

В результате анализа процесса функционирования системы из множе- ства различных M состояний выделяется только r состояний, удовлетво- ряющих требованиям нормального функционирования системы. Исходя из этого, определяется вероятность безотказной работы системы в течение времени t ≤ τ :
r
Pc (t) = å p j (t) .
j=1
Достоинства метода статистического моделирования заключаются:
-в возможности не всегда использовать аналитические выражения, связы- вающие показатели надежности ТУ и его элементов;
-в простоте учета различных законов распределения времени до отказа и времени восстановления работоспособности ТУ;
-в возможности использовать различные способы отображения временных изменений значений показателей надежности (гистограммы, средние зна- чения, дисперсия и другие).
Внастоящее время метод статистического моделирования надежности является достаточно популярным. В комплексе с расчетными методами и
методами натуральных испытаний он представляет собой перспективный аппарат исследования особенностей поведения и безотказности сложных ТУ.
8.5. Прогнозирование надежности
Исходным материалом для определения показателей надежности яв- ляется статистические данные, накопленные за период эксплуатации ТУ. Однако надежность как комплексный эксплуатационный показатель, в со- ответствии с ГОСТ 27.002-83, представляет собой «…свойство ТУ выпол-
нять заданные функции, сохраняя свои эксплуатационные характеристики в заданных пределах в течение требуемого промежутка времени или тре- буемой наработки в определенных условиях эксплуатации». Исходя из
135

этого определения, можно сказать, что значение эксплуатационных харак- теристик, под которыми понимаются наблюдаемые параметры ТУ, явля- ются косвенными характеристиками надежности. Действительно, в соот- ветствии с ранее данным определением, «…если хотя бы один из заданных параметров ТУ, характеризующих его способность выполнять заданные функции, не соответствует требованиям, то это ТУ находится в нера-
ботоспособном состоянии». Таким образом, с помощью значений наблю- даемого параметра можно оценить надежность устройства.
Пусть наблюдения за состоянием некоторого ТУ ведутся с помощью измерений значений некоторого параметра x(t) в дискретные моменты
времени t1, t2,K, tn (для простоты рассуждений рассматривается одно-
параметрический |
случай). |
Измеренные |
значения |
параметра |
||||
x*(t ), x*(t |
2 |
),K, x*(t |
n |
) являются реализациями случайного |
процесса |
|||
1 |
|
|
|
|
|
|
||
x(t) в указанные моменты времени. Тогда для всех i = 1,n будет спра-
ведливым
x*(ti ) = x(ti ) + xi ,
где x(ti ) – истинное значение наблюдаемого параметра x(t); xi – случайная составляющая наблюдения.
Истинное значение наблюдаемого параметра формируется под влия- нием условий эксплуатации, процессов износа и старения. Поэтому, в об- щем случае, для любого значения t
x(t) = f (t),
то есть x(t) является функцией времени. Для большого количества ТУ в процессе возникновения постепенных отказов или в условиях естественно- го износа и старения эта функция является монотонной. Следовательно, в
общем случае, для любых целых i > 0 имеют место неравенства:
136
|
|
|
x(t0 ) ¹ x(t1); |
|
|
|
|
|
KKKKK |
|
|
|
|
|
x(ti−1) ¹ x(ti ); |
|
|
|
|
|
KKKKK |
|
|
|
|
|
x(tn−1) ¹ x(tn ). |
|
|
x(t) |
|
|
|
|
|
x2 |
f(x, t1 |
) |
f(x, t2 |
) |
f(x, tn ) |
|
|||||
xн |
|
|
|
|
|
|
|
|
x(t1) |
x(t2) |
x(tn) |
x1 |
|
|
|
|
|
|
|
|
|
|
t |
0 |
|
|
|
|
|
|
|
|
t1 |
t2 |
tn |
|
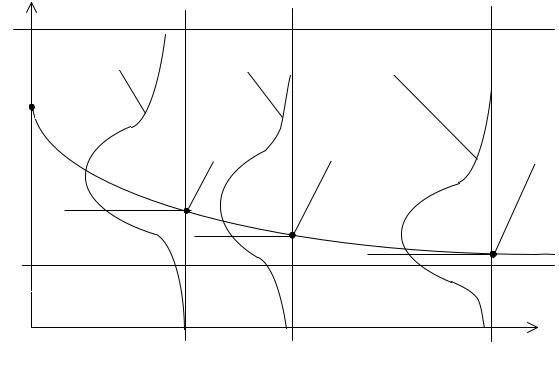
Рис. 25. Параметр наблюдения динамики надежности ТУ |
||||
Пусть функция x(t) является монотонной функцией, для которой но-
минальным значением является ее значение в нулевой момент времени:
xн = x(t0 ) .
Пусть также известны распределения случайной величины x*(t) в моменты t1, t2 ,K, tn : f (x,t1), f (x,t2 ),K, f (x,tn ) . Тогда для любого момента времени вероятность нахождения значения x*(ti ) в интервале
137
заданных не зависящих от времени ограничений ( x1, x2 ) будет опреде-
ляться выражением
x2
p(ti ) = ò f (x,ti )dx .
x1
Полученное выражение нельзя считать общепринятой вероятностью безотказной работы в момент времени ti . Однако, безусловно, вероятность
нахождения значения x*(t) в любой момент времени в интервале задан-
ных ограничений ( x1, x2 ) косвенным образом характеризует вероятность безотказной работы или надежность. Из рисунка 25 видно, что
x2 |
x2 |
x2 |
f (x,tn )dx. |
ò |
f (x,t1)dx ³ ò |
f (x,t2 )dx ³ ò |
|
x1 |
x1 |
x1 |
|
А это означает, что надежность рассматриваемого ТУ со временем падает.
Именно это свойство ТУ монотонно изменять значение наблюдаемых параметров является основой для прогнозирования надежности. Прогнози- рование надежности основывается на предсказании состояния ТУ на осно-
ве наблюдения за параметрами систем и использования их значений за прошедшие периоды эксплуатации. Для практических целей прогнозиро- вание надежности позволяет проводить заблаговременные ремонтно- профилактические работы и замену тех устройств, которые по прогнозу могут отказать во время поездки.
В настоящее время методика прогнозирования разрабатывается глав- ным образом применительно к постепенным отказам. Однако между по- степенными и внезапными отказами нет глубокой границы. Большинству скачкообразным изменениям состояния ТУ (внезапные отказы) предшест- вует накопление постепенных изменений. С расширением возможностей
контроля состояний число внезапных отказов будет сокращаться за счет возможности выявлении их предыстории и, следовательно, проведения ме-
138
роприятий по не допущению этих отказов. Сфера же применения методов прогнозирования будет расширяться.
Из опыта эксплуатации сложных систем, в том числе и информацион- ных, известно, что для большинства их элементов основную часть отказов составляют постепенные отказы, обусловленные старением и износом и выражающиеся в постепенном изменении и выходе наблюдаемого опреде- ляющего параметра за эксплуатационные ограничения. Так, например, ин- тенсивность постепенных отказов полупроводниковых приборов в 2 – 4 раза превышает интенсивность внезапных отказов. Для большинства элек- троприборов постепенные отказы составляют 40 – 60 % от всех отказов. Примерно такие же соотношения имеют место для механических конст- рукций. Поэтому в качестве основной модели отказа при выборе алгорит- мов прогнозирования надежности выбирают постепенный отказ.
Математические основы прогнозирования включают в себя методы экстраполяции, метод наименьших квадратов, приближение функций мно- гочленами, рядами, методы теории случайных функций и другие методы.
Прогнозирование в общем случае представляет собой исследователь- ский процесс, в результате которого получаются данные о будущем со-
стоянии системы на основе анализа тенденций её развития с учётом целого ряда факторов, влияющих на систему. Суть прогнозирования состоит в об- работке имеющихся данных о характеристиках прогнозируемого процесса. В ходе такой обработки могут быть получены зависимости, устанавли- вающие взаимосвязь этих характеристик. Далее с помощью найденных за-
висимостей вычисляются значения самого процесса или его характеристик на прогнозируемый период. При этом предполагается, что исследуемый процесс на участке прогнозирования имеет те же тенденции, что и на уча- стке наблюдения.
Задача прогнозирования формулируется следующим образом: по из-
вестным значениям функции x(tn−k ), k = 0,1,2,K, полученным в период
139
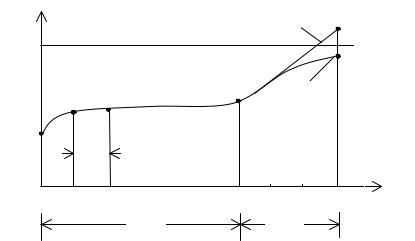
времени T1, необходимо предсказать (экстраполировать) значения этой функции x(tn+ m ), m = 1, 2,K для последующих моментов времени tn ,tn+1,K,tn+m , входящих в период T2 .
x(t) |
F(t) |
|
|
xпр |
|
|
|
|
|
|
x(t) |
x(t0) |
|
|
|
|
|
|
|
t |
|
|
|
t0 |
t1 |
t2 |
tn |
tn+1 |
t |
tn+ m |
T1 |
T2 |
Рис. 26. Иллюстрация к прогнозированию значений монотонной функции x(t)
На рисунке 26 показаны прогнозирующая функция F(t), t – ша-
гом прогноза (наблюдения). В тех случаях, когда наблюдаемый параметр x(t) представляет собой монотонную неслучайную функцию, в качестве прогнозирующей функции F(tn+m ) используют различные интерполяци-
онные полиномы. Так, в частности, по интерполяционной формуле Ла-
гранжа можно получить
|
n m(m +1)K(m + n) n |
n |
Cni |
|
|||
F(tn + m t) = (−1) |
|
|
å(−1) |
|
|
|
x(ti ), |
|
n! |
|
m + n −1 |
||||
|
|
i=0 |
|
|
|||
где n– число предыдущих дискретных наблюдений; m – число шагов прогноза. Так, для случая n =3 и m =2 получается следующий полином:
F(t3 + 2 t) = −4x(t0 ) +15x(t1) − 20x(t2 ) +10x(t3 ).
По интерполяционной формуле Ньютона прогнозирующий полином
примет вид |
|
|
|
|
m(m +1) |
|
|
|
|
F(t |
n |
+ m t) = x + m x |
+ |
2x |
n−2 |
+K , |
|||
|
|||||||||
|
n |
n−1 |
2! |
|
|
||||
|
|
|
|
|
|
|
|||
140
где
xn−1 = xn − xn−1, xn−2 = xn−1 − xn−2,K;
2xn−2 = xn−1 − xn−2, 2xn−3 = xn−2 − xn−3, K; k xn = k −1xn+1 − k −1xn.
Для n = 3 и m = 3 формула Ньютона примет вид:
F(t + 3 t) = x + 3 x + 6 |
2x +10 |
3x . |
||
3 |
3 |
2 |
1 |
0 |
Если наблюдаемая функция x(t) является случайной, то задача про-
гнозирования решается методами линейной экстраполяции случайной функции. Значение функции F(tn+m ) образуется как линейная
комбинация настоящего и прошлого значений случайных величин
x(tn−k ): |
n |
F(tn+m ) = |
åak x(tn−k ). |
|
k =0 |
На это выражение накладывается условие минимума среднего квадрата ошибки прогнозирования:
σ 2 |
= K |
|
n |
a |
K |
n n−1 |
|
[(k - l)Dt], |
|
(0) - 2 å |
[(k + m)Dt] + å åa a K |
||||||
xm |
|
x |
k = 0 |
k |
x |
k =0 l =0 |
k l x |
|
где Kx – корреляционная функция процесса x(t). Значения оптимальных коэффициентов a0, a1, K, an для прогнозирующей функции, для кото-
рых средний квадрат ошибки прогнозирования будет наименьшим, нахо- дится из системы уравнений:
2 |
|
|
n−1 |
|
|
|
дσ xm |
= −K |
|
[(k + m) t] + åa K |
|
[(k − l) t] = 0. |
|
|
|
|
||||
дak |
x |
l =0 |
l |
x |
|
|
Для оптимальных a0, a1, K, an средний квадрат ошибки прогнозирова-
ния будет минимальным:
141
σ xm2 |
n |
min = Kx (0) − å[(k + m) t]. |
|
|
k =0 |
Значение корреляционной функции находят по статистическим данным предыдущих измерений по приближенной формуле:
Kx*(ν |
|
1 |
n−ν |
|
t) |
|
å x(ti )x(ti+ν ); ν = 0,1, 2, K |
||
n −ν |
||||
|
|
i=1 |
Очевидно, что с увеличением частоты наблюдения n увеличивается точность определения K*x (ν t). При этом особое значение имеет правиль- ный выбор шага t . От неточного знания величины корреляционной
функции ошибки прогнозирования возрастают.
При прогнозировании надежности в качестве наблюдаемой функции x(t) могут быть выбраны вероятность безотказной работы p(t), вероят-
ность отказов q(t), интенсивность отказов λ(t). Прогнозирование значе-
ний самого наблюдаемого физического параметра x(t) для моментов вре-
мени tn , tn+1,K, tn+m позволит для соответствующих точек оценить ве-
роятности нахождения прогнозируемых значений параметра xпрог (tn ), xпрог (tn+1),K, xпрог (tn+m ) в пределах заданных ограничений
( x1, x2 ):
x2
p(tn ) = ò f (xпрог ,tn )dx,
x1
x2
p(tn+1) = ò f (xпрог,tn+1)dx,
x1
KKKKKKKK,
x2
p(tn+m ) = ò f (xпрог,tn+m )dx.
x1
Как известно из ранее представленного материала, эти вероятности являются косвенными оценками вероятности безотказной работы.
142
8.6. Методика системы сбора и обработки информации о надежности
Система сбора и обработки информации о надежности должна обес- печить решение следующих задач:
-определение и оценка показателей надежности;
-выявление конструктивных и технологических недостатков ТУ, сни- жающих надежность;
-установление деталей и сборочных единиц, ограничивающих надеж- ность конечных изделий;
-определение закономерностей возникновения отказа;
-оптимизация норм расхода запасных частей, выявление недостатков эксплуатации и совершенствование системы технического обслужива- ния и ремонта;
-установление влияния условий и режимов эксплуатации на надежность;
-корректировка нормируемых показателей надежности;
-определение эффективности мероприятий по поддержанию эксплуата- ционной надежности на необходимом уровне.
Информация о надежности должна быть достоверной. Так как воз-
никновение отказа происходит случайным образом, то внесение любой
субъективности в сведения об отказах приводит к неправильным выводам о фактическом уровне надежности ТУ. Поэтому нередко для формирова-
ния первичной информации о надежности прибегают к комиссионному методу оценки неисправности с составлением соответствующих докумен- тов.
Для формирования правильных выводов и решений по надежности информация об отказах должна быть полной. Данные по отказам ТУ соби- раются в межремонтный период (неплановый ремонт) и по отказам, вы-
звавшим увеличение объема ремонта или простоя на плановых ремонтах (сверхплановый ремонт). В этой информации не учитывается плановая
143
смена деталей, поэтому она не может считаться полной. Дело в том, что сам момент плановой профилактики определяется волевым способом и по- этому является случайным. Следовательно, замена какой-либо детали, предусмотренная технологией данной работы, не в полной мере подкреп- лена объективными причинами. Поэтому некоторая часть информации не учитывается, что вносит погрешности в определение величины показате- лей надежности.
Информация должна быть оперативной. Если говорить об информа-
ционных системах как одной из самых передовых категорий современной техники, то нельзя не отметить, что они являются ядром не только техно- логий сбора, накопления, обработки и передачи информации, но и систем управления сложными технологическими и другими процессами. Следова- тельно, при таких обстоятельствах особое значение приобретает информа- ция о динамике количества отказов, о качественных и количественных ха- рактеристиках отказов. Несвоевременное обнаружение отказа какого-либо, на первый взгляд, малозначительного элемента может иметь тяжелые по- следствия вплоть до линии связи, сервера или локальной сети. Информа- ция должна непрерывно и постоянно накапливаться для обоснования объ- емов работ, выполняемых при плановых профилактиках, а также для оп- тимизации всей системы обслуживания ИС.
Информация об отказах должна быть краткой, емкой и хорошо обра- батываться. Для типов ТУ разработаны специальные схемы формализации и передачи информации. Формы учета должны отвечать требованиям стандартов и содержать сведения, позволяющие выявить причины и по- следствия отказа. Основы таких сведений составляют:
-паспортные данные ТУ (ИС);
-адрес организации, где эксплуатируется ТУ;
-режимы эксплуатации;
144