

Лекция 16. Строительные подъемники
Строительные подъемники предназначены для подъема (опускания) в грузонесущих органах строительных грузов и людей на этажи и кровлю зданий и сооружений при выполнении строительно-монтажных, отделочных и ремонтных работ. Грузонесущие органы строительных подъемников (клеть, кабина, платформа, ковш, крюк, бункер, бадья, захваты и т. д.) движутся, как правило, по вертикальным жестким направляющим.
Строительные подъемники классифицируют по назначению, способу установки, конструкции направляющих, типу грузонесущего органа и механизма подъема, способу монтажа и степени мобильности. По назначению различают грузовые подъемники, предназначенные только для транспортирования грузов, и грузопассажирские – для транспортирования грузов и людей. По способу установки подъемники делят на передвижные (самоходные и несамоходные) способные перемещаться относительно здания в процессе работы, и стационарные, которые могут быть приставными, прикрепляемыми к зданию, и свободностоящими – без крепления к зданию. Передвижные подъемники на рельсовом или пневмоколесном ходу используются сравнительно редко. По конструкции направляющих грузонесущего органа различают подъемники с подвесными (гибкими) и жесткими направляющими. Подъемники с жесткими направляющими бывают мачтовыми, скиповыми и шахтными. Тип грузонесущего органа подъемника определяется его назначением. Грузопассажирские подъемники оборудуются кабинами, грузовые – выдвижными и невыдвижными, поворотными и неповоротными платформами, выдвижными рамами, выкатными консолями, монорельсами и направляющими с подвесной клетью, а также саморазгружающимися ковшами. Механизмы подъема подъемников разделяются на канатные и бесканатные. В канатных механизмах подъема используются канатно-блочная система и лебедка, в бесканатных – зубчато-реечные или цевочно-реечные механизмы модульного типа.
По способу монтажа подъемники делятся на мобильные, перевозимые с объекта на объект в собранном виде, и немобильные, разбираемые при демонтаже на секции и перевозимые в таком виде к месту монтажа. Главным параметром подъемников является грузоподъемность – максимально допустимая масса груза, поднимаемая подъемником. К основным параметрам относятся: наибольшая высота подъема груза (расстояние по вертикали от уровня земли до нижнего уровня груза, находящегося в крайнем верхнем положении); скорость подъема и опускания груза; величина перемещения груза по горизонтали (максимальное расстояние от оси мачты подъемника до конца платформы, введенной в оконный проем, или до оси крюка, на котором подвешен груз); величина вертикального перемещения груза, введенного в здание (максимальное расстояние по вертикали между крайними верхним и нижним положениями груза); скорость подачи груза (скорость горизонтального перемещения груза); для передвижных подъемников колея (расстояние между осями рельсов или между колесами, расположенными на одной оси) и база (расстояние между осями крайних ходовых колес, расположенных на одном рельсе или одной стороне подъемника); установленная мощность; конструктивная и общая масса подъемника; шаг настенных опор (расстояние по вертикали между соседними креплениями подъемника к стене здания или сооружения); производительность и т. д.
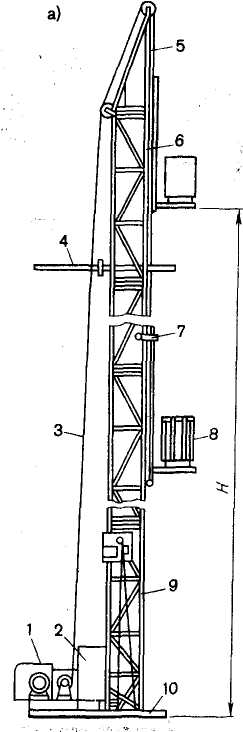

Рис. 72. Грузовой мачтовый подъемник ТП-16-3;
а-общий вид; б-схема запасовки грузового каната
Грузовые подъемники выпускаются мачтовыми, и шахтными. Шахтные подъемники применяются при возведении кирпичных труб высотой до120м. Мачтовые грузовые подъемники получили преимущественное применение в строительстве. Конструкцию этих подъемников рассмотрим на примере подъемника ТП-16-3. Подъемник ТП-16-3 (рис. 72, а) состоит из мачты, опорной рамы 10, лебедки 1, грузовой каретки 7 с выкатной платформой 8, грузового каната 3, настенных опор 4 и электрооборудования. Мачта подъемника крепится к зданию настенными опорами и состоит из рядовых 6, верхней 5 и нижней 9 секций и смонтирована на опорной раме, на которой установлены лебедка ТЛ-14А с канатоведущим шкивом и шкаф электрооборудования 2. Лебедка с помощью грузового каната обеспечивает подъем и опускание грузовой каретки с выкатной платформой, с помощью которой груз поднимается на соответствующий этаж и подается в оконный проем или на кровлю. Выкатная платформа состоит из рамы, ограждения, механизма горизонтального перемещения выкатной платформы и грузоподъемного механизма. Механизм перемещения грузовой платформы имеет ручной привод и состоит из рукоятки в сборе с водилом. Грузоподъемный механизм (рис. 73) смонтирован в нижней части выкатной платформы и предназначен для подъема на крюке грузов штучных, затаренных в ящики и бадьи, сыпучих и жидких. Механизм включает барабан 3 с ручным приводом от системы телескопических рычагов 6, запасованный на барабан канат и крюковую подвеску 2.
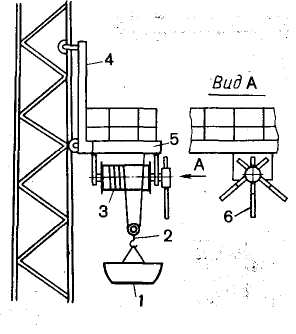
Рис. 73. Грузонесущий орган подъемников ТП-16:
1-тара; 2-крюк; 3-барабан; 4-грузовая каретка;
5-выкатная платформа; 6-телескопический рычаг
С помощью подъемного механизма груз можно опускать внутри проема на перекрытие, а также на землю в нижнем положении грузовой каретки. Грузовая каретка подвешена на грузовом канате (рис. 72, б) и опирается роликами на направляющие элементы мачты. Грузовой канат 3 огибает головной блок 11 мачты, блок 12 грузовой каретки и крепится на мачте. В случае обрыва или ослабления грузового каната торможение грузовой каретки обеспечивается эксцентриковым ловителем. Перемещение грузовой каретки вверх и вниз ограничивается предохранительным устройством, отключающим также привод лебедки при выдвижении выкатной платформы. В подъемнике ТП-16-3 предусмотрена возможность адресования груза на заданный этаж. Пусковая аппаратура подъемника расположена в электрошкафу. Для дистанционного управления приводом лебедки используется выносной кнопочный пост. С объекта на объект подъемники ТП-16-1, ТП-16-2 и ТП-16-3 перевозятся в разобранном виде с помощью автотранспортных средств.
Подъемник ТП-17, имеющий грузоподъемность 500кг, применяется при строительстве и ремонте зданий до 22 этажей. Он может эксплуатироваться в I...V ветровых районах при температуре окружающего воздуха от – 40 до + 400С. Подъемник предназначен для подъема и горизонтального перемещения в проемы зданий строительных материалов с возможностью их опускания на междуэтажные перекрытия при строительных, отделочных и ремонтных работах. С помощью подъемника можно транспортировать длинномерные грузы до 5м. Грузонесущий орган подъемника обеспечивает транспортирование грузов на выкатной консоли и в подвесной таре. Благодаря этому можно перемещать не только, штучные, сыпучие, длинномерные грузы, но и крупногабаритные изделия (оконные и дверные коробки, ванны, листовые материалы и др.).
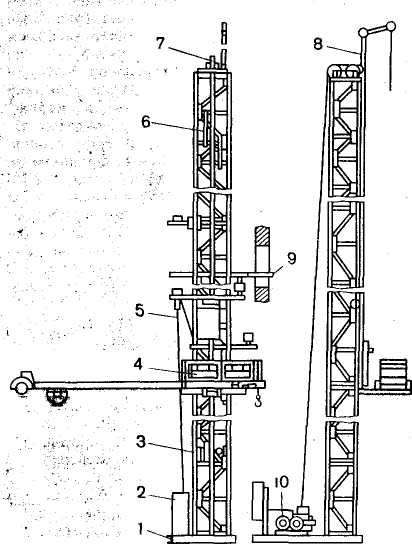
Рис. 74. Грузовой мачтовый подъемник ТП-17
Основными узлами подъемника (рис. 74) являются опорная металлическая рама 1, сборно-разборная четырехгранная мачта 3, грузовая лебедка 10, настенные опоры 9, грузовая каретка 4, приспособление 8 для монтажа и электрооборудования. Грузовая каретка на роликах перемешается по направляющим мачты с помощью грузовой лебедки ТЛ-9А.1 и грузового каната, проходящего через головные блоки 7 мачты. Опорная рама устанавливается на, бетонную плиту размером 3,5×3. м, толщиной 80мм. Грузовая каретка состоит из Г – образной рамы, на опорных и боковых роликах которой смонтирована выкатная консоль. На горизонтальной части рамы каретки установлен механизм горизонтального перемещения выкатной консоли, на выходных валах которого имеются канатоведущие шкивы, через которые запасован канат. Для ограничения крайних положений выкатной консоли и смещения консоли на 1м при управлении с поста машиниста служат конечные выключатели.
Грузовая каретка оборудована эксцентриковыми ловителями, тормозящими грузонесущий орган при обрыве или ослаблении натяжения грузового каната, конечным выключателем ограничения верхнего аварийного положения каретки на мачте. На каретке установлен шкаф управления кареткой. Нижнее положение грузовой каретки ограничивается конечным выключателем. В нижней части каретки смонтирован выдвижной палец, служащий для предохранения каретки от самопроизвольного опускания при выполнении погрузочно-разгрузочных работ.
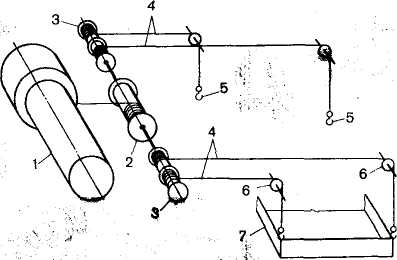
Рис. 75. Механизм вспомогательного подъема подъемника ТП-17
Для горизонтальной подачи материалов в проемы здания служит механизм вспомогательного подъема (рис. 75), состоящий из грузоподъемного механизма (электротали) 1, канат которой запасован на промежуточном барабане 2. По бокам этого барабана, на общем валу установлены два сдвоенных барабана 3, на которых запасованы канаты 4. Эти канаты пропущены через блоки 6 и закреплены в передней части консоли. Канаты заканчиваются крюками 5, к которым подвешивается бадья или другая емкость 7 для транспортировки сыпучих материалов. В передней части выкатной консоли установлена раздвижная грузовая площадка, состоящая из основного и дополнительного настилов, боковых и торцовых ограждений. Ширину грузовой площадки можно изменять в пределах 540...1000мм, что обеспечивает возможность подачи материалов в различные типы оконных коробок, а также подачи крупногабаритных и длинномерных грузов. Питание электроприводов, размещенных на грузовой каретке, осуществляется по подвесному кабелю 5 (рис. 74), который при опускании каретки укладывается на барабан кабелеукладчика 2, расположенного на опорной раме. Подъемник оборудован устройством поэтажной адресации груза, системой сигнализации и поэтажной телефонной связью с машинистом. Управление подъемником осуществляется дистанционно с помощью двух переносных кнопочных постов – наземного и расположенного на грузонесущем органе. С наземного поста машиниста управляют подъемом и опусканием грузовой каретки с ее адресованием и горизонтальным перемещением груза в проем на расстояние до 1м от оси мачты. С помощью кнопочного поста, расположенного на выкатной консоли, управляют движением подъема – опускания грузовой каретки, горизонтальным перемещением выкатной консоли с грузом на расстояние до 3м от оси мачты и опусканием груза на перекрытие. Постом управляет рабочий, находящийся в оконном проеме.
Монтаж подъемника осуществляется методом наращивания мачты секциями сверху с помощью монтажной укосины.
С объекта на объект подъемник перевозится в разобранном виде.
Грузопассажирские подъемники представляют собой приставные немобильные (разбираемые при демонтаже) машины, которые по конструкции жестких направляющих разделяются на шахтные и мачтовые. Шахтные подъемники имеют ограниченное применение и используются для строительства кирпичных и монолитных железобетонных дымовых труб. Мачтовые грузопассажирские подъемники широко применяются в строительном производстве. Составными частями каждого грузопассажирского мачтового подъемника являются решетчатая мачта прямоугольного или треугольного сечения, опорная рама, грузонесущий орган – кабина для размещения грузов и людей, противовес и механизм подъема. Мачты подъемников крепят к зданию настенными опорами. На мачтовых грузопассажирских подъемниках применяются подъемные механизмы двух типов – канатные и бесканатные (реечные).
В канатных механизмах подъема используются реверсивные барабанные лебедки и лебедки с канатоведущим шкивом. При применении барабанных лебедок кабину подвешивают на двух канатах, которые запасовываются на барабан лебедки и располагаются в винтовых канавках на его поверхности, имеющих левую и правую нарезку. В зависимости от направления вращения барабана канаты попарно навиваются на него или разматываются. При использовании лебедки с канатоведущим шкивом кабина подвешивается на трех канатах.
Бесканатный реечный механизм подъема монтируется непосредственно на грузонесущем органе и включает электродвигатель, тормоз и редуктор, на выходном валу которого закреплена шестерня, входящая в зацепление с зубчатой или цевочной рейкой, установленной по всей длине мачты. При своем вращении шестерня перемещается поступательно вдоль рейки, увлекая за собой кабину. Реечные подъемные механизмы включают один или два подъемных модуля. Широко распространенные мачтовые подъемники ПР1-172А, ПР1-172Б и ПГПМ-4272 с бесканатным механизмом подъема используются на строительстве зданий высотой соответственно 70,90 и 150м; подъемник МГП-1000 с канатным механизмом подъема на строительстве зданий высотой до 150м.

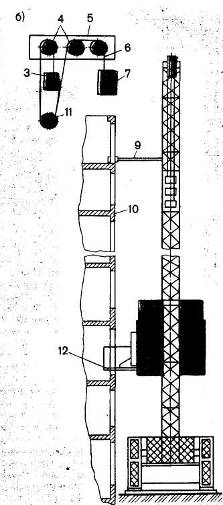
Рис. 76. Грузопассажирский мачтовый подъемник МГП-1000;
а – общий вид; б – схема запасовки грузового каната
Подъемник МГП-1000 (рис. 76, а) грузоподъемностью 1000 кг состоит из решетчатой мачты 2, установленной на опорной раме 1, кабины 7, противовеса 3, машинного отделения с механизмом подъема и ограждением 8. Через отводные блоки 4 головки 5 мачты запасованы три грузовые каната 6, на одних концах которых через балансирную подвеску подвешена кабина, а на других – противовес с тремя резервными барабанами для сматывания излишков каната при малой высоте мачты. Кабина по мачте перемещается на ходовых роликах и снабжена входной и выходной дверями и откидным трапом 12 для высадки пассажиров на этажах. Мачта крепится к зданию 10 настенными опорами 9. Механизм подъема включает канатно-блочную систему (рис. 76, б) и лебедку 11 с канатоведущим шкивом. От двухскоростного электродвигателя 6 (рис. 77) лебедки через глобоидный редуктор 4 приводятся во вращение монтажный барабан 8 и канатоведущий шкив 1, которые сидят на валу свободно и включаются с помощью водила 9 и фиксирующих болтов 2. Выходной вал редуктора соединен с валом шкива и барабана зубчатой муфтой 7. Лебедка снабжена автоматическим колодочным тормозом 5, а монтажный барабан – тормозом 3. Канатоведущий шкив с тремя кольцевыми ручьями на поверхности огибают три грузовых каната, располагаемые в ручьях. Канаты прижимаются к поверхности ручьев за счет натяжения, создаваемого весом кабины и противовеса. Тяговое усилие каждому канату сообщается за счет трения между контактирующими поверхностями каната и ручья шкива.
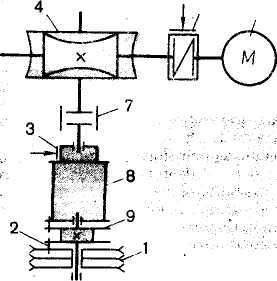
Рис. 77. Лебедка подъемника МГП-1000
Монтаж подъемника осуществляют методом наращивания сверху секции с помощью монтажного барабана лебедки, монтажного каната и самоподъемной монтажной головки с наклоняющейся стрелой и собственным механизмом перемещения головки по мачте. Подъемник можно монтировать также с помощью башенного крана, монтажного блока, каната и вспомогательной лебедки.
При наращивании мачты во время монтажа грузовые канаты, запасованные на максимальную высоту подъема кабины, постепенно сматываются с резервных барабанов.
Подъемником управляет один машинист. Безопасность работы подъемника обеспечивается ограничителем скорости, установленным на каретке, и ловителями, срабатывающими при ослаблении натяжения или обрыве подъемного каната.
Грузопассажирский подъемник ПГПМ-4272 (рис. 78) грузоподъемностью 1000 кг имеет модульно-блочную конструкцию и состоит из секционной сборно-разборной мачты 2 с зубчатой рейкой, оголовком 3 и направляющими стойками, узлов 6 для жесткого крепления мачты к зданию 12, кабины 5 с вертикально-раздвижными дверями, приводного, грузоподъемного 4 и натяжного 7 устройств, противовеса 11 с канатом 8, нижнего ограждения 1, узла безопасности и электрооборудования. Нижнее ограждение состоит из железобетонной плиты основания, сетчатого ограждения, буферов 9 и 10 кабины и противовеса. Возвратно-поступательное движение кабины обеспечивается реечным приводным устройством, состоящим из двух унифицированных моноблочных приводных модулей закрытого типа. Каждый модуль включает (рис. 79, б) электродвигатель 11 со встроенным дисковым тормозом 10 и червячный редуктор 12, на выходном валу которого закреплена ведущая шестерня 5, входящая в зацепление с рейкой 4 мачты. Модули смонтированы в кабине, роликовыми башмаками которой охватывают направляющие стойки мачты с трех сторон. Кабина снабжена центробежным фрикционно-дисковым узлом безопасности 6 (рис. 79, а) с постоянным усилием торможения. Узел безопасности растормаживается при неработающем механизме подъема вручную за 20...30 с. с помощью ручного привода. Уравновешивание кабины 7 обеспечивается противовесом 1, подвешенным на канатах 2, огибающих блоки 3 оголовка мачты.
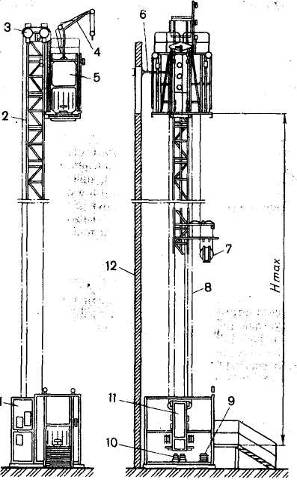
Рис. 78. Грузопассажирский мачтовый подъемник ПГПМ-4272
На крыше кабины смонтировано грузоподъемное устройство грузоподъемностью 150кг, предназначенное для монтажа и демонтажа взаимозаменяемых секций мачты. Питание электрооборудования в кабине осуществляется через силовой подвесной кабель 8 с натяжным устройством 9.
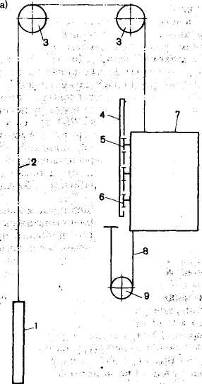
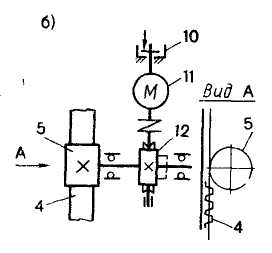
Рис. 79. Кинематическая схема подъемника ПГПМ-4272
Подъемник оборудован следующими приборами безопасности: блокировочным выключателем на люке кабины, блокировочным выключателем замков на двери нижнего ограждения и входной двери кабины, блокировочным выключателем узла безопасности, блокировочным выключателем слабины канатов противовеса, путевым выключателем точной остановки, блокировочным выключателем перепуска.
Подъемником управляет один машинист. Монтаж и демонтаж мачты осуществляются с помощью собственных механизмов подъемника.
Система управления подъемником — рычажная внутренняя (из кабины) с вызовом кабины с остановок с помощью телефонной связи.
С объекта на объект грузопассажирские подъемники перевозятся в разобранном виде с помощью автотранспортных средств.
Эксплуатационная производительность строительных подъемников (т/ч)
![]()
где Q – номинальная грузоподъемность, т; Кг – коэффициент использования подъемника по грузоподъемности (Кг = 0,6...0,8); Кв – коэффициент использования подъемника по времени (Кв = 0,5...0,9); n — число циклов в час (n = 3600/tц); tц – продолжительность одного цикла, с;
![]()
где tм — машинное время, затрачиваемое на вертикальное и горизонтальное перемещения грузонесущего органа, с; tp – время, затрачиваемое на ручные операции, включающие погрузку и разгрузку, с.
Для подъемников с жестким грузонесущим органом
![]()
Для подъемников с выдвижным грузонесущим органом
![]()
где Н и v – высота (м) и скорость (м/с) подъема и опускания груза; L и vг – длина пути (м) и скорость (м/с) перемещения груза в проем.