝜋с
∙
μ
А
= 107,7 ∙
0,163 = 17,5
aS1
=
𝜋
s1
∙
μ
А
= 75 ∙
0,163 = 12,2
aS2
=
𝜋
s2
∙
μ
А
= 117 ∙
0,163 = 19
aS3
=
𝜋
s3
∙
μ
А
= 110,5 ∙
0,163 = 18
Определяем угловое ускорение:
𝜀2
=
Переносим
вектор
|
|
2.7 Аналитическое исследование положения механизма №7
Для проверки точности результатов построения планов скоростей и ускорений найдем линейные и угловые скорости и ускорения аналитическим методом. Представим звенья механизма в виде векторов ( рис.2.5 ), а углы их наклона укажем от положительного направления оси Х против хода часовой стрелки. Определим угол φ2 следующим образом. Из треугольника АВЕ находим угол α
α
=
arcsin
AD = OA ∙ sin(φ1 – 180° ) = lОА ∙ sin(210° – 180°) = lОА ∙ sin30° Т.к. DE = e, то получим:
α
=
arcsin
Следовательно, φ2 = α = 21,7° Угловую скорость ω2 шатуна определим по формуле:
ω2
= –
ω1
В этой формуле скорость ω1 подставляется со своим знаком. Знак плюс указывает, что скорость ω2 направлена против часовой стрелки. Угловое ускорение 𝜀2 шатуна находим по формуле: 𝜀2
= Скорость ползуна определится следующим образом:
VB
=
ω1
Знак плюс говорит о том, что скорость направлена по направлению оси Х. Ускорение ползуна вычисляем по формуле:
аВ
= –
= 18,3
Положительное значение указывает на то, что оно направлено вправо. Сравнение результатов, полученных различными способами, говорит о том, что построения выполнены с высокой точностью.
|
|
Изображаем
механизм в положении №2 с обозначением
масштабного коэффициента
μl
=
0,00333
m1 = q ∙ l1 = 10 ∙ 0,17 = 1,7 кг m2 = q ∙ l2 = 10 ∙ 0,75 = 7,5 кг m3 = m2 = 7,5 кг Следовательно, Q1 = m1 ∙ g = 1,7 ∙ 9,8 = 16,7 H Q2 = m2∙ g = 7,5 ∙ 9,8 = 73,5 H Q3 = m3 ∙ g = 7,5 ∙ 9,8 = 73,5 H Силы тяжести прикладываются в центрах масс S1, S2, S3 и направлены вертикально вниз.
F1
=
m1
∙
F2
=
m2
∙
F3
= m3
∙
Эти силы
прикладываются в центрах масс и
направлены они в стороны, обратные
ускорениям
Is – моменты инерции звеньев относительно центральных осей
М1
=
М2
=
М3
=
Моменты инерции
звеньев определяем по формуле
Is
=
Следовательно,
М2
=
Моменты сил инерции направлены в стороны, обратные угловым ускорениям.
5. Уравновешивающая
сила
|
|
Изображаем
отдельно структурную группу, состоящую
из шатуна 2 и ползуна 3 ( рис. 3.2 ). Реакцию
Уравнение равновесия будет иметь вид:
R03
=
R03
=
Используя
графическое условие равновесия группы
Вычисляем длины векторов сил:
|
|
Сначала строим
силы одного звена, а затем силы
действующие на другое звено. Начало
первой силы (
R12
=
Вектор
Чтобы получить
реакцию в шарнире В,
нужно рассмотреть равновесие второго
звена. Для этого начало силы
R32
=
Изображаем
отдельно кривошип 1 со всеми силами (
рис. 3.4 ), причем реакцию
Рассматривая равновесие кривошипа, записываем уравнение моментов относительно точки О .
Откуда
Ру
=
Используя
графическое условие равновесия
кривошипа
Находим длины векторов:
|
|
Соединяем
начало первой силы
R01
=
Вектор
Для проверки
точности расчетов и построений найдем
уравновешивающую силу по методу
Жуковского. Момент силы инерции второго
звена М2
заменяем
парой сил
Найдем величины этих сил:
Переносим с первого листа курсовой работы план скоростей, на который помещаем все внешние силы ( рис. 3.6 ), проложив их в соответствующие точки и повернув на 90° по часовой стрелке. Из полюса скоростей р проводим к силам перпендикуляры, которые являются плечами сил. Замеряем длины перпендикуляров и записывает уравнение моментов относительна полюса р .
Ру
=
Pу
=
= 107,16 H Сравнение результатов, полученных двумя способами, говорит о том, что погрешность вычислений и построений незначительна. |
|
4.1 Построение графика перемещений толкателя Изображаем график скорости толкателя (рис. 4.1 ) таким образом, чтобы горизонтальная ось N , обозначающая номера положений механизма, имела длину L = 240 мм , а максимальная ордината была равной h1 = 60 мм. Для правильного построения графика перемещений необходимо, чтобы суммарная площадь фигур, расположенных над осью N, была равна площади фигур, расположенных под осью N . Находим площади фигур и приравниваем их:
F
=
Для графика перемещений ( рис. 4.2 ) выбираем максимальную ординату S′ = = 120 мм. Находим площадь трапеции:
F
=
Тогда масштабный коэффициент площади будет равен:
μF
=
Разбиваем график на 12 интервалов и определяем площади фигур для каждого интервала, замеряя высоты и основания трапеций: F1 = 0, F2 = 300 мм2 , F3 = 900 мм2 , F4 = 1200 мм2 , F5 = 1200 мм2 , F6 = 600 мм2 , F7 = – 150 мм2 , F8 = – 450 мм2 , F9 = – 750 мм2 , F10 = – 1050 мм2 , F11 = – 1200 мм2 , F12 = – 600 мм2 ( Площади под осью N отрицательны ). Находим ординаты на графике перемещений:
|
|
Полученные ординаты откладываем от оси N и через найденные точки проводим плавную кривую, являющуюся графиком перемещений толкателя. Определяем масштабные коэффициенты μS
μS
=
Для нахождения коэффициента μV воспользуемся формулой:
μV
=
Здесь μl - масштабный коэффициент времени, который определяется из формулы:
μl
=
Величина
h
(рис. 4.2 ) находится следующим образом.
На графике перемещений в любой точке
m
проводим касательную τ.
Точку m
сносим на ось
μV
=
Строим профиль кулачка. Выбираем масштабный коэффициент кулачкового механизма:
|
|
μl
=
0,5
Находим размеры на чертеже:
Из произвольной
точки О
( рис. 4.3 ) проводим окружность радиуса
R′=
=
60 + 30 = 90
ведем в направлении, обратном направлению вращения кулачка, т.е. по часовой стрелке. На продолжении луча ОА1 откладываем расстояние:
А1В1
=
А3В3
= 34,3
А7В7
= 115,7
Точки В0,
В1,…
В11
соединяем плавной кривой, которая
представляет собой центровой (
теоретический ) профиль кулачка. На
теоретическом профиле выбираем 12
точек, из которых проводим окружности
радиусом
Для оценки
точности построений найдем величину
скорости толкателя в одном из положений,
в положении 3. Для этого замеряем длину
ординаты ( рис. 4.1 ) в положении 3, которая
равна
Построим план
скоростей для того же положения,
используя векторное уравнение:
Находим скорость VB3 VB3 = ω0 ∙ ρ3 , где ρ3 – действительная величина радиуса кулачка в положении 3.
Значение ρ3
находится
путем замера расстояния ОВ3
=
ρ3
=
Следовательно,
VB3
= 100 ∙
0,06215 = 6,215
|
|
Выбираем
масштабный коэффициент
Из полюса р
проводим вектор
VB′3
=
|
|
|
|
|
|
|
 - масса одного метра длинны звена
- масса одного метра длинны звена


 =
=
 =
0,00333
=
0,00333

 =
=
 =
150
=
150
 ,
l′ВС
=
,
l′ВС
=
 =
=
 =
75
=
75
 ,
,
 =
=
 =
30
=
30

 .
. =
=
 =
0,0136
=
0,0136

 A
(рис.
2.3) длиной 150
мм ,
который перпендикулярен кривошипу
ОА
и направлен в сторону его вращения.
Скорость точки В
находим
графически, используя векторные
уравнения:
A
(рис.
2.3) длиной 150
мм ,
который перпендикулярен кривошипу
ОА
и направлен в сторону его вращения.
Скорость точки В
находим
графически, используя векторные
уравнения: B
=
B
=
 A
+
A
+
 BA
,
BA
,
 B
=
B
=
 B′
+
B′
+
 BB′
BB′
 B
и
B
и
 BA
. Для
нахождения положения точки с
используем
отношение:
BA
. Для
нахождения положения точки с
используем
отношение: =
=
 , bc
=
, bc
=
 =
=
 = 37,6 мм
= 37,6 мм C
.
Численные значения скоростей получаем
путем замер каждого вектора и умножения
полученной величины на
μV.
C
.
Численные значения скоростей получаем
путем замер каждого вектора и умножения
полученной величины на
μV.


 =
=
 = 2
= 2

 BA
в точку
В
и посмотрев, куда повернется шатун
АВ
относительно точки В.
В данном случае – по часовой стрелке.
Циркулем обозначим дуговую стрелку
скорости
ω2,
ставя ножку циркуля в точку А.
BA
в точку
В
и посмотрев, куда повернется шатун
АВ
относительно точки В.
В данном случае – по часовой стрелке.
Циркулем обозначим дуговую стрелку
скорости
ω2,
ставя ножку циркуля в точку А.
 +
+

 =
=
 ∙
lОА
= 122 ∙
0,17 = 24,5
∙
lОА
= 122 ∙
0,17 = 24,5
 ;
; = ε1
∙
lОА
= 0, т.к.
ε1
=
= ε1
∙
lОА
= 0, т.к.
ε1
=
 = 0
= 0 = 24,5
= 24,5

 =
=
 =
0,163
=
0,163

 +
+
 , āВ
= āВ′
+
, āВ
= āВ′
+

 :
: =
=
 ∙
lВА
= 22 ∙
0,5 = 2
∙
lВА
= 22 ∙
0,5 = 2

 =
=
 =
12,3
мм
=
12,3
мм проводим прямую, перпендикулярную
шатуну АВ.
Из полюса π
направляем
луч, параллельный стойке Х.
На пересечении ставим стрелки, получая
векторы
проводим прямую, перпендикулярную
шатуну АВ.
Из полюса π
направляем
луч, параллельный стойке Х.
На пересечении ставим стрелки, получая
векторы
 и āВ
. Точка
а
и b
соединяем и на продолжении от точки
b
откладываем отрезок bc,
получаемый из соотношения:
и āВ
. Точка
а
и b
соединяем и на продолжении от точки
b
откладываем отрезок bc,
получаемый из соотношения:
 =
=
 , bc
=
, bc
=
 =
=
 = 65 мм
= 65 мм ,
, ,
, =
bт
∙
μ
А
= 129 ∙
0,163 = 21
=
bт
∙
μ
А
= 129 ∙
0,163 = 21
 ,
, ,
, ,
,
 =
=
 = 42
= 42

 в точку
В механизма
и находим, что угловое ускорение
направлено против часовой стрелки.
Угловое ускорение
𝜀3
ползуна
равно нулю.
в точку
В механизма
и находим, что угловое ускорение
направлено против часовой стрелки.
Угловое ускорение
𝜀3
ползуна
равно нулю. .
Но
АЕ
= AD -
DE. Величину
AD
найдем из треугольника OAD:
.
Но
АЕ
= AD -
DE. Величину
AD
найдем из треугольника OAD:
 =
arcsin
=
arcsin
 =
5,4°
=
5,4° = –
12
= –
12
 = –
2,04
= –
2,04

 =
=
 =
42,2
=
42,2

 =
12
=
12
 =
–
1,87
=
–
1,87

 = -
= -
 =
=
 .
. =
=
 =
0,0136
=
0,0136

 A
(рис.
2.6) длиной 150
мм ,
который перпендикулярен кривошипу
ОА
и направлен в сторону его вращения.
Скорость точки В
находим
графически, используя векторные
уравнения:
A
(рис.
2.6) длиной 150
мм ,
который перпендикулярен кривошипу
ОА
и направлен в сторону его вращения.
Скорость точки В
находим
графически, используя векторные
уравнения: B
=
B
=
 A
+
A
+
 BA
,
BA
,
 B
=
B
=
 B′
+
B′
+
 BB′
BB′
 B
и
B
и
 BA
. Для
нахождения положения точки с
используем
отношение:
BA
. Для
нахождения положения точки с
используем
отношение: =
=
 , bc
=
, bc
=
 =
=
 = 70 мм
= 70 мм C
.
Численные значения скоростей получаем
путем замер каждого вектора и умножения
полученной величины на
μV.
C
.
Численные значения скоростей получаем
путем замер каждого вектора и умножения
полученной величины на
μV.


 =
=
 = 3,8
= 3,8

 BA
в точку
В
и посмотрев, куда повернется шатун
АВ
относительно точки В.
В данном случае – против часовой
стрелки. Циркулем обозначим дуговую
стрелку скорости
ω2,
ставя ножку циркуля в точку А.
BA
в точку
В
и посмотрев, куда повернется шатун
АВ
относительно точки В.
В данном случае – против часовой
стрелки. Циркулем обозначим дуговую
стрелку скорости
ω2,
ставя ножку циркуля в точку А.
 +
+

 =
=
 ∙
lОА
= 122 ∙
0,17 = 24,5
∙
lОА
= 122 ∙
0,17 = 24,5
 ;
; = ε1
∙
lОА
= 0, т.к.
ε1
=
= ε1
∙
lОА
= 0, т.к.
ε1
=
 = 0
= 0 = 24,5
= 24,5

 =
=
 =
0,163
=
0,163

 +
+
 , āВ
= āВ′
+
, āВ
= āВ′
+

 :
: =
=
 ∙
lВА
= 3,82 ∙
0,5 = 7,2
∙
lВА
= 3,82 ∙
0,5 = 7,2

 =
=
 =
44,2
мм
=
44,2
мм проводим прямую, перпендикулярную
шатуну АВ.
Из полюса π
направляем
луч, параллельный стойке Х.
На пересечении ставим стрелки, получая
векторы
проводим прямую, перпендикулярную
шатуну АВ.
Из полюса π
направляем
луч, параллельный стойке Х.
На пересечении ставим стрелки, получая
векторы
 и āВ
. Точка
а
и b
соединяем и на продолжении от точки
b
откладываем отрезок bc,
получаемый из соотношения:
и āВ
. Точка
а
и b
соединяем и на продолжении от точки
b
откладываем отрезок bc,
получаемый из соотношения:
 =
=
 , bc
=
, bc
=
 =
=
 = 38,7 мм
= 38,7 мм ,
, ,
, =
bт
∙
μ
А
= 62,6 ∙
0,163 = 10,2
=
bт
∙
μ
А
= 62,6 ∙
0,163 = 10,2
 ,
, ,
, ,
,
 =
=
 = 20,4
= 20,4

 в точку
В механизма
и находим, что угловое ускорение
направлено по часовой стрелке. Угловое
ускорение
𝜀3
ползуна
равно нулю.
в точку
В механизма
и находим, что угловое ускорение
направлено по часовой стрелке. Угловое
ускорение
𝜀3
ползуна
равно нулю. .
Но
АЕ
= AD +
DE. Величину
AD
найдем из треугольника OAD:
.
Но
АЕ
= AD +
DE. Величину
AD
найдем из треугольника OAD:
 =
arcsin
=
arcsin
 =
21,7°
=
21,7° = –
12
= –
12
 = 3,8
= 3,8

 =
=
 =
– 20,6
=
– 20,6

 =
12
=
12
 =
0,3
=
0,3

 = –
= –
 =
=
 (рис.
3.1). На
механизм
действуют следующие силы:
(рис.
3.1). На
механизм
действуют следующие силы: , указываемая в задании. Она проложена
в точке В
ползуна
3 и направлена горизонтально.
, указываемая в задании. Она проложена
в точке В
ползуна
3 и направлена горизонтально.
 ,
определяемые через массы звеньев,
которые можно условно найти по формуле
m
= q
∙
l,
где q
- единицы
длины звена, l
- длина
звена:
,
определяемые через массы звеньев,
которые можно условно найти по формуле
m
= q
∙
l,
где q
- единицы
длины звена, l
- длина
звена: ,
определяемые по формуле F
= m
∙
as
,
определяемые по формуле F
= m
∙
as =
1,7 ∙ 12,2 =
24,7 H
=
1,7 ∙ 12,2 =
24,7 H =
7,5 ∙ 13,4 =
100,5 H
=
7,5 ∙ 13,4 =
100,5 H =
7,5 ∙ 12,2 =
91,5 H
=
7,5 ∙ 12,2 =
91,5 H
 ∙
ε1
= 0, т.к. ε1
= 0
∙
ε1
= 0, т.к. ε1
= 0 ∙
ε2
∙
ε2 ∙
ε3
= 0, т.к.
ε3
= 0
∙
ε3
= 0, т.к.
ε3
= 0
 =
=
 =
=
 = 0,35 кгм2
= 0,35 кгм2 ∙
ε2
= 0,35 ∙ 42,2 = 14,77 Нм
∙
ε2
= 0,35 ∙ 42,2 = 14,77 Нм у
,
прикладываемая в точке А кривошипа 1
и на - правленная перпендикулярно
ему. В нашем случае она направлена
вверх.
у
,
прикладываемая в точке А кривошипа 1
и на - правленная перпендикулярно
ему. В нашем случае она направлена
вверх. 12
направляем
произвольно, а реакцию
12
направляем
произвольно, а реакцию
 03
– вертикально. Пусть она направлена
вверх. Рассматриваем равновесие группы
и записываем уравнение моментов
относительно точки А.
Для этого сначала из точки А
проводим перпендикуляры ко всем силам,
замеряем их длины в миллиметрах и
умножаем на μl
, получая
их величины:
03
– вертикально. Пусть она направлена
вверх. Рассматриваем равновесие группы
и записываем уравнение моментов
относительно точки А.
Для этого сначала из точки А
проводим перпендикуляры ко всем силам,
замеряем их длины в миллиметрах и
умножаем на μl
, получая
их величины:
 =
=
 ∙
μl
= 112 ∙
0, 00333 = 0,37 м
∙
μl
= 112 ∙
0, 00333 = 0,37 м =
=
 ∙
μl
= 54,2 ∙
0, 00333 = 0,18 м
∙
μl
= 54,2 ∙
0, 00333 = 0,18 м =
=
 ∙
μl
= 149,3 ∙
0, 00333 = 0,5 м
∙
μl
= 149,3 ∙
0, 00333 = 0,5 м =
=
 ∙
μl
= 14,2 ∙
0, 00333 = 0,05 м
∙
μl
= 14,2 ∙
0, 00333 = 0,05 м =
=
 ∙
μl
= 149,3 ∙
0, 00333 = 0,37 м
∙
μl
= 149,3 ∙
0, 00333 = 0,37 м =
=
 ∙
μl
= 14,2 ∙
0, 00333 = 0,05 м
∙
μl
= 14,2 ∙
0, 00333 = 0,05 м = –
Q2
∙
= –
Q2
∙
 +
F2
∙
+
F2
∙
 – Q3
∙
– Q3
∙
 +
F3
∙
+
F3
∙
 + R03
∙
+ R03
∙
 + P
∙
+ P
∙
 – M2
= 0
– M2
= 0
 = 107,16 H
= 107,16 H =
0, составляем силовой многоугольник
( рис. 3.3 ) в масштабе
μF
=
1
=
0, составляем силовой многоугольник
( рис. 3.3 ) в масштабе
μF
=
1
 .
. =
=
 =
=
 = 73,5
мм
= 73,5
мм =
=
 =
=
 = 73,5
мм
= 73,5
мм =
=
 =
=
 = 73,5
мм
= 73,5
мм =
=
 =
=
 = 91,5
мм
= 91,5
мм =
=
 =
=
 = 49,4
мм
= 49,4
мм =
=
 =
=
 = 107,16
мм
= 107,16
мм 2
) обозначаем
точкой. Соединяем конец последней
силы (
2
) обозначаем
точкой. Соединяем конец последней
силы (
 03
) с начало
первой, получая вектор
03
) с начало
первой, получая вектор
 12
, который
направлен в начало силы
12
, который
направлен в начало силы
 2
. Замеряем длину этого вектора в
миллиметрах и умножаем на
μF
,
получая величину силы
2
. Замеряем длину этого вектора в
миллиметрах и умножаем на
μF
,
получая величину силы
 12
.
12
. ∙
μF
= 233,1
∙
1 = 233,1 H
∙
μF
= 233,1
∙
1 = 233,1 H 12
перечеркиваем
и направляем его так, как он идет в
многоугольнике.
12
перечеркиваем
и направляем его так, как он идет в
многоугольнике. 12
нужно
соединить с концом силы
12
нужно
соединить с концом силы
 2
. Получаем
вектор
2
. Получаем
вектор
 32
, который
идет в начало силы
32
, который
идет в начало силы
 12
. Замеряем
длину этого вектора и умножаем на
μF
, получая значение силы
12
. Замеряем
длину этого вектора и умножаем на
μF
, получая значение силы
 32
.
32
. ∙
μF
= 145
∙
1 = 145 H
∙
μF
= 145
∙
1 = 145 H 01
направляем
пока произвольно, а сила
01
направляем
пока произвольно, а сила
 21
направлена
в сторону, обратную силе
21
направлена
в сторону, обратную силе
 12
, т.е.
12
, т.е.
 21
= -
21
= -
 12
. Из точки
О
проводим перпендикуляры ко всем силам,
замеряем их и умножаем на μl
. Получаем длины плеч сил.
12
. Из точки
О
проводим перпендикуляры ко всем силам,
замеряем их и умножаем на μl
. Получаем длины плеч сил. =
=
 ∙
μl
= 12,7 ∙
0, 00333 = 0,04 м
∙
μl
= 12,7 ∙
0, 00333 = 0,04 м =
=
 ∙
μl
= 44,2 ∙
0, 00333 = 0,15 м
∙
μl
= 44,2 ∙
0, 00333 = 0,15 м = –
Q1
∙
= –
Q1
∙
 –
R21
∙
–
R21
∙
 + Pу
∙
lОА
= 0
+ Pу
∙
lОА
= 0 =
=
 = 209,6 H
= 209,6 H =
0, составляем силовой многоугольник
( рис. 3.5 ) в масштабе
μF
=
2
=
0, составляем силовой многоугольник
( рис. 3.5 ) в масштабе
μF
=
2
 .
. =
=
 =
=
 = 8,35
мм
= 8,35
мм =
=
 =
=
 = 12,35
мм
= 12,35
мм =
=
 =
=
 = 116,5
мм
= 116,5
мм =
=
 =
=
 = 104,8
мм
= 104,8
мм 1
и конец
последней
1
и конец
последней
 у
, получаем
вектор
у
, получаем
вектор
 01,
который направлен в начало силы
01,
который направлен в начало силы
 1
. Находим
величину этой силы:
1
. Находим
величину этой силы: ∙
μF
= 68,7
∙
2 = 137,4 H
∙
μF
= 68,7
∙
2 = 137,4 H 01
перечеркиваем
и направляем так, как он идет в
многоугольнике.
01
перечеркиваем
и направляем так, как он идет в
многоугольнике. и
и
 ( рис. 3.1 ), действующих в точках А
и С и
направленных перпендикулярно шатуну
АС.
При этом направление пары сил совпадает
с направлением момента М2
.
( рис. 3.1 ), действующих в точках А
и С и
направленных перпендикулярно шатуну
АС.
При этом направление пары сил совпадает
с направлением момента М2
. =
=
 =
=
 =
=
 = 19,7 H
= 19,7 H =
Q1∙
=
Q1∙
 +
F2
∙
+
F2
∙
 + Q2
∙
+ Q2
∙
 +
F3
∙
pb
+ P
∙
pb
–
+
F3
∙
pb
+ P
∙
pb
–
 ∙
∙
 –
Pу
∙
pа
–
–
Pу
∙
pа
–
 ∙
∙
 = 0
= 0

 =
= (
(
 +
+
 )h1
=
)h1
=
 (
(
 +
+
 )h2
)h2 (
(
 +
+
 )h1
=
)h1
=
 (
(
 +
+
 )h2
=
)h2
=
 ( 140 ) 60 = 4200
мм2
( 140 ) 60 = 4200
мм2
 =
=
 =
35
=
35

 =
=
 = 0
= 0 =
=
 =
=
 = 8,6 мм
= 8,6 мм =
=
 =
=
 = 34,3 мм
= 34,3 мм =
=
 =
=
 = 68,6 мм
= 68,6 мм =
=
 =
=
 = 102,8 мм
= 102,8 мм =
=
 =
=
 = 120 мм
= 120 мм =
=
 =
=
 = 115,7 мм
= 115,7 мм =
=
 =
=
 = 102,8 мм
= 102,8 мм =
=
 =
=
 = 81,4 мм
= 81,4 мм =
=
 =
=
 = 51,4 мм
= 51,4 мм =
=
 =
=
 = 51,4 мм
= 51,4 мм =
0
=
0 =
=
 =
0,5
=
0,5
 =
0,0005
=
0,0005


 =
=
 = 0,000262
= 0,000262

 ,
получая точку n,
через которую проводим луч, параллельный
касательной. Луч пересекает ось N
в точке р.
Расстояние от точки р
до начала координат и есть величина
h
= 20,1 мм.
,
получая точку n,
через которую проводим луч, параллельный
касательной. Луч пересекает ось N
в точке р.
Расстояние от точки р
до начала координат и есть величина
h
= 20,1 мм. =
0,09
=
0,09

 =
0,0005
=
0,0005

 =
=
 =
=
 =
60
=
60
 ,
,
 =
=
 =
=
 =
30
=
30

 +
+
 =
= , которую
делим на 12 частей, причем нумерацию
точек А0,
А1,…
А11
, которую
делим на 12 частей, причем нумерацию
точек А0,
А1,…
А11 =
=
 ∙
∙
 =
0 ; А2В2
=
=
0 ; А2В2
=
 =
=
 ∙
∙
 =
8,6 ∙
=
8,6 ∙
 =
8,6
=
8,6
 ; и т.д.
; и т.д. ; А4В4
= 68,6
; А4В4
= 68,6
 ; А3В3
= 34,3
; А3В3
= 34,3
 ; А5В5
= 102,8
; А5В5
= 102,8
 ; А6В6
= 120
; А6В6
= 120
 ;
; ; А8В8
= 102,8
; А8В8
= 102,8
 ; А9В9
= 81,4
; А9В9
= 81,4
 ; А10В10
= 51,4
; А10В10
= 51,4
 ; А11В11
= 17,1
; А11В11
= 17,1

 =
30
=
30
 .
С внутренней
стороны ко всем окружностям проводим
общую кривую касательную линию, которая
служит рабочим ( действительным )
профилем кулачка. Действительный
профиль кулачка и ролик с толкателем
1 положения
обводим
толстыми линиями, а остальные построения
– тонкими .
.
С внутренней
стороны ко всем окружностям проводим
общую кривую касательную линию, которая
служит рабочим ( действительным )
профилем кулачка. Действительный
профиль кулачка и ролик с толкателем
1 положения
обводим
толстыми линиями, а остальные построения
– тонкими . =
h1
= 60
=
h1
= 60
 .
Тогда скорость
толкателя будет иметь значение:
.
Тогда скорость
толкателя будет иметь значение: =
= ∙
μV
= 60 ∙
0,09 = 5,4
∙
μV
= 60 ∙
0,09 = 5,4

 B′3
=
B′3
=
 B3
+
B3
+
 B′3B3
,
где VB3
– скорость
точки В3
,
принадлежащей кулачку, VB′3
– скорость точки
B′3B3
,
где VB3
– скорость
точки В3
,
принадлежащей кулачку, VB′3
– скорость точки
 ,
принадлежащей толкателю.
,
принадлежащей толкателю. и умножения на его μl
:
и умножения на его μl
: ∙
μl
= 124,3 ∙
0,5 = 62,15
∙
μl
= 124,3 ∙
0,5 = 62,15
 = 0,06215
= 0,06215


 для построения плана скоростей,
изображая
VB3
произвольным
отрезком pb3
= 100
для построения плана скоростей,
изображая
VB3
произвольным
отрезком pb3
= 100
 ( рис. 4.4 )
( рис. 4.4 ) =
=
 =
=
 =
0,06215
=
0,06215

 B3
, перпендикулярный
ОВ3
, в сторону
вращения кулачка. В точке
В3
теоретического
профиля проводим касательную τ,
которую
переносим в точку b3
на плане
скоростей. Из полюса
р проводим
линию, параллельную толкателю в данном
положении. На пересечении ставим
стрелки и букву
B3
, перпендикулярный
ОВ3
, в сторону
вращения кулачка. В точке
В3
теоретического
профиля проводим касательную τ,
которую
переносим в точку b3
на плане
скоростей. Из полюса
р проводим
линию, параллельную толкателю в данном
положении. На пересечении ставим
стрелки и букву
 ,
получая векторы
,
получая векторы
 B′3
и
B′3
и
 B′3B3
. Замеряем
длину вектора
B′3B3
. Замеряем
длину вектора
 B′3
, умножаем на
B′3
, умножаем на
 , получая
скорость толкателя
, получая
скорость толкателя ∙
∙
 =
48,6 ∙
0,06215 = 3
=
48,6 ∙
0,06215 = 3
