

7.3.7. Зовнішня характеристика.
Однією з найважливіших характеристик генератора є зовнішня характеристика, що являє собою залежність напруги U на клемах генератора від струму I при постійній швидкості обертання якоря n і незмінному опорі кола збудження.
На рис. 7.59 представлена зовнішня характеристика генератора з паралельним збудженням. Напруга на клемах генератора визначається за формулою:
U = Е – Iя
rя.
= Е – Iя
rя.
Із зростанням навантаження напруга U на клемах генератора знижується внаслідок збільшення падіння напруги в колі якоря і деякого ослаблення магнітного потоку машини при неповній компенсації реакції якоря. Крім того, при зниженні напруги струм збудження меншає (оскільки Iзб пропорційний U), що призводить до ослаблення магнітного потоку полюсів. Це в свою чергу спричиняє додаткове зменшення ЕРС Е і напруги U генератора. Щоб коливання струму збудження незначно впливали на величину ЕРС, що індукується, генератори повинні працювати з насиченою магнітною системою.
Підтримка незмінною напруги при різних навантаженнях досягається зміною ЕРС Е шляхом регулювання струму збудження (реостатом rр на схемі генератора з паралельним збудженням).
У
деяких випадках застосовують генератори
зі
змішаним
збудженням. У
цих машин, крім основної паралельної
обмотки збудження 1, є ще одна
обмотка 2 з невеликим числом витків, що
вмикається
послідовно
з навантаженням (див. р ис.
7.60).
ис.
7.60).
Обидві обмотки знаходяться на одних і тих же сердечниках головних полюсів і звичайно приєднуються так, щоб магнітні потоки, що створюються ними складалися (узгоджене включення обмоток). При збільшенні навантажувального струму одночасно зростає струм в послідовній обмотці збудження. Завдяки цьому потік збудження дещо посилюється і збільшує ЕРС, що індукується. Цим частково компенсується падіння напруги в колі якоря при збільшенні навантаження.
7.3.8. Виникнення електромагнітного обертового моменту.
У кожній машині постійного струму має місце взаємодія між струмом якоря Iя і магнітним потоком Ф (див. рис. 7.61). На кожний стержень якоря діє електромагнітна сила F = ВI l.
Напрям дії цієї сили визначається правилом лівої руки.
П ідставивши
сюди середнє значення магнітної індукції
ідставивши
сюди середнє значення магнітної індукції
![]() і величину струму в кожному із стержнів
обмотки якоря
і величину струму в кожному із стержнів
обмотки якоря
![]() ,
отримаємо:
,
отримаємо:
![]() .
.
Електромагнітний момент, що діє на якір машини при числі провідників N обмотки якоря:
![]() або М
= kФІя,
або М
= kФІя,
де
![]() – величина, постійна для даної машини.
– величина, постійна для даної машини.
7.3.9. Двигуни постійного струму.
Я к
відзначалось, машина постійного
струму є оборотною, оскільки вона може
працювати як у режимі генератора, так
і у режимі двигуна. Устрій двигуна
постійного струму такий же як і у
генератора. В ньому відбуваються ті ж
процеси, що і в генераторі.
к
відзначалось, машина постійного
струму є оборотною, оскільки вона може
працювати як у режимі генератора, так
і у режимі двигуна. Устрій двигуна
постійного струму такий же як і у
генератора. В ньому відбуваються ті ж
процеси, що і в генераторі.
На рис. 7.62 схематично представлений найпростіший електродвигун постійного струму. Нерухома частина двигуна – індуктор – містить полюси магніту N–S (1). Основний незмінний в часі магнітний потік Ф пронизує простір між полюсами і замикається через станину двигуна (див. рис. 7.45). Обертова частина електродвигуна складається з укріплених на валу циліндричного якоря (2) і колектора (3). Якір, як і у генератора, складається з осердя, набраного з листів електротехнічної сталі, і обмотки, укріпленої на сердечнику якоря. Обмотка якоря в показаному на рисунку найпростішому електродвигуні має один виток. Кінці витка з’єднані з ламелями колектора, число яких в даному випадку дорівнює двом. На колектор накладені дві нерухомі щітки 4, за допомогою яких обмотка якоря з’єднується з зовнішнім колом живлення.
До щіток колектора від джерела живлення U підводиться постійний струм. Роль колектора в цьому випадку полягає в тому, щоб у будь-який момент часу забезпечити такий розподіл струму по обмотці якоря, при якому під полюсами різної полярності розташовувалися провідники з протилежним напрямком струму. Для певного моменту часу такого розподілу струму в якорі відповідає рис. 7.62. При такому розподілі струму електромагнітні сили провідників будуть направлені в один бік, у чому можна переконатися, застосувавши правило лівої руки1. У результаті цього при інших рівних умовах двигун буде створювати найбільший обертаючий момент.
Якщо до обмотки якоря через колектор підвести постійний струм від зовнішнього джерела U, то на провідники обмотки якоря будуть діяти електромагнітні сили і виникне електромагнітний момент. Напрямок дії електромагнітних сил визначається за правилом лівої руки.ЕРС якоря двигуна визначається за формулою Eя = cnФ, такою ж як і для ЕРС якоря генератора (див. п. 7.3.4).
Обертовий момент на валу двигуна є такий же як і у генератора і дорівнює Моб = kФІя (див. п. 7.3.8).
Еквівалентна схема заміни двигуна аналогічна еквівалентній схемі генератора (рис. 7.50). Відмінність в еквівалентних схемах лише в тому, що струм у генератора направлений від утвореної у якорі ЕРС до навантаження, а у двигуна – від мережі живлення до ЕРС якоря.
Н а
рис. 7.63 показана еквівалентна схема
заміни двигуна постійного струму.
а
рис. 7.63 показана еквівалентна схема
заміни двигуна постійного струму.
На основі цієї схеми складається внутрішнє рівняння стану двигуна (за другим законом Кірхгофа):
Ея + ІяRя – Uжив = 0
або
Uжив = Ея + ІяRя.
Зазначені вирази для ЕРС двигуна Е, моменту на валу М і останнє рівняння є основними рівняннями двигуна постійного струму.

а) Паралельна б) Послідовна в) Змішана
схема з’єднання схема з’єднання схема з’єднання
Рис. 7.64.
У двигуна постійного струму, як і у генератора, є обмотка збудження. В залежності від способу з’єднання обмотки збудження відносно обмотки якоря двигуни можуть бути із паралельним (шунтові двигуни), із послідовним (серієсні двигуни) і із змішаним (компаундні двигуни) з’єднанням. Компаундні двигуни мають дві обмотки збудження. На рис. 7.64 показані схеми з’єднання обмоток.
Із наведених на рисунку схем з’єднання обмоток збудження найбільше розповсюдження отримала схема із паралельним збудженням. Вона володіє широкими регулювальними можливостями при малих енергетичних витратах на регулювання частоти обертання валу n.
Залежність n = f(Mоб) називається механічною характеристикою двигуна постійного струму.
Для
шунтового двигуна
(рис. 7.64-а) механічну
характеристику можна отримати із
основного рівняння стану двигуна Uжив
= Ея
+ ІяRя.
Підставляючи в нього вирази Eя
= cnФ і
![]() отримаємо:
отримаємо:
![]() .
.
Звідки
![]() ,
де
,
де
![]() – частота обертання валу на холостому
ході без навантаження;
– частота обертання валу на холостому
ході без навантаження;
![]() – зменшення частоти обертання, викликане
зміною навантаження на валу двигуна.
– зменшення частоти обертання, викликане
зміною навантаження на валу двигуна.
О триманий
вираз і визначає залежність n = f(Mоб)
в механічній характеристиці шунтового
двигуна. На рис. 7.65 представлено графічне
уявлення цієї залежності. При зміні
навантаження на валу двигуна від
холостого ходу до номінального частота
обертання більшості шунтових двигунів
зменшується лише на 3-8% (тим менше, чим
більше номінальна потужність двигуна).
Таким чином, механічну характеристику
шунтових двигунів слід вважати жорсткою1.
триманий
вираз і визначає залежність n = f(Mоб)
в механічній характеристиці шунтового
двигуна. На рис. 7.65 представлено графічне
уявлення цієї залежності. При зміні
навантаження на валу двигуна від
холостого ходу до номінального частота
обертання більшості шунтових двигунів
зменшується лише на 3-8% (тим менше, чим
більше номінальна потужність двигуна).
Таким чином, механічну характеристику
шунтових двигунів слід вважати жорсткою1.
Крім
жорсткості можна відзначити і інші
показники якості характеристики, зокрема
характеристика лінійна,
оскільки Моб
в аналітичному виразі піднесено до
першої степені. Характеристики стійкі,
оскільки dn/dMоб < 0,
і забезпечують саморегулювання двигуна,
тобто він автоматично пристосовується
до зміни навантаження. Збільшення
статичного моменту опору на валу двигуна
призводить до зменшення кутової швидкості
і ЕРС якоря. Струм якоря,
вираз для якого можна записати на
підставі рівняння
стану
![]() ,
зростає. Відповідно зростає електромагнітний
обертовий момент аж до нового значення
моменту опору.
,
зростає. Відповідно зростає електромагнітний
обертовий момент аж до нового значення
моменту опору.
Деформуючи механічну характеристику можна побудувати характеристики, властиві різним режимам роботи двигуна, як це буде показано далі.
Д ля
впливу на механічну характеристику
двигуна в колах живлення якоря і обмотки
збудження можуть бути встановлення
реостати (рис. 7.66). Так, реостат в колі
якоря Rдод
визначає нахил механічної характеристики
n = f(Mоб)
до осі абсцис. За відсутності в колі
якоря додаткового опору реостату Rдод
(рис. 7.64-а) характеристика буде максимально
жорсткою. В цьому випадку вона називається
природною характеристикою.
При включенні додаткового опору реостату
Rдод
кут нахилу характеристики зростає,
унаслідок чого можна отримати сімейство
реостатних характеристик,
відповідних різним значенням Rдод.
Чим більше Rдод,
тим більший кут нахилу має реостатна
характеристика, при цьому n0
залишається незмінним,
а Δn –
збільшується, тобто характеристика
стає м’якшою.
ля
впливу на механічну характеристику
двигуна в колах живлення якоря і обмотки
збудження можуть бути встановлення
реостати (рис. 7.66). Так, реостат в колі
якоря Rдод
визначає нахил механічної характеристики
n = f(Mоб)
до осі абсцис. За відсутності в колі
якоря додаткового опору реостату Rдод
(рис. 7.64-а) характеристика буде максимально
жорсткою. В цьому випадку вона називається
природною характеристикою.
При включенні додаткового опору реостату
Rдод
кут нахилу характеристики зростає,
унаслідок чого можна отримати сімейство
реостатних характеристик,
відповідних різним значенням Rдод.
Чим більше Rдод,
тим більший кут нахилу має реостатна
характеристика, при цьому n0
залишається незмінним,
а Δn –
збільшується, тобто характеристика
стає м’якшою.
Регулювальний реостат Rрег дозволяє змінювати струм збудження двигуна Iзб і тим самим його магнітний потік головних полюсів Ф. Згідно з виразом для механічної характеристики при цьому змінюватиметься і швидкість обертання двигуна. У колі обмотки збудження жодних вимикачів і запобіжників не встановлюють, оскільки при розриві цього кола і невеликому навантаженні на валу швидкість двигуна різко зростає (він йде в «рознос»). При цьому сильно збільшується струм якоря і виникає круговий вогонь на колекторі. Все це може призвести до руйнування якоря і аварії
І з
аналітичного виразу для механічної
характеристики шунтового двигуна
з
аналітичного виразу для механічної
характеристики шунтового двигуна
![]() випливають можливі способи регулювання
частоти обертання валу двигуна:
випливають можливі способи регулювання
частоти обертання валу двигуна:
Зміною напруги живлення Uжив. Цей спосіб застосовується тільки при Iзб = const, тобто при роздільному живленні кіл обмотки якоря і обмотки збудження. При зміні напруги Uжив змінюється тільки частота обертання на холостому ході n0, а жорсткість механічної характеристики залишається постійною, оскільки Δn від напруги не залежить. Зміна механічної характеристики при зазначеному способі регулювання показаний на рис. 7.67. В такий спосіб забезпечується плавне економічне регулювання в широкому діапазоні. Найбільша частота обертання обмежується умовами комутації (при збільшені Uжив збільшується Iя), а найменша – умовами охолодження двигуна. Спосіб потребує регульованого джерела живлення, що технічно важко здійснити.
Р
 егулюванням
опору в колі живлення якоря.
Для цього послідовно в коло якоря
включають регулювальний реостат (на
рис. 7.66 – Rдод),
розрахований на тривале проходження
по ньому струму, на відміну від пускового
реостата. При збільшенні опору кола
якоря (Rя
= Rя
+ Rдод)
зростає Δn,
що веде до зменшення частоти обертання,
при цьому жорсткість механічної
характеристики зменшується (рис. 7.68).
Цей спосіб забезпечує плавне регулювання
в широкому діапазоні, але тільки у бік
зменшення від номінальної частоти. Але
він неекономічний через значні втрат
електроенергії в регулювальному
реостаті, які інтенсивно ростуть зі
збільшенням потужності двигуна.
егулюванням
опору в колі живлення якоря.
Для цього послідовно в коло якоря
включають регулювальний реостат (на
рис. 7.66 – Rдод),
розрахований на тривале проходження
по ньому струму, на відміну від пускового
реостата. При збільшенні опору кола
якоря (Rя
= Rя
+ Rдод)
зростає Δn,
що веде до зменшення частоти обертання,
при цьому жорсткість механічної
характеристики зменшується (рис. 7.68).
Цей спосіб забезпечує плавне регулювання
в широкому діапазоні, але тільки у бік
зменшення від номінальної частоти. Але
він неекономічний через значні втрат
електроенергії в регулювальному
реостаті, які інтенсивно ростуть зі
збільшенням потужності двигуна.
Р
 егулюванням
струму обмотки збудження.
Для зміни струму збудження Ізб,
а відповідно і магнітного потоку Ф у
коло обмотки збудження включають
регулювальний реостат Rрег
(рис. 7.66). При збільшенні опору реостата
Rрег
зменшується струм збудження Iзб
і, отже зменшується магнітний потік Ф,
а частота обертання збільшується і
навпаки. При зміні магнітного потоку
Ф змінюється жорсткість механічної
характеристики, так як змінюються і n0
і Δn
(рис. 7.69). Оскільки Ізб << Ія
(Ізб
= 0,01÷0,07 Ія ном),
то потужність втрат на регулюванні
незначна. Але діапазон регулювання
невеликий. Пояснюється це тим, що нижня
межа частоти обумовлена насиченням
машини, що обмежує значення магнітного
потоку Ф, а верхня межа частоти –
небезпекою «розносу» двигуна і посиленням
впливу реакції якоря, спотворююча дія
якого при ослабленні основного магнітного
потоку Ф посилюється і веде до іскріння
і круговому вогню на колекторі.
егулюванням
струму обмотки збудження.
Для зміни струму збудження Ізб,
а відповідно і магнітного потоку Ф у
коло обмотки збудження включають
регулювальний реостат Rрег
(рис. 7.66). При збільшенні опору реостата
Rрег
зменшується струм збудження Iзб
і, отже зменшується магнітний потік Ф,
а частота обертання збільшується і
навпаки. При зміні магнітного потоку
Ф змінюється жорсткість механічної
характеристики, так як змінюються і n0
і Δn
(рис. 7.69). Оскільки Ізб << Ія
(Ізб
= 0,01÷0,07 Ія ном),
то потужність втрат на регулюванні
незначна. Але діапазон регулювання
невеликий. Пояснюється це тим, що нижня
межа частоти обумовлена насиченням
машини, що обмежує значення магнітного
потоку Ф, а верхня межа частоти –
небезпекою «розносу» двигуна і посиленням
впливу реакції якоря, спотворююча дія
якого при ослабленні основного магнітного
потоку Ф посилюється і веде до іскріння
і круговому вогню на колекторі.
На рис. 7.70 показано двигун паралельного збудження з пусковим Rп і регулювальним Rрег реостатами. Пусковий реостат необхідний для того, щоб обмежити струм в якорі при пуску, поки ЕРС якоря дорівнює нулю або мала, тому він включається послідовно з обмоткою якоря.
Оскільки ЕРС Ея пропорційна потоку Ф і бажано, щоб вона зростала якомога швидше, починати пуск шунтового двигуна слід завжди при найбільшому струмі збудження при виведеному на нульове значення регулювальному реостаті Rрег, поступово збільшуючи оберти валу.
При
пуску, коли якір ще нерухомий, n
= 0 ЕРС Eя
= 0 пусковий струм якоря
![]() і, оскільки опір якоря невеликий, може
в 10 ÷ 20 разів перевищувати номінальний
струм, що небезпечно як для двигуна
(посилення іскріння, динамічні
перевантаження), так і для джерела
живлення.
і, оскільки опір якоря невеликий, може
в 10 ÷ 20 разів перевищувати номінальний
струм, що небезпечно як для двигуна
(посилення іскріння, динамічні
перевантаження), так і для джерела
живлення.
Щоб
уникнути аварії струм пуску обмежується
за допомогою пускового реостату Rп.
Тоді струм при пуску
![]() і буде у допустимих межах. На початку
пуску вводиться весь опір реостата. У
міру збільшення швидкості якоря виникає
противо-ЕРС Ея,
яка обмежує пусковий струм. Поступово
виводячи ступінь за ступенем опір
реостата Rп
з кола якоря, збільшують напругу, що
підводиться до якоря. Спосіб пуску
двигуна за допомогою пускового реостату
називається реостатним.
і буде у допустимих межах. На початку
пуску вводиться весь опір реостата. У
міру збільшення швидкості якоря виникає
противо-ЕРС Ея,
яка обмежує пусковий струм. Поступово
виводячи ступінь за ступенем опір
реостата Rп
з кола якоря, збільшують напругу, що
підводиться до якоря. Спосіб пуску
двигуна за допомогою пускового реостату
називається реостатним.
П ри
роботі двигуна буває необхідно змінити
напрямок обертання валу, тобто здійснити
реверсування.
Для цього слід поміняти місцями кінці
обмотки збудження відносно кінців
обмотки якоря. Отже, реверсування двигуна
здійснюється або зміною полярності
напруги на обмотці якоря, або на обмотці
збудження. В обох випадках змінюється
знак електромагнітного моменту двигуна
М і
відповідно напрямок обертання ротора.
ри
роботі двигуна буває необхідно змінити
напрямок обертання валу, тобто здійснити
реверсування.
Для цього слід поміняти місцями кінці
обмотки збудження відносно кінців
обмотки якоря. Отже, реверсування двигуна
здійснюється або зміною полярності
напруги на обмотці якоря, або на обмотці
збудження. В обох випадках змінюється
знак електромагнітного моменту двигуна
М і
відповідно напрямок обертання ротора.
У електроприводах з двигунами постійного струму застосовують три способи гальмування: динамічне, рекуперативне і гальмування противключенням.
Динамічне гальмування електродвигуна постійного струму здійснюється відключенням живлення якоря і замиканням його обмотки накоротко або через деякий додатковий опір Rд (гальмівний реостат) – рис. 7.71. При цьому струм якоря змінює напрямок Iя = –Eя / (Rя + Rд) і електромагнітний момент Моб стає гальмівним. Електродвигун починає працювати як генератор, перетворюючи накопичену їм кінетичну механічну енергію в електричну. Ця енергія виділяється у вигляді тепла в опорі, на який замкнута обмотка якоря. Динамічне гальмування забезпечує зупинку електродвигуна.
Р івняння
механічної характеристики при Uя = 0
набуває виду
івняння
механічної характеристики при Uя = 0
набуває виду
![]() ,
її графіки для гальмівного режиму
розташовані в другому квадранті (рис.
7.72).
,
її графіки для гальмівного режиму
розташовані в другому квадранті (рис.
7.72).
У момент перемикання ключа К (рис. 7.71) двигун переходить з точки А природної характеристики рухового режиму 1 в точку В характеристики гальмівного режиму 2, момент Моб змінює знак і починається динамічне гальмування. Швидкість обертання зменшується, але при цьому різко зменшується і гальмівний момент (перехід із точки В в С). З метою збільшення гальмівного моменту проводиться зменшення додаткового опору Rд (перехід із точки С в точку D). Гальмування відбувається до нульової швидкості.
Рекуперативне (або генераторне) гальмування електродвигуна постійного струму відбувається в тому випадку, коли якір, включеного в мережу двигуна, обертається зі швидкістю, що перевищує швидкість ідеального холостого ходу. Тоді, наведена ЕРС Ея, перевищить значення напруги мережі Uжив і струм якоря змінює напрямок, машина переходить у генераторний режим, віддаючи енергію в мережу, електромагнітний момент стає гальмівним.
М еханічною
характеристикою в режимі рекуперативного
гальмування є продовження механічної
характеристики двигуна в другому
квадранті (n >
0, Mоб
< 0). Режим рекуперативного
гальмування виникає, наприклад, при
регулюванні напруги на якорі (рис. 7.73,
Uя2
< Uя1)1.
еханічною
характеристикою в режимі рекуперативного
гальмування є продовження механічної
характеристики двигуна в другому
квадранті (n >
0, Mоб
< 0). Режим рекуперативного
гальмування виникає, наприклад, при
регулюванні напруги на якорі (рис. 7.73,
Uя2
< Uя1)1.
У момент зменшення напруги живлення двигун переходить з точки А характеристики 1 в точку В характеристики 2, момент Моб змінює знак і починається гальмування двигуна до точки С. Гальмування до зупинки таким способом неможливо і він використовується, в основному, при гальмуванні на високих швидкостях. Спосіб економічний завдяки можливості віддачі електроенергії в мережу
Гальмування противключенням електродвигуна постійного струму здійснюється шляхом зміни полярності напруги і струму в обмотці якоря (рідше в обмотці збудження). При цьому струм якоря Iя = (–Uя – Eя) / Rя змінює напрямок і значення його різко зростає, оскільки тепер напруга Uя і ЕРС Ея діють в одному напрямку. Тому при гальмуванні противключенням в коло якоря обов’язково включається додатковий опір Rд.
При взаємодії струму якоря з магнітним полем обмотки збудження створюється гальмівний момент, який зменшується в міру зменшення швидкості обертання електродвигуна. При зменшенні частоти обертання електродвигуна до нуля електродвигун повинен бути відключений від мережі, інакше він почне обертатись у зворотний бік.
 Зміна
полярності напруги на якорі означає,
що зміниться і знак частоти обертання
холостого ходу n = –n0,
тобто механічна характеристика пройде
через третій квадрант (рис.
7.74). У момент перемикання напруги двигун
переходить із точки А
природної характеристики рухового
режиму 1 в точку В
реостатної характеристики гальмівного
режиму 2, момент Моб
змінює знак і починається інтенсивне
зниження n.
В точці С
частота обертання стає рівною нулю, і
його необхідно відключити від джерела
живлення. Якщо цього не зробити, то ротор
почне обертатися в протилежному напрямку
і перейде в сталий режим в точці D
реостатної або, якщо Rд
відключити, в точці D'
нової природної характеристики 3, тобто
відбудеться реверсування двигуна.
Зміна
полярності напруги на якорі означає,
що зміниться і знак частоти обертання
холостого ходу n = –n0,
тобто механічна характеристика пройде
через третій квадрант (рис.
7.74). У момент перемикання напруги двигун
переходить із точки А
природної характеристики рухового
режиму 1 в точку В
реостатної характеристики гальмівного
режиму 2, момент Моб
змінює знак і починається інтенсивне
зниження n.
В точці С
частота обертання стає рівною нулю, і
його необхідно відключити від джерела
живлення. Якщо цього не зробити, то ротор
почне обертатися в протилежному напрямку
і перейде в сталий режим в точці D
реостатної або, якщо Rд
відключити, в точці D'
нової природної характеристики 3, тобто
відбудеться реверсування двигуна.
У
серієсному
двигуні
(рис. 7.64-б) обмотка збудження
і якір з’єднанні послідовно і тому
струм збудження двигуна одночасно є
струмом якоря Ізб
= Ія.
Магнітний потік індуктора пропорційний
струму якоря: Ф = k1Iя,
де k1
– коефіцієнт пропорційності. Момент
на валу двигуна пропорційний квадрату
струму якоря: Моб = kIяФ = kk1Iя2.
Звідки
![]() .
Рівняння механічної характеристики
отримується наступним чином:
.
Рівняння механічної характеристики
отримується наступним чином:
Uжив
= Ея
+ ІяRя
= cnФ +
Rя![]()
 .
.
Графік
залежності n
= f(Mоб)
в цьому випадку матиме вид, показаний
на рис. 7.75-а (лінія
1). З графіка видно, що при
ненасиченості магнітної системи (при
малих навантаженнях) зі збільшенням
навантаження частота обертання різко
зменшується. Але потім настає насичення
магнітної системи двигуна, магнітний
потік при зростанні навантаження
практично не змінюється і характеристика
набуває майже прямолінійного характеру.
Таку характеристику прийнято н азивати
м’якою. Отже, механічна характеристика
м’яка, має гіперболічний форму і
забезпечує стійку роботу двигуна.
М’якість характеристики зумовлена
тим, що зі збільшенням моменту навантаження
і відповідно зменшенням швидкості
зростають струм і потік збудження.
азивати
м’якою. Отже, механічна характеристика
м’яка, має гіперболічний форму і
забезпечує стійку роботу двигуна.
М’якість характеристики зумовлена
тим, що зі збільшенням моменту навантаження
і відповідно зменшенням швидкості
зростають струм і потік збудження.
Крім природної характеристики 1 (рис. 7.75-а), можна шляхом включення додаткових опорів Rрег (рис. 7.75-б) в коло якоря отримати сімейство реостатних характеристик 2, 3 і т.д. (рис.7.75-а). Чим більше величина Rрег, тим нижче розташовується характеристика.
Отже, зі збільшенням навантаження швидкість двигуна різко падає. Зі зменшенням навантаження на валу двигун розвиває дуже велику частоту обертання; кажуть, що «двигун йде в рознос». Це також призводить до руйнування двигуна і аварії. Тому робота двигуна послідовного збудження або його пуск при навантаженні на валу менше 25% від номінальної неприпустима.
Слід зазначити, що при регулюванні струму збудження при розриві в колі збудження (Ізб = 0) і оберти двигуна наближається до нескінченності
Двигун послідовного збудження не можна пускати без навантаження на валу, тому що при Моб → 0, частота обертання n → ∞.
Квадратична залежність моменту від струму дозволяє отримувати у двигуна послідовного збудження більший пусковий момент, ніж у двигуна паралельного або незалежного збудження.
Пуск, реверсування, гальмування і регулювання швидкості двигунів послідовного збудження здійснюється тими ж способами, що і двигунів паралельного та незалежного збудження з урахуванням специфіки включення обмоток.
Так, регулювання частоти обертання двигуна послідовного збудження можна здійснити двома способами:
– зміною напруги Uжив;
– зміною величини магнітного потоку Ф.
Для зміни напруги в коло якоря включають регулювальний реостат Rрег (рис. 7.75-б). Зі збільшенням опору реостата зменшується напруга на вході двигуна і частота його обертання. Цей метод застосовують для двигунів невеликої потужності. У випадку значної потужності цей спосіб неекономічний з-за великих габаритів і великих втрат потужності в регулювальному реостаті.
Зміна напруги можлива також при живленні його від джерела постійного струму з регульованою напругою. При зменшенні напруги його механічні характеристики зміщуються вниз, практично не змінюючи своєї кривизни (рис. 7.75-а).
Величину магнітного потоку Ф можна змінювати шунтуванням обмотки збудження, шунтуванням обмотки якоря, секціонуванням обмотки збудження.
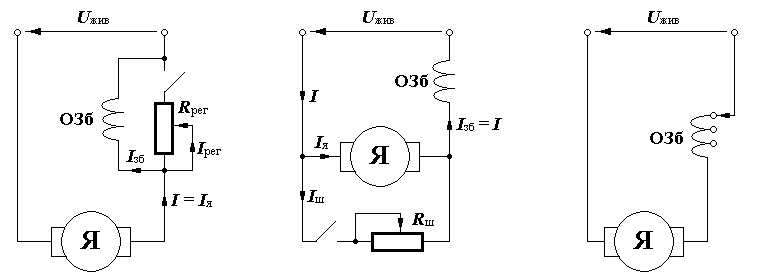
а) б) в)
Рис. 7.76.
Шунтування обмотки збудження здійснюється паралельним підключенням до обмотки збудження реостату Rрег (рис. 7.76-а). Зменшення опору цього реостата веде до зниження струму збудження Iзб = I – Iрег, а отже, до збільшення частоти обертання, оскільки магнітний потік пропорційний струму збудження, а частота обертання n зворотно пропорційна магнітному потоку. Спосіб економічний, але погіршує комутацію і охолодження (межа регулювання 25–35%)
Шунтування обмотки якоря здійснюється паралельним підключенням до обмотки якоря реостату Rш (рис. 7.76-б). При цьому струм збудження зросте: Ізб = Ія + Іш, що викличе зростання магнітного потоку Ф і, відповідно, зменшення частоти обертання n. Цей спосіб неекономічний і застосовується рідко, зокрема, коли треба швидко, але на велику величину змінити частоту обертання.
При секціонуванні обмотка збудження має конструкцію, що дозволяє включати в роботу різне число витків wзб, при цьому змінюється магніторушійна сила обмотки збудження (Fзб = wзб·Iзб), отже змінюється основний магнітний потік Ф і, відповідно, частота обертання.
Двигуни постійного струму широко використовуються на електрифікованому транспорті, у вантажопідйомних механізмах, в гірничій техніці, в різних схемах автоматичного регулювання та керування, у електроприводі промислових роботів і т. п. Як електропривод у транспортних засобах тягові двигуни трамвая мають потужності від 33 до 54,5 кВт, 550 В, 560–660 об / хв. Для магістральних електровозів застосовуються двигуни потужністю 320-450 кВт, 750 В і 1500 В. Кранові двигуни виготовляються від 3 до 100 кВт. Для приводу прокатних станів встановлюються двигуни постійного струму потужністю в кілька тисяч кіловат. В автомобільних стартерах для зменшення номінальної напруги застосовують двигун постійного струму з чотирма щітками. Завдяки цьому, еквівалентний комплексний опір ротора зменшується майже в чотири рази. Статор, такого двигуна, має чотири полюси (дві пари полюсів). Пусковий струм в автомобільних стартерах складає близько 200 ампер.
До переваг двигунів постійного струму можна віднести:
простота пристрою і управління;
практично лінійні механічна і регулювальна характеристики двигуна;
легко регулювати частоту обертання;
хороші пускові властивості (великий пусковий момент).
Серед недоліків можна відзначити:
висока вартість виготовлення;
необхідність профілактичного обслуговування колекторно-щіткових вузлів;
обмежений термін служби через зношування колектора.
(Останні два недоліки на сучасному етапі розвитку ДПТ майже не відчутні).