

Вторая задача
Схема ко второй задаче (85 168) включает в себя высшую кинематическую пару в виде кулачковых механизмов и других криволинейных звеньев.
При решении задачи требуется определить подвижность механизма; построить заменяющий механизм (т. е. заменить высшую кинематическую р4 низшими р5 с добавлением звеньев); определить класс механизма, проверив подвижность.
Необходимо обратить внимание на схемы с кулачком и роликовым толкателем (в схемах ролик как «лишнее» звено используется для улучшения качества работы механизма). Например, в схеме 89, если не включить ролик в число звеньев как самостоятельное звено, то задача не решается.
Структурная формула записывается для одного случая ведущего звена (или звеньев), заданного сплошной стрелкой.
З а д а ч а 2.
Вычерчиваем кинематическую схему механизма (рис. 1.10).
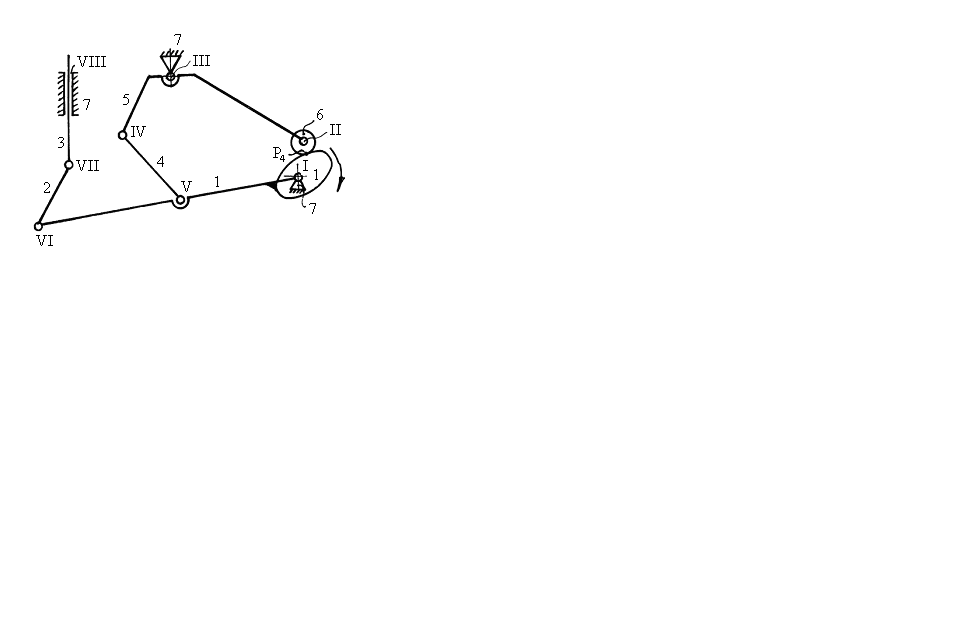
Рис. 1.10
Определяем степень подвижности механизма по формуле:



Так как степень подвижности W = 1, механизм имеет в своем составе одно ведущее звено кулачок (звено 1).
Определяем класс механизма при ведущем звене 1. Для этого заменим высшую кинематическую пару звеном, входящим только в низшие пары – во вращательные и поступательные пары пятого класса. При этом необходимо соблюдение условий: механизм, полученный после такой замены, должен иметь прежнюю степень подвижности и должно сохраняться мгновенное относительное движение всех его звеньев.
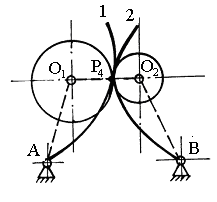
Замену высшей пары низшими необходимо выполнить следующим образом (рис. 1.11): в точке Р4 касания двух профилей (пара четвертого класса) провести нормаль к профилям. На ней найти центры кривизны О1 и О2 соприкасающихся профилей. Установить в точках О1 и О2 центры шарниров, соединив их фиктивным звеном О1О2, которое будет входить в две пары пятого класса (условие структурной эквивалентности). Механизм АО1О2В и есть заменяющий механизм, причем значения скорости и ускорения ведомого звена 2 (О2В) будут те же, что в действительном механизме.
Если один из элементов высшей кинематической пары будет прямой линией (рис. 1.12, а), центр кривизны О2 этого профиля будет бесконечно удален, то тогда и фиктивное звено будет входить в одну вращательную и одну поступательную пару (рис. 1.2, б).
Необходимо иметь в виду, что длина фиктивного звена будет различной для разных положений ведущего, т. е. для кинематического анализа придется строить целый ряд заменяющих механизмов для последовательных положений ведущего звена.
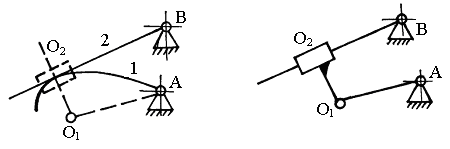
а б
Рис. 1.11 Рис. 1.12
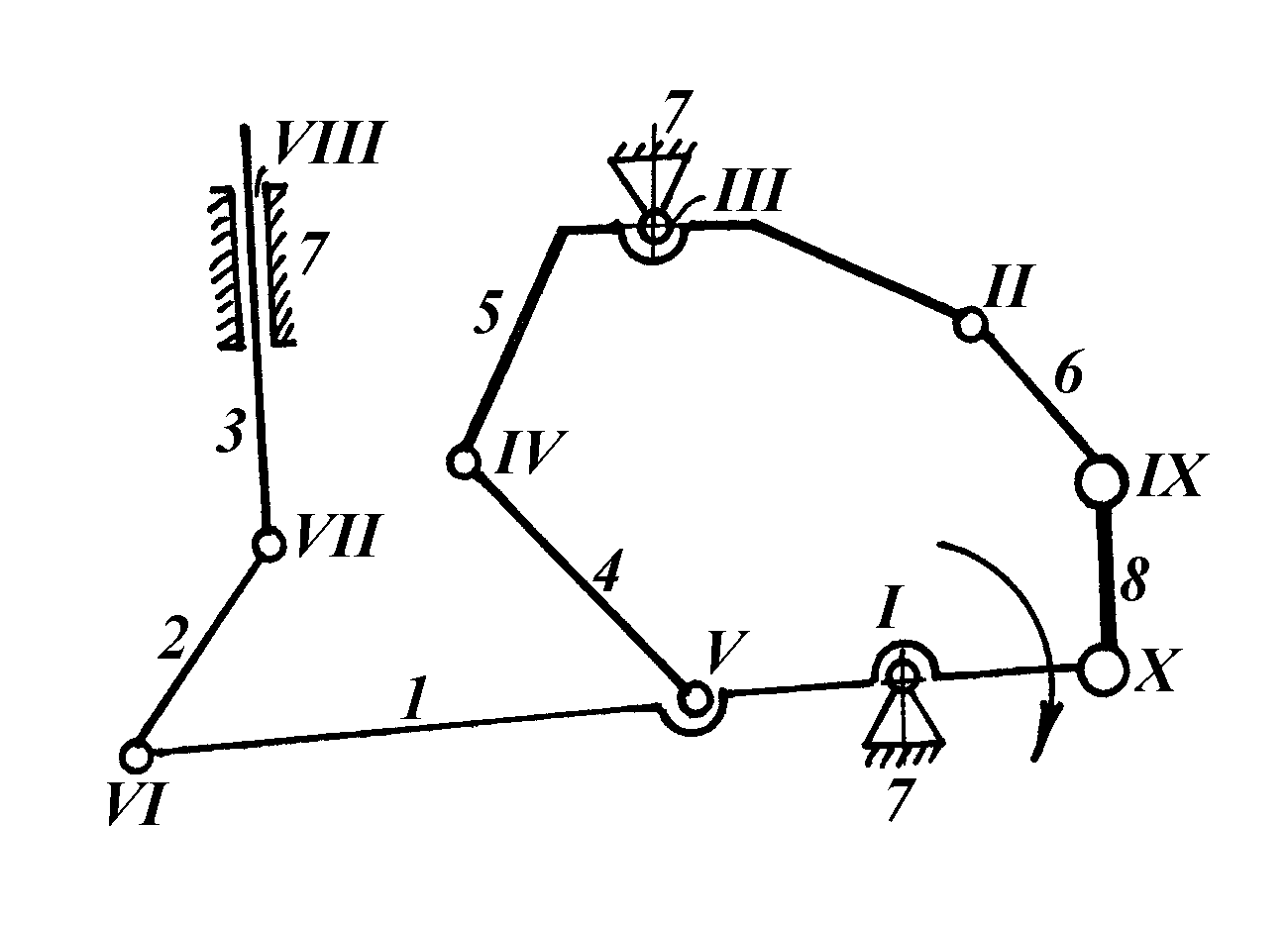
Преобразуем предложенный механизм, имеющий в своем составе пару четвертого класса р4, в механизм, имеющий только пары пятого класса р5 (рис. 1.13). Итак, после замены высшей пары р4 звеном 8 с двумя парами р5 (IX и X) проверим степень подвижности получившегося механизма:
![]()
![]()
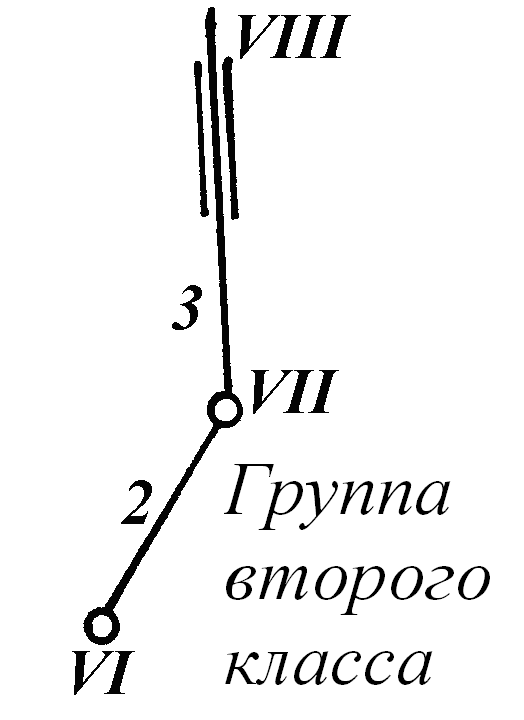
4) Определяем класс механизма при ведущем звене 1: а) отсоединяем самую удаленную от ведущего звена группу Ассура второго класса, состоящую из звеньев 3 и 2 с кинематическими парами VI, VII, VIII (рис. 1.14), и проверяем степень подвижности оставшегося механизма (она не должна измениться): |
Рис. 1.13 |
![]()
![]()
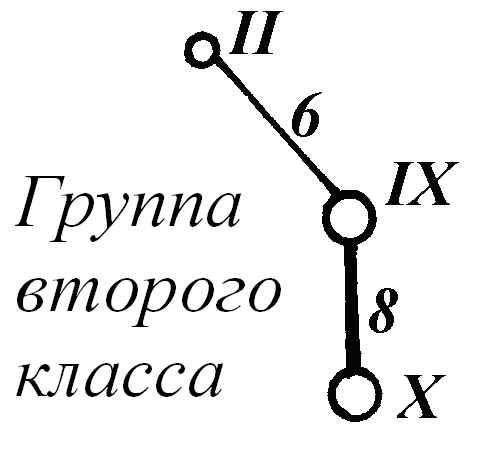
б) отсоединяем следующую группу второго класса и проверяем степень подвижности оставшегося механизма. Группа состоит из звеньев 6 и 8 с парами II, IX, X (рис. 1.15). Проверяем степень подвижности оставшегося механизма:
![]()
![]()
Рис. 1.14
Рис. 1.15
|
Степень подвижности его не изменилась, значит, отсоединение сделано верно; в) отсоединяем следующую группу второго класса, состоящую из звеньев 4 и 5 с кинематическими парами III, IV, V (рис. 1.16). Проверяем степень подвижности оставшегося механизма (рис. 1.17) ведущего звена 1 с кинематической парой I:
Отсоединение выполнено верно; г) составляем структурную формулу образования механизма в порядке присоединения групп Ассура к ведущему звену и стойке:
2; 314; 56; 8.
|
Данный механизм имеет в своем составе ведущее звено, стойку и три группы второго класса. Значит, класс механизма второй.
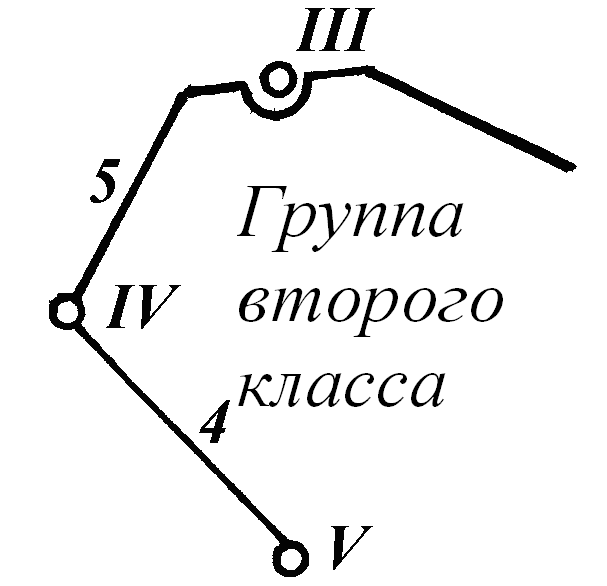
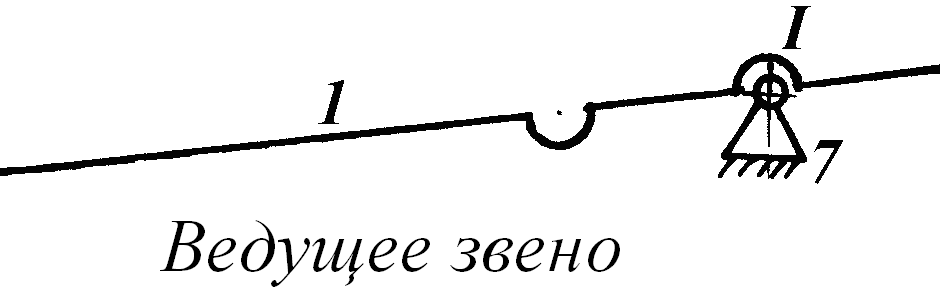
Рис. 1.16 Рис. 1.17