

7.1.5. Баланс активних потужностей асинхронного двигуна.
Баланс активних потужностей асинхронного двигуна можна уявити таким рівнянням
Ре = Р1е + Рм + Р2е + Рмех = Р1е + Рм + Р2е + Рмех + Р.
Тут:
Ре = 3U1I1cos 1 – потужність, що споживається двигуном з мережі;
Р1е = 3 I12R1 – електричні втрати в обмотці статора (втрати в міді);
Рм – магнітні втрати в сталі статора;
Магнітні втрати в роторі пропорційні частоті f2, дуже малі і ними нехтують.
Р2е = 3 I22R2 – електричні втрати в обмотці ротора (втрати в міді);
Рмех – повна механічна потужність, що розвивається двигуном;
Рмех – механічні втрати в двигуні;
Р – корисна потужність на валу двигуна.
Корисна механічна потужність двигуна Р менша за потужність Рмех на величину механічних втрат в двигуні: Р = Рмех – Рмех.
Величина Ре м = Ре – Р1е – Рм уявляє собою електромагнітну потужність двигуна, що передається від статора до ротору через обертове магнітне поле.
В заводському паспорті, на щитку двигуна і в каталогах вказується не споживана з мережи електрична потужність Ре, а корисна механічна потужність Рн на валу двигуна при номінальному режимі роботи.
7.1.6. Режими роботи асинхронних машин.
Вище
(див. п. 7.1.4) була отримана формула для
обертового моменту асинхронного двигуна
 .
.
Якщо за цією формулою побудувати графік залежності Моб(s) при зміні у широких межах ковзання s, то отримується крива, показана на рис. 7.12.
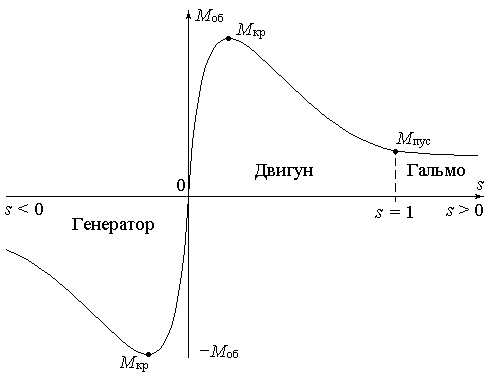
Рис. 7.12
На цьому графіку проглядаються три області, які відповідають трьом режимам роботи асинхронної машини:
Режим двигуна (0 < s ≤ 1).
Режим генератора (момент на валу від’ємний при s < 0).
Режим електромагнітного гальма
 .
.
Останній режим – режим противключення, коли вал із ротором обертається в протилежний бік відносно напрямку обертання магнітного поля.
7.1.7. Регулювання частоти обертання валу асинхронного двигуна.
Регулювати
частоту обертання валу асинхронного
двигуна можна трьома способами. Перші
два випливають із формули
![]() (див. п. 7.1.2), а третій – із співвідношення
n2 = n1(1
– s) (див.
п. 7.1.1).
(див. п. 7.1.2), а третій – із співвідношення
n2 = n1(1
– s) (див.
п. 7.1.1).
Отже, ці способи такі:
Зміною частоти змінного струму мережі живлення f.
Зміною числа пар полюсів р.
Ковзанням s, що можливо тільки у машин із фазним ротором.
Зміна частоти змінного струму. Найбільш перспективним способом регулювання частоти обертання асинхронного двигуна є частотний. При цьому способі частоту змінного струму, що підводиться до обмотки статора двигуна, змінюють за допомогою спеціального пристрою – перетворювача частоти. Зміна частоти зумовлює зміну швидкості обертання магнітного поля n1, а це, в свою чергу, – до зміни швидкості обертання ротора. Регулювання зміни частоти струму вигідно здійснювати, коли є велика група двигунів, що вимагають спільного плавного регулювання швидкості обертання.
Зміна числа полюсів електродвигуна. Для можливості зміни числа пар полюсів електродвигуна статор його виконують або з двома самостійними трифазними обмотками, або з однією трифазною обмоткою, яку можна переключати на різні числа полюсів.
Обмотки котушок кожної з фаз складаються з двох секцій. Дві секції однієї фази при їх з’єднані послідовно створюють чотири магнітних полюси. Ті ж секції, з’єднані паралельно між собою, створять тільки два полюси. Перемикання секцій обмоток статора здійснюється за допомогою спеціального апарата – контролера. При цьому способі регулювання швидкості обертання валу двигуна відбувається стрибками.
Регулювання швидкості обертання валу двигуна шляхом зміни числа полюсів можна проводити тільки у асинхронних двигунів з короткозамкненим ротором. Ротор з короткозамкненою обмоткою може працювати при різних числах полюсів магнітного поля. Навпаки, ротор двигуна з фазною обмоткою може працювати нормально лише при певному числі полюсів поля статора. Інакше обмотку ротора також довелося б перемикати, що внесло б значні ускладнення в схему двигуна.
Введення опору в ланцюг ротора. Перші два способи регулювання швидкості обертання асинхронного двигуна вимагають або спеціального виконання двигуна, або наявності спеціального перетворювача частоти і тому широкого поширення не отримали.
Третій спосіб регулювання швидкості обертання асинхронних двигунів полягає в тому, що під час роботи двигуна в коло обмотки ротора вводять опір регулювального реостата (див. п. 7.1.3).
Із збільшенням активного опору кола ротора зростає величина ковзання s, відповідна заданому значенню обертаючого моменту М (величина обертаючого моменту, що розвивається двигуном, дорівнює моменту опору на валу двигуна). Таким чином, введенням додаткового активного опору в коло фазного ротора, збільшується ковзання s і, отже, знижується швидкість обертання ротора n2. Такий спосіб регулювання застосовується тільки для асинхронних двигунів з фазним ротором. Регулювальний реостат включають в коло ротора так само, як і пусковий реостат. Різниця між пусковим і регулювальним реостатом полягає в тому, що регулювальний реостат розрахований на тривалу дію струму. Для двигунів, у яких проводиться регулювання швидкості обертання шляхом зміни опору в колі ротора, пусковий та регулювальний реостати об’єднуються в один пускорегулювальний реостат. Недоліком цього способу регулювання є те, що в регулювальному реостаті відбувається значна втрата потужності, тим більша, чим ширше регулювання швидкості обертання двигуна.
Реверс асинхронних електродвигунів. Для зміни напрямку обертання (реверсування) асинхронного двигуна слід поміняти місцями два будь-яких проводи з трьох, що йдуть до обмоток статора. При цьому змінюється напрямок обертання магнітного поля статора і двигун стане обертатися в інший бік. Реверсування двигуна може бути здійснено за допомогою перемикача (перекидного рубильника), магнітного пускача та інших пристроїв.
Гальмування асинхронних двигунів. В умовах експлуатації нерідко виникає необхідність гальмування двигуна з метою прискорити його зупинку.
Гальмування електродвигунів може бути механічним, електричним і електромеханічним.
Електромеханічне гальмування здійснюється за допомогою стрічкового або колодкового гальма, що діє на гальмівний шків, закріплений на валу двигуна. Ослаблення стрічки або колодок здійснюється гальмівним електромагнітом, обмотка якого з'єднана паралельно з обмоткою статора двигуна.
Якщо при роботі двигуна переключити дві будь-які фази, то при цьому двигун почне розвивати обертаючий момент, спрямований у протилежний бік. Обертання ротора сповільнюється. Коли швидкість обертання наближається до нуля, слід відключити двигун від мережі, інакше під дією моменту, що розвивається, він почне обертатися в протилежному напрямку. Застосовуються й інші способи електричного гальмування асинхронних електродвигунів.