

Адаптивная надежность ИС состоит в возможности реализовывать свои функции в пределах установленных границ:
|
Kад = |
Tис |
|
, |
|
|
|
||
|
|
Tис + Tвис |
||
где Tис – |
средняя наработка на отказ ИС; |
|
|
|
Tвис – |
среднее время восстановления ИС. |
|||
Как видно из последнего выражения, |
Kад есть не что иное, как коэф- |
|||
фициент готовности для ИС. |
|
|
|
|
5.4. Аналитические зависимости между показателями надежности восстанавливаемых технических устройств
В п. 5.1 был определен показатель надежности – средняя статисти-
ческая плотность вероятности. Пусть ti → 0. Тогда, при переходе от дискретного времени к непрерывному, определим плотность вероятности отказов восстанавливаемых ТУ:
lim |
ωi = ω(t) = |
1 dn0 (t) |
, |
||
N |
|
dt |
|||
ti →0 |
|
|
|
||
где dn0 (t) = dn(t) − dm(t); |
dn(t) – число отказов, возникших в ТУ за ин- |
||||
тервал времени dt , а dm(t) – количество восстановленных ТУ из числа
неисправных за этот же интервал времени dt . |
|
|
|
|
|
|
|||||||||||||||
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω(t) = |
1 |
|
|
dn(t) |
− |
1 |
|
dm(t) |
, |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
N |
dt |
N |
|
|
dt |
|
|
|
|||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω(t) = |
1 |
× |
dn(t) |
× |
N(t) |
- |
|
1 |
× |
dm(t) |
× |
n(t) |
. |
||||||||
N(t) |
|
|
n(t) |
dt |
|
||||||||||||||||
|
|
dt |
N |
|
|
|
N |
||||||||||||||
Но
76
1 |
× |
dn(t) |
= λ(t), |
|
N (t) |
dt |
|||
|
|
а величина
1 × dm(t) n(t) dt
называется интенсивностью восстановления отказавших ТУ и обозначает-
ся символом μ(t):
μ(t) = n1(t) × dmdt(t) .
Сучетом этих отношений, ω(t) примет вид
ω(t) = λ(t) p0 (t) − μ(t)q0 (t).
Известно, что для невосстанавливаемых ТУ плотность вероятности отказов аналитически выражается через вероятность безотказной работы,
как
f (t) = - dpdt(t) .
Та же зависимость характерна и для восстанавливаемых ТУ, а именно:
ω(t) = - dpdt0 (t) .
Тогда можно записать
dp0 (t) = −λ(t) p0 (t) + μ(t)q0 (t) . dt
При выражении q0 (t) через p0 (t) получается |
||
|
dp0 (t) |
+ [λ(t) + μ(t)]p0 (t) = μ(t). |
|
dt |
|
|
|
|
Решение этого дифференциального уравнения имеет вид |
||
p0 (t) = e−ò[λ (t)+μ (t)]dt[ò μ(t)eò[λ(t)+μ(t)]dtdt + C]. |
||
77

Относительно постоянной интегрирования С можно выдвинуть две версии:
-в момент начала эксплуатации ТУ исправно: p0 (0) =1;
-в момент начала эксплуатации ТУ неисправно : p0 (0) = 0.
Тогда, для случая λ = const
p0¢ (t) =
а при p0 (0) = 0
p¢¢(t) =
0
и μ = const , при p0 (0) = 1 имеем
μ |
é1+ |
λ e−(λ +μ )t ù |
, |
|
|
||||
|
ê |
μ |
ú |
|
λ + μ ë |
û |
|
||
μ |
é1- |
λ e−(λ +μ )t ù. |
||
|
||||
|
ê |
μ |
ú |
|
λ + μ ë |
û |
|
||
|
|
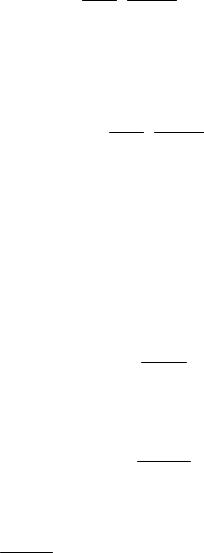
′ |
(t) |
′′ |
(t)представлены на рисунке. |
||||
График изменения p0 |
и p0 |
||||||||
1 |
p0 (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p ' |
0 (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p"0 (t) |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
||
Рис. 9. Графики изменения |
p0(t) при различных начальных условиях |
||||||||
При известных уже допущениях λ = const и μ = const , и, следователь-
но,
λ = |
|
1 |
; |
μ = |
1 |
, |
T |
|
|||||
|
|
|
Tp |
|||
получим
78

|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
|
μ |
|
= |
|
|
Tp |
|
= |
|
T |
= K Г . |
|||||
|
λ + μ |
1 |
|
+ |
|
1 |
T + Tp |
|||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
T |
|
Tp |
|
|
|
|
|
||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p' |
(t) = K |
Г |
é1+ |
λ e−(λ +μ )t ù |
, |
||||||||||
0 |
|
|
|
|
|
|
ê |
|
μ |
ú |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
ë |
|
û |
|
||
|
p" |
(t) = K |
|
|
é1- |
λ e−(λ +μ )t ù . |
||||||||||
|
|
0 |
|
|
|
|
|
|
Г ê |
|
μ |
ú |
|
|||
|
|
|
|
|
|
|
|
|
|
|
ë |
|
û |
|
||
Практически, обычно для установившегося процесса эксплуатации, счита- ют, что
p0 = K Г .
Таким образом;
pэ (t) = KГ p(τ ).
Отсюда
pэ (t) = KГ e−λt = λ μ+ μ e−λt .
Для оценки вероятности того, что в любой момент времени восста- навливаемое ТУ будет находиться в ремонте, используется функция про- стоя KП
KП = λ = Tp .
λ+ μ T + Tp
5.5.Полная вероятность выполнения заданных функций
Втом случае, когда λ и μ являются величинами одного порядка,
наиболее точные результаты эксплуатационной надежности можно полу-
чить, применяя закон полной вероятности сложного события. Эта веро-
79

ятность выполнения ТУ заданных функций равна сумме произведений ве- роятности частных событий на вероятность существующих гипотез:
pф (t,t p ) = K Г p(t) + (1− K Г )U (t p ) × p(t − t p ) .
Здесь предполагается, что существуют только два состояния: исправное рабочее и восстанавливаемое. Тогда
K Г = |
T |
|
T + Tp |
||
|
представляет собой вероятность исправного состояния ТУ;
p(t) = e− |
|
t |
|
|
|
|
|
|
|
|
|
|
||
|
|
– вероятность безотказной работы в течении времени t ; |
||||||||||||
T |
||||||||||||||
1- K Г = |
|
|
Tp |
|
|
|
– вероятность неисправного состояния ТУ; |
|||||||
T + Tp |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2t′ |
|||
|
|
|
|
|
|
|
|
|
t p |
− |
p |
|
||
|
|
|
|
|
|
|
|
|
T |
|||||
U (t p ) = 1- (1+ |
2 |
|
|
)e |
p – вероятность восстановления неисправного |
|||||||||
Tp |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
состояния ТУ за время t p ; |
||||||||||||||
p(t - t p ) = e− |
t−t p |
|
|
|
|
|
|
|||||||
T |
|
|
– вероятность безотказной работы ТУ за оставшееся по- |
|||||||||||
сле ремонта время t − t p , |
достаточное для выполнения заданной функции. |
|||||||||||||
Подставляя эти значения в исходное выражение, получим
Pф (t,t p ) = |
T |
|
T + Tp |
||
|
e |
− |
t |
|
|
Tp |
|
|
+ |
|||||
T |
|
|
||||
T + Tp |
||||||
|
|
|
|
|||
é |
æ |
|
2t |
p |
ö − |
t−t p |
ù |
− |
t−t p |
|
|
|
|
|
|||||||||
´ ê1 |
- ç1 |
+ |
|
÷e |
T úe |
|
T . |
||||
Tp |
|||||||||||
ê |
ç |
|
÷ |
ú |
|
|
|
||||
ë |
è |
|
|
|
ø |
û |
|
|
|
||
При t >> t p и T >> Tp разница между PЭ и Pф небольшая, по-
этому с достаточной степенью точности можно ограничиться формулой
− t
PЭ = K Г e T .
80