

7.2.6.2. Робота синхронного генератора після включення в мережу.
Після
включення генератора в мережу поряд із
іншими умовами виконується рівняння
Ег = Uмережі.
У відповідності із еквівалентною схемою
заміщення фази генератора (рис. 7.29),
струм
 .
.
Це означає, що після підключення генератора до мережі він не споживає і не віддає в мережу ніяку потужність.
Щоб з’явився струм Ія необхідно порушити рівність Ег = Uмережі. Це досягається регулюванням струму збудження генератора. Припустимо, що після включення генератора збільшено струм збудження. Тоді Ег > Uмережі. Векторна діаграма, що відповідає цьому випадку, наведена на рис. 7.32-а.
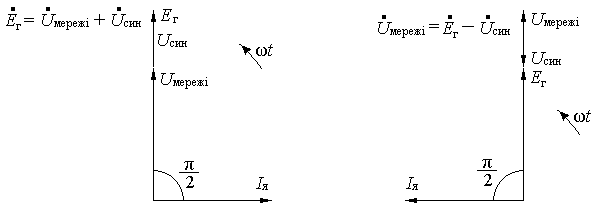
а) б)
Рис. 7.32.
Із діаграми видно, що активна потужність, яка передається в мережу, P = Uмережі·Ія·cos = 0, а реактивна Q = Uмережі·Ія·sin = Uмережі·Ія; вона має індуктивний характер. Отже, при збільшенні струму збудження P = 0, Q = Uмережі·Ія.
Далі, зменшимо струм збудження, щоб отримати Ег < Uмережі. Векторна діаграма для такого стану наведена на рис. 7.32-б. Знову буде той же результат, але реактивна потужність, що передається в мережу, носитиме ємнісний характер.
Отже, можна дійти висновку, що регулюванням струму збудження можна впливати на передачу в мережу лише реактивної потужності.
7.2.6.3. Регулювання активної потужності синхронного генератора.
Щ об
віддавати в мережу активну потужність
слід збільшити рушійний чинник на валу
генератора, тобто потужність первинного
джерела механічної енергії, що обертає
ротор. При цьому ніякого збільшення
частоти обертання валу не відбудеться,
оскільки генератор синхронізується
потужною мережею.
об
віддавати в мережу активну потужність
слід збільшити рушійний чинник на валу
генератора, тобто потужність первинного
джерела механічної енергії, що обертає
ротор. При цьому ніякого збільшення
частоти обертання валу не відбудеться,
оскільки генератор синхронізується
потужною мережею.
При збільшенні рушійного чинника між напругою Uмережі і Ея з’являється кут Θ, що показано на векторній діаграмі (рис. 7.33).
Виразимо
кут Θ через кут φ. Для цього розглянемо
трикутники abc
і cde
(рис. 7.33). Вони мають
однакові кути і, отже, подібні. Із
трикутника abd
маємо ab = Eя·sin Θ,
а із трикутника abc
– ab = Uсин·cos φ.
Прирівнюючи вирази, отримаємо
Eя·sin Θ = Uсин·cos φ.
Умножаючи обидві частини отриманого
рівняння на U
= Uмережі
і враховуючи, що Uсин
= Ія·хсин,
запишемо остаточно:
![]() .
Це активна потужність фази. Повна активна
потужність генератора дорівнює
.
Це активна потужність фази. Повна активна
потужність генератора дорівнює
![]() .
.
7.2.6.4. Обертовий момент на валу генератора.
Повний обертовий момент на валу генератора дорівнює
![]() .
.
Позначимо
![]() через Мmax.
Тоді Моб
= Мmax∙sinΘ.
Ця залежність називається кутовою
характеристикою синхронного генератора.
Вона п
через Мmax.
Тоді Моб
= Мmax∙sinΘ.
Ця залежність називається кутовою
характеристикою синхронного генератора.
Вона п оказана
на рис. 7.34.
оказана
на рис. 7.34.
Критичний
кут
![]() .
Якщо перевищити це значення, то генератори
мережі виходять із синхронізму, що
призводить до великих аварій. Щоб цьому
запобігти нормальний кут Θ в мережі не
повинен перевищувати 23º ÷ 27º.
.
Якщо перевищити це значення, то генератори
мережі виходять із синхронізму, що
призводить до великих аварій. Щоб цьому
запобігти нормальний кут Θ в мережі не
повинен перевищувати 23º ÷ 27º.
7.2.7. Синхронні двигуни
Синхронні двигуни найпотужніші із всіх існуючих електричних машин. Їх потужність досягає 103 кВт. Багато типів синхронних електродвигунів призначені для загальнопромислового призначення. Однак існує ряд машин, які мають вузьконаправлене застосування. Такі двигуни приводять у рух потужні кар’єрні екскаватори, компресорні, різинозмішувальні агрегати, прокатні стани, приводи потужних насосів і т.п.
Як відомо, електрична машина може перетворювати механічну енергію в електричну, тобто працювати як генератор, або, навпаки, електричну енергію – в механічну, тобто працювати як двигун. Ця властивість електричних машин називається оборотністю.
Вище ми бачили, що синхронний генератор, що працює паралельно з іншими генераторами, віддає в загальну мережу активну потужність, що виробляється ним. Нарівні з цим генератор може в залежність від величини струму збудження віддавати в мережу реактивну потужність (прийнявши на себе частину індуктивного навантаження системи) або отримувати від мережі реактивну потужність (тим самим збільшивши індуктивне навантаження, яке повинні прийняти на себе інші генератори).
Надалі ми побачимо, що синхронна машина, працюючи в режимі двигуна, подібно асинхронному двигуну споживає з мережі активну потужність відповідно до величини механічного навантаження на її валу. Що стосується реактивної потужності, то вона може бути індуктивною (при недозбужденні) або ємнісною (при перезбужденні).
У останньому випадку синхронний двигун приймає на себе частину індуктивного навантаження системи і виконує, як прийнято говорити, роль генератора реактивної потужності або фазокомпенсатора.