

7.2.8. Принцип роботи синхронного двигуна.
Більшість синхронних двигунів виготовляється на швидкості обертання 1500, 1000, 750, 600 об/хв і менш. У цих двигунів ротор виконується з явно вираженими полюсами і обмоткою збудження, що живиться від джерела постійного струму. Трифазна обмотка статора, як і у асинхронного двигуна, приєднується до мережі живлення трифазним змінним струмом. Наочно принцип дії синхронного двигуна показаний в п. 7.2.1.
Д ля
більш детального з’ясування принципу
дії синхронного двигуна звернемося до
моделі, зображеної на рис. 7.35. Магнітне
поле, створене трифазним струмом, що
протікає по обмотках статора, представлене
у вигляді двох полюсів N'
і S'
постійного магніту, що
обертається з незмінною швидкістю n1.
Ротор також зображений у вигляді
постійного магніту з полюсами N
і S.
Обидві магнітні системи – зовнішня і
внутрішня, розділені повітряним зазором,
можуть обертатися навколо осі.
ля
більш детального з’ясування принципу
дії синхронного двигуна звернемося до
моделі, зображеної на рис. 7.35. Магнітне
поле, створене трифазним струмом, що
протікає по обмотках статора, представлене
у вигляді двох полюсів N'
і S'
постійного магніту, що
обертається з незмінною швидкістю n1.
Ротор також зображений у вигляді
постійного магніту з полюсами N
і S.
Обидві магнітні системи – зовнішня і
внутрішня, розділені повітряним зазором,
можуть обертатися навколо осі.
Якщо обмотку збудження двигуна приєднати до джерела постійного струму, а обмотку статора підключити до трифазної мережі, то магнітне поле статора почне обертатися з постійною швидкістю навколо нерухомого ротора, причому ця швидкість практично встановлюється миттєво. Припустимо, що n1 = 3000 об./хв.; це означає, що протягом секунди повз кожний полюс ротора буде проходити по 50 раз полюс N' і полюс S' обертового поля статора. Отже, на ротор будуть діяти сили, направлені то в один, то в інший бік; середнє значення моменту сил дорівнює нулю. У результаті ротор, що має певний моментом інерції, не зрушиться з місця. Іншими словами синхронні двигуни не мають пускового моменту.
Якщо будь-яким способом заздалегідь розігнати ротор до синхронної швидкості, то сили взаємодії полюсів ротора N – S з полюсами N' – S' поля статора, що обертається, забезпечать обертання ротора з швидкістю поля n1.
У режимі ідеального холостого ходу (момент опору Моп = 0) осі обох магнітних систем співпадають (рис. 7.36-а). На полюси ротора діють радіальні сили F1 і F2, які не створюють ні обертового моменту, ні моменту опору.
Якщо до вала двигуна прикласти механічне навантаження, що створює момент опору Моп, то вісь ротора зміститься назад (відносно осі полюсів поля, що обертається) на кут , який залежить від величини моменту Моп. На полюси ротора тепер діятимуть сили тяжіння F1 і F2, тангенціальні складові яких F1 і F2 створюють обертовий момент М = Моп, який долає момент опору механічного навантаження (рис. 7.36-б)
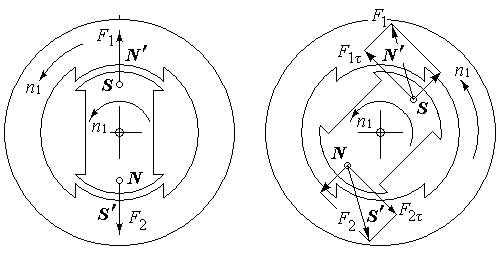
а) б)
Рис. 7.36.
Якщо
угледіти різницю між генератором і
двигуном в тому, що генератор віддає
струм в мережу, а двигун – споживає, то
одразу можна зобразити еквівалентну
схему заміщення двигуна, змінивши
напрямок струму якоря. Еквівалентна
схема двигуна аналогічна схемі генератора
(рис. 7.29) і представлена на
рис. 7.37-а. За наведеною схемою записується
внутрішнє рівняння синхронного двигуна:
![]() .
Тепер можна побудувати векторну діаграму
синхронного генератора (рис. 7.37-б).
.
Тепер можна побудувати векторну діаграму
синхронного генератора (рис. 7.37-б).
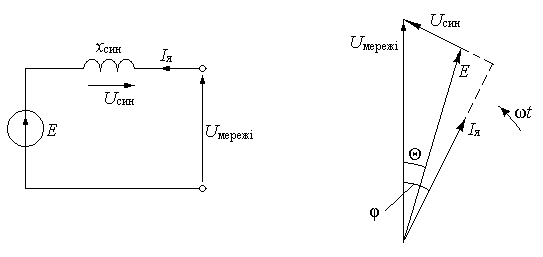
а) б)
Рис. 7.37.
Порівняння векторних діаграм генератора (рис. 7.28) і двигуна (рис. 7.37-б) показує, що у генератора Е випереджає Uмережі на кут Θ, а у двигуна Е відстає від Uмережі той же кут. Це означає, що у генератора і двигуна тільки різні знаки Θ. Тому, вся теорія синхронного генератора може бути розповсюджена і на двигун.
Залежність M() при Е0 = const (тобто при незмінному струмі збудження) називається як і генератора кутовою характеристикою синхронного двигуна (рис. 7.38).

Рис. 7.38.
Стійка
робота синхронного двигуна можлива,
коли при збільшенні моменту опору Моп
і відповідному зростанні кута
електромагнітний обертовий момент
також збільшується, тобто коли
![]() .
Отже, при зміні
від 0
до 90
робота двигуна буде стійкою. При
90
робота двигуна неможлива, оскільки при
цьому збільшення механічного навантаження
на валу двигуна супроводжується
зменшенням обертового моменту.
.
Отже, при зміні
від 0
до 90
робота двигуна буде стійкою. При
90
робота двигуна неможлива, оскільки при
цьому збільшення механічного навантаження
на валу двигуна супроводжується
зменшенням обертового моменту.
При роботі двигуна з номінальним навантаженням і номінальним струмом збудження кут звичайно не перевищує 25 З0. При цих значеннях кута відношення максимальною моменту до номінального, що визначає короткочасну перевантажувальну здатність синхронною двигуна, дорівнює
![]()
Синхронним двигунам властиві три характеристики: механічна – n = f1(M); кутова – Mоб = f2(Θ); регулювальна – Iя = f3(Iзб). Дві перші були розглянуті раніше і мають вид, показаний на рис. 7.39-а і 7.39-б відповідно. Оскільки при зміні навантаження двигуна відбувається лише порівняно невелике зміщення ротора щодо обертового поля, то механічна характеристика синхронного двигуна представляється лінією, паралельною осі абсцис (рис. 7.39-а). Двигун має постійну частоту обертання при зміні моменту аж до максимального значення. Про регулювальну – поговоримо докладніше (вона ще називається U-подібна характеристика асинхронного двигуна).

а) б)
Рис. 7.39.
U-подібна характеристика є Iя = f3(Iзб) при незмінній потужності Р. Отже для різних потужностей матимемо родину характеристик. Вони мають вид, представлений на рис. 7.40. Ці характеристики можна отримати, використовуючи векторні діаграми синхронного двигуна.
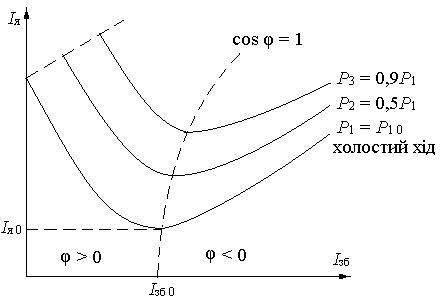
Рис. 7.40.
При недозбудженні синхронного двигуна φ > 0, при перезбудженні φ < 0. Це означає, що синхронні двигуни можна використовувати як компенсатори cos φ в енергосистемах (див. п. 2.4.5).
Найбільш істотною особливістю роботи синхронного двигуна є процес включення його в мережу, званий пуском.
Власний пусковий момент синхронного двигуна, як зазначалось вище, дорівнює нулю, тому що внаслідок інерції ротора потік збудження не може відразу досягти синхронної частоти обертання потоку статора. Тому після включення збудження двигуна при нерухомому роторі поля статора і ротора переміщаються відносно одне одного з великою швидкістю, і середня взаємодія цих полів дорівнює нулю.
Пуск синхронного двигуна можна здійснити за допомогою перетворювача частоти, який плавно підвищує частоту обертання поля якоря від нуля до номінального значення в міру розгону двигуна. Такий спосіб пуску називається частотним.
Можливий також пуск синхронного двигуна за допомогою додаткового асинхронного двигуна, що здійснює попередній розгін недозбудженного синхронного двигуна до «підсинхронної» частоти обертання. Потім проводиться включення синхронного двигуна в мережу і його синхронізація подібно до того, як це робиться для синхронних генераторів.
О днак
найбільш поширеним є асинхронний пуск
синхронного двигуна. З цією метою на
роторі в спеціальних пазах полюсних
наконечників розміщують короткозамкнуту
обмотку у вигляді латунних, мідних або
бронзових стрижнів, з’єднаних по торцях
струмоводними кільцями. Ця обмотка
називається пусковою.
При використанні масивних плюсів, а
також у разі неявнополюсних синхронних
двигунів з ротором у вигляді масивного
сталевого циліндра роль пускової обмотки
виконує зовнішня поверхня полюсів або
циліндра ротора.
днак
найбільш поширеним є асинхронний пуск
синхронного двигуна. З цією метою на
роторі в спеціальних пазах полюсних
наконечників розміщують короткозамкнуту
обмотку у вигляді латунних, мідних або
бронзових стрижнів, з’єднаних по торцях
струмоводними кільцями. Ця обмотка
називається пусковою.
При використанні масивних плюсів, а
також у разі неявнополюсних синхронних
двигунів з ротором у вигляді масивного
сталевого циліндра роль пускової обмотки
виконує зовнішня поверхня полюсів або
циліндра ротора.
Схема асинхронного пуску представлена на рис. 7.41. Відповідно до цієї схеми процес пуску виконується в два етапи. На першому етапі після включення обмотки статора в мережу ротор двигуна розганяється під дією асинхронного моменту до подсінхронной частоти обертання.
Обмотка збудження протягом першого етапу пуску замикається на активний опір Rп. Залишати обмотку збудження розімкнутої не можна, оскільки обертове поле статора наводить у ній в початковий період пуску значну ЕРС, здатну «пробити» ізоляцію обмотки збудження і небезпечну для експлуатаційного персоналу.
Ковзання
ротора складає
![]() .
.
Замикати обмотку збудження накоротко також недоцільно, тому що при цьому зростають провали в кривій асинхронного моменту. Обмотка збудження є однофазної обмоткою. Індукований в ній струм створює пульсуюче магнітне поле (див. п. 7.1.9). Складова цього поля, що прямо обертається, створює момент МІ, а складова, що обертається в протилежному напрямку – момент МІІ. При підсумовуванні цих моментів з моментом пускової обмотки в кривій результуючого моменту з’являються провали в зоні малих ковзань і в області ковзання s = 0,5, які можуть ускладнити пуск двигуна. Введення в коло обмотки збудження додаткового опору Rп дозволяє зменшити величину цих провалів.
Другий етап пуску починається, коли ротор досягне сталої частоти обертання (s = 0,03 ÷ 0,05), і обмотка збудження підключається до джерела постійного струму (збудника). Після включення збудження на ротор крім асинхронного моменту починає діяти синхронний момент, залежить від струму збудження Ізб і кута Θ.
О скільки
потужність на валу двигуна і обертовий
момент мають прямий зв’язок (Моб
= РΩ2,
де Ω2
– кутова частота обертання валу), то
кутову характеристику можна уявити як
залежність Р
= f2(Θ).
Родина цих залежностей для різних
струмів збудження показана на рис. 7.42.
Вони показують, що синхронні двигуни
допускають регулювання максимального
моменту. Це має дуже важливе значення
в аварійних режимах для збереження
стійкості паралельної роботи двигуна
з мережею.
скільки
потужність на валу двигуна і обертовий
момент мають прямий зв’язок (Моб
= РΩ2,
де Ω2
– кутова частота обертання валу), то
кутову характеристику можна уявити як
залежність Р
= f2(Θ).
Родина цих залежностей для різних
струмів збудження показана на рис. 7.42.
Вони показують, що синхронні двигуни
допускають регулювання максимального
моменту. Це має дуже важливе значення
в аварійних режимах для збереження
стійкості паралельної роботи двигуна
з мережею.
Синхронні двигуни звичайно проектуються для роботи в режимі перезбудження (φ > 0) з коефіцієнтом потужності cos φ = 0,9. Це дозволяє зменшити реактивну потужність синхронних генераторів на електростанціях і тим самим зменшити втрати в лініях електропередачі. Однак у порівнянні з асинхронними двигунами синхронні двигуни є більш дорогими, головним чином, через витрати, що пов’язані з виготовленням системи збудження. Синхронні двигуни також складніше асинхронних в конструктивному відношенні, потребують кваліфікованого обслуговування і менш надійні в експлуатації.
Вибір того чи іншого типу двигуна здійснюється на основі техніко-економічних розрахунків. При потужності 100-200 кВт синхронні двигуни часто виявляються вигідніше асинхронних.