

6.4. Вибрационный контроль гпа
Вибрационный контроль технического состояния ГПА обычно осуществляется двумя способами: это виброконтроль корпуса с помощью поверхностных датчиков вибрации, устанавливаемых на корпусах подшипников турбины или электропривода, а также на корпусах редукторов, и виброконтроль ротора турбины и/или нагнетателя с помощью вихретоковых датчиков относительной вибрации, которые устанавливаются на статоре и контролируют вибросмещение ротора.
Виброконтроль корпуса турбо- и электропривода осуществляется аппаратурой виброконтроля с помощью пьезоэлектрических или электромагнитных (электродинамических) преобразователей (датчиков).
Пьезоэлектрические датчики применяются в комплекте с виброаппаратурой типа СВКА1. Все типы используемой виброаппаратуры имеют одинаковый принцип действия и отличаются между собой только схемными решениями, элементной базой электронных блоков и конструкцией датчиков.
Принцип действия аппаратуры основан на преобразовании пьезоэлектрическим вибропреобразователем вибрации в электрический сигнал и дальнейшей его обработке. Чувствительный элемент вибропреобразователя обычно состоит из двух кольцевых пьезопластин, электрически соединенных параллельно (рис. 6.13). Принцип действия вибропреобразователя основан на использовании явления пьезоэффекта. Под воздействием вибрации пьезопластина деформируется и на обкладках каждой пьезопластины появляется знакопеременный заряд, пропорциональный в рабочей полосе частот ускорению. Напряжения, создаваемые этими зарядами, поступают на дифференциальный вход согласующего усилителя КР (рис. 6.14). Согласующий усилитель в зависимости от модификации либо встроен в корпус вибропреобразователя, либо расположен отдельно. Согласующий усилитель необходим для согласования выходного сопротивления вибропреобразователя с линией связи и вторичной аппаратурой. Электрический сигнал с согласующего усилителя поступает на вход измерительного блока. Измерительный блок включает в себя следующие функциональные устройства: ячейку искрозащиты, фильтр верхних частот, интегратор, детектор среднеквадратичных значений, узел аварийной и предупредительной сигнализации. Интегратор производит интегрирование электрического сигнала и формирование амплитудно-частотной характеристики канала измерения. Виброускорение, информация о котором в виде электрического сигнала имеется на выходе вибропреобразователя, есть производная по времени от скорости, поэтому для получения информации о виброскорости необходимо произвести интегрирование электрического сигнала виброускорения. Фильтры нижних и верхних частот обеспечивают выделение вибросигнала частотой от 10 Гц до 1 кГц. Детектор выделяет среднеквадратическое значение электрического сигнала, пропорциональное виброскорости. Узел сигнализации служит для указания превышения уровня виброскорости свыше заданного значения. Временная задержка аварийной и предупредительной сигнализации может настраиваться в пределах от 0 до 10 с.
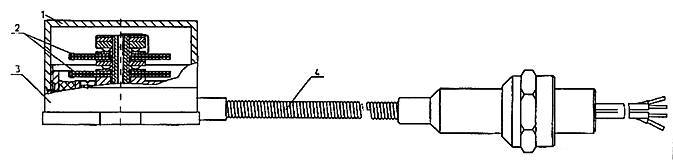
Рис. 6.13. Общий вид пьезоэлектрического вибропреобразователя:
1 - крышка; 2 - чувствительный элемент; 3 - основание; 4 - защитный металлорукав для кабеля
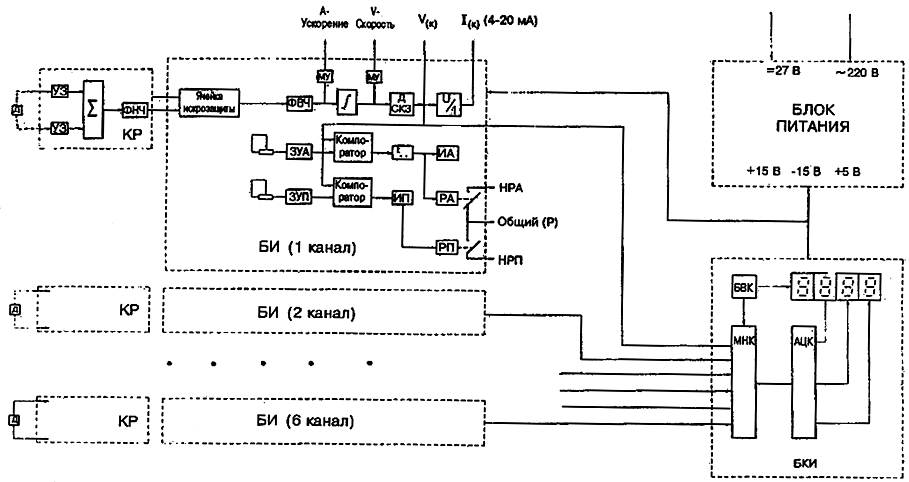
Рис. 6.14. Структурная схема аппаратуры виброконтроля:
УЗ - усилитель заряда;
![]() -
сумматор; ФНЧ - фильтр низких частот;
ФВЧ - фильтр высоких частот; ЗУА - блок
задания уровня аварии; ЗУП - блок задания
уровня предаварии; I - интегратор; Д -
детектор среднеквадратических СКЗ
значений;
-
сумматор; ФНЧ - фильтр низких частот;
ФВЧ - фильтр высоких частот; ЗУА - блок
задания уровня аварии; ЗУП - блок задания
уровня предаварии; I - интегратор; Д -
детектор среднеквадратических СКЗ
значений;
![]() -
блок задержки срабатывания; ИП - индикатор
предаварии; U/1 - преобразователь
напряжение-ток; ИА - индикатор аварии;
РА - реле аварии; РП - реле предаварии;
БВК - блок выбора канала; MUX - мультиплексор;
АЦП - аналогово-цифровой преобразователь
-
блок задержки срабатывания; ИП - индикатор
предаварии; U/1 - преобразователь
напряжение-ток; ИА - индикатор аварии;
РА - реле аварии; РП - реле предаварии;
БВК - блок выбора канала; MUX - мультиплексор;
АЦП - аналогово-цифровой преобразователь
Блок контроля и индикации (БКИ) служит для визуального контроля состояния вибрации по всем измерительным каналам.
На некоторых узлах ГПА, где требуется контролировать вибрацию с повышенной частотой (выше 1 кГц), например, на редукторах ГПА СТД-4000, контролируется и виброускорение. Отличие аппаратуры, контролирующей виброускорение, от описанной выше заключается в отсутствии в ней интегратора.
Электромагнитные датчики (рис. 6.15) применяются в аппаратуре типа АМV-3, используемой на части агрегатов "Дон-1", "Дон-2", "Аврора", ГТ-750-6. Конструктивно датчик состоит из двухсекционной катушки, внутри которой между двух постоянных магнитов "подвешен" стержневой магнит. При колебаниях стержневой магнит движется и пересекает электромагнитное поле, генерируемое катушкой. Таким образом, выходное напряжение катушки прямо пропорционально скорости виброколебаний.
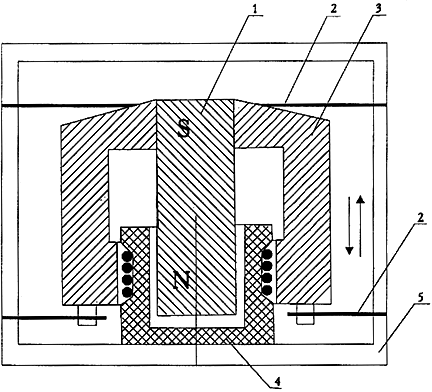
Рис. 6.15. Общий вид электромагнитного датчика:
1 - постоянный магнит; 2 - пружина; 3 - инерционная масса; 4 - неподвижная катушка; 5 - основание
В настоящее время электромагнитные датчики уступают место пьезоэлектрическим, так как имеют более низкую надежность, высокую стоимость, большие размеры, а также узкий диапазон рабочих температур (от -10 до 70 °С, в то время как некоторые модификации пьезоэлектрических датчиков имеют диапазон рабочих температур от -40 до 500 °С).
Осевой сдвиг и вибросмещение роторов нагнетателей контролируется посредством вихретоковых датчиков вибросмещения. Вышеописанная виброаппаратура практически не применяется для виброконтроля нагнетателей, так как корпус нагнетателя имеет несоизмеримо более высокие жесткость и массу по сравнению с ротором, и поэтому изменение вибрации ротора практически не меняет уровень вибрации его подшипников. В свою очередь, опорная система турбины и турбокомпрессора (т.е. система подшипник-корпус-стойка-фундамент) более податлива и менее стабильна.
В настоящее время на П "Мострансгаз" применяется различная аппаратура виброконтроля с вихретоковыми датчиками типов: КСА-15, ВСВ-331, АВКС-2, "Виброконтроль" и др. Вся аппаратура имеет идентичную конструкцию и принцип действия и отличается элементной базой электрических схем.
Каждый канал состоит из вихретокового преобразователя (рис. 6.16) и вторичной аппаратуры. Преобразователь вихретоковый состоит из катушки и блока согласования (рис. 6.17), которые могут иметь одинаковое или разное конструктивное исполнение. Вихретоковый преобразователь предназначен для преобразования величины зазора между торцом катушки преобразователя и объектом контроля в электрический выходной сигнал. Блок согласования преобразует напряжение питания в радиочастотный сигнал частотой 1-2 МГц, который излучается катушкой в окружающее пространство в виде электромагнитного поля. При отсутствии металла вблизи катушки потери мощности радиочастотного сигнала отсутствуют и выходное напряжение максимально. При приближении проводящего материала к рабочему торцу катушки вихревые токи, генерируемые в поверхности материала, приводят к потере мощности радиочастотного сигнала, пропорционально уменьшается выходное напряжение генератора. Вторичная аппаратура предназначена для измерения размаха вибросмещения, ее индикации, формирования аварийной и предупредительной сигнализации, контроля исправности преобразователя.
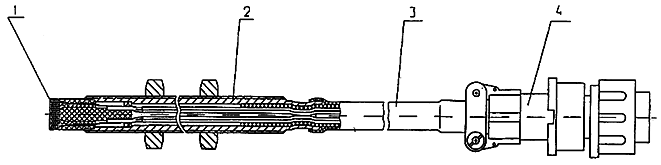
Рис. 6.16. Общий вид вихретокового преобразователя:
1 - чувствительный элемент; 2 - корпус; 3 - кабель в изоляционной трубке; 4 - разъем
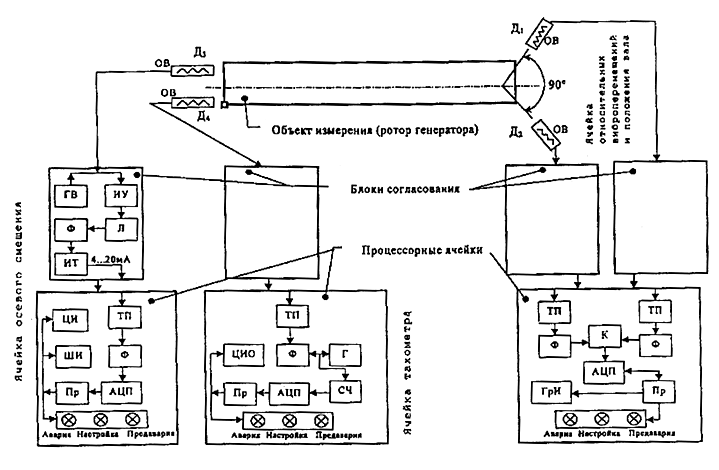
Рис. 6.17. Структурная схема вихретоковой аппаратуры измерения осевых перемещений и радиальных биений.
Датчиковая аппаратура: Д
+Д![]() - вихревые датчики; ОВ - обмотка возбуждения.
Блоки согласования: ГВ - генератор
возбуждения; ИУ - инструментальный
усилитель; Л - лианеризатор; Ф - фильтр;
ИТ - источник тока; стандартный выход -
4+20 мА.
- вихревые датчики; ОВ - обмотка возбуждения.
Блоки согласования: ГВ - генератор
возбуждения; ИУ - инструментальный
усилитель; Л - лианеризатор; Ф - фильтр;
ИТ - источник тока; стандартный выход -
4+20 мА.
Процессорные ячейки: ТП - токоприемник; Ф - фильтр; АЦП - аналогово-цифровой преобразователь; Пр - процессор; ШИ - шкальный индикатор; ЦИ - цифровой индикатор; Г - генератор; СЧ - счетчик; ЦИО - цифровой индикатор отображения; К - ключ; ГрИ - графический индикатор