

Расчетно-графическая работа №1 (Схема А) / mex
.docМинистерство транспорта Российской Федерации
Федеральное Агентство Железнодорожного Транспорта
ГОУ ВПО
Дальневосточный Государственный Университет Путей Сообщения
Институт Управления Автоматизации и Телекоммуникаций
Кафедра: “Детали машин”
КОНТРОЛЬНАЯ РАБОТА
На тему: Структурный и кинематический анализ рычажных механизмов
KP 190402 001 228
Выполнил: Линник А.И.
Проверил: Яворский Н.И.
Хабаровск
2006 г.
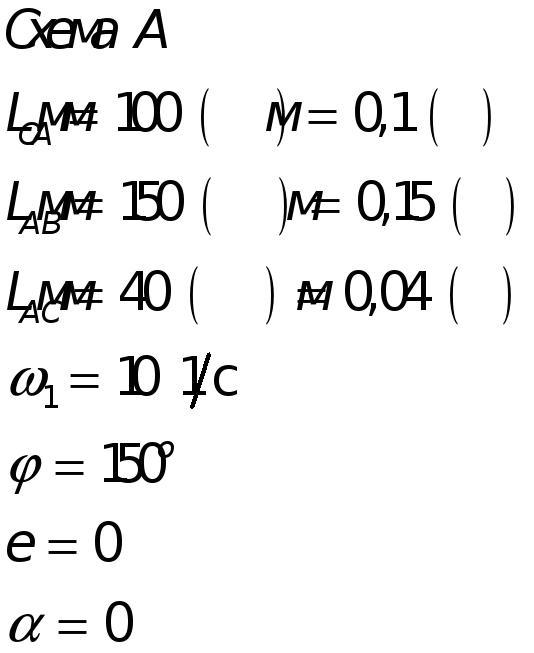
Исходные данные
Кривошип ОА вращается
равномерно с угловой скоростью
![]() по часовой стрелке. Размеры звеньев и
угол положения рабочего звена
соответственно равны
по часовой стрелке. Размеры звеньев и
угол положения рабочего звена
соответственно равны
Построение схемы механизма
![]() - масштабный коэффициент
показывает, сколько метров действительной
длины содержится в одном миллиметре
отрезка на чертеже. Тогда размеры всех
звеньев с учетом масштаба будут равны:
- масштабный коэффициент
показывает, сколько метров действительной
длины содержится в одном миллиметре
отрезка на чертеже. Тогда размеры всех
звеньев с учетом масштаба будут равны:

Построение плат механизма
начинаем с нанесения неподвижных точек
на поле листа. Положение шарнира O
выбираем произвольно. Далее точка A
движется по круговой траектории радиуса
ОА (кривошип) и ее положение определяется
углом
![]() .
Точка B
движется возвратно-поступательно
(ползун). Дизаксиал (расстояние е) равен
0. так под углом
.
Точка B
движется возвратно-поступательно
(ползун). Дизаксиал (расстояние е) равен
0. так под углом
![]() проводим наклонную линию и раствором
циркуля длиной AB
отмечаем на ней точку B.
Соединив отмеченные точки линиями,
получим план механизма в заданном
положении.
проводим наклонную линию и раствором
циркуля длиной AB
отмечаем на ней точку B.
Соединив отмеченные точки линиями,
получим план механизма в заданном
положении.
Структурное исследование механизма
Согласно принципу образования механизмов, сформулированному Ассуром Л.В. любой плоский рычажный механизм может быть представлен последовательным соединением к основному механизму групп Ассура. Группу Ассура образуют звенья, соединенные между собой низшими кинематическими парами и имеющие нулевую степень подвижности.
Количество ведущих звеньев механизма соответствует степени подвижности W механизма. Порядок произведения структурного анализа:
-
Отделить ведущее звено со стойкой
-
Учесть пассивные связи и лишние степени свободы и отбросить их
-
В механизме должны быть только кинематические поры 5-го класса. Пары 4-го класса должны быть заменены двумя парами 5-го класса
-
Начинать разделение надо от эвена наиболее удаленного от ведущего
-
Записать структурную формулу механизма
-
Определить степень подвижности механизма
Степень подвижности механизма (для механизма на плоскости)
![]()
![]() — число
подвижных
звеньев
механизма
— число
подвижных
звеньев
механизма
![]() — число
низших
кинематических
пар
(пар
5-го
класса)
— число
низших
кинематических
пар
(пар
5-го
класса)
![]() - число
высших
кинематических
пар
(пар
4-го
класса)
- число
высших
кинематических
пар
(пар
4-го
класса)
Класс группы Ассура определяется классом контурного эвена, входящего в состав группы. Если в состав группы входит:
Прямолинейное звено – II класс
Треугольное звено — III класс
Четырехугольное звено – IV класс
Порядок группы Ассура определяется количеством свободных элементов кинематических пор, которыми эта группа может присоединяться к основному механизму или стойке. Класс всего механизма определяем по наиболее высокой группе Ассура. Вид группы Ассура определяется на основании однообразия кинематических пар.
Данный механизм является первого класса, второго порядка, второго вида.
Кинематическое исследование механизма
Построение планов скоростей
Кинематическое исследование начинают с ведущего звено и далее для каждой структурной группы в порядке их присоединения.
Зная закон движения ведущего звено и длины всех звеньев механизма можно определить скорости его точек по величине и направлению в любом положении механизма, путем построения плана скоростей для этого положения.
График скоростей
Точка A кривошипа ОА совершает вращательное движение, поэтому вектор скорости точки A направлен перпендикулярно звену 1 в сторону вращения и численно равен по модулю.
![]()
Для определения скорости точки B воспользуемся графическим методом.
Теперь
для
построения
выбираем
на
плоскости
произвольную
точку
![]() —
полос
плана
скоростей,
которая
является
началом
отсчета
0, и
откладываем
на
ней
отрезок
—
полос
плана
скоростей,
которая
является
началом
отсчета
0, и
откладываем
на
ней
отрезок
![]() -
перпендикулярный
к
эвену
OA
в направлении
движения
точки
B.
Длина
этого
отрезка
изображает
на
плане
скоростей
вектор
скорости
точки
A
и
выбирается
произвольно.
Тогда
масштабный
коэффициент
плана
скоростей
можно
вычислить
по формуле.
-
перпендикулярный
к
эвену
OA
в направлении
движения
точки
B.
Длина
этого
отрезка
изображает
на
плане
скоростей
вектор
скорости
точки
A
и
выбирается
произвольно.
Тогда
масштабный
коэффициент
плана
скоростей
можно
вычислить
по формуле.
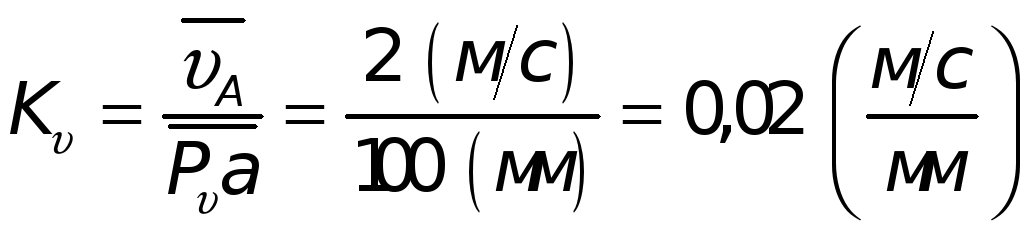
Масштаб плана скоростей показывает, сколько метров в секунду действительной скорости содержится в одном миллиметре отрезка на чертеже. Тогда определим скорости точки B и звена AB.
![]()
![]()
Затем, чтобы определить скорость точки C воспользуемся теоремой подобия.

Затем, чтобы определить скорость точки S2 воспользуемся теоремой подобия.
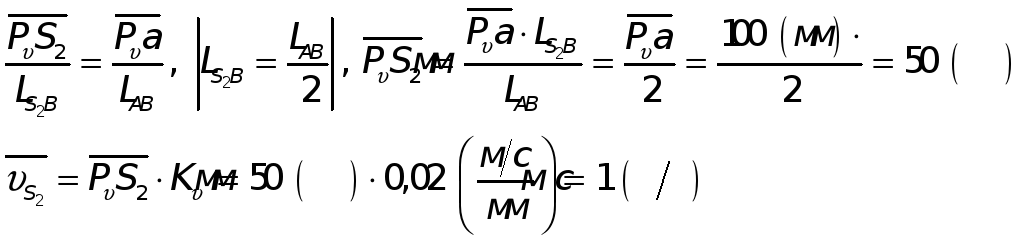
Также находим действительную
скорость
![]() .
.

И ее длину на плане скоростей плане скоростей.
Определение угловых скоростей
Угловые скорости вращения звеньев определяются на основе построенного плана скоростей. Модуль угловой скорости второго звена можно найти по формуле.
![]()
Для определения направления
![]() необходимо мысленно перенести вектор
относительной скорости
необходимо мысленно перенести вектор
относительной скорости
![]() в точку B
механизма. Направление вектора скорости
в точку B
механизма. Направление вектора скорости
![]() указывает, что точка B
относительно точки A
вращается по часовой стрелке. Звено 3
модуля и направления угловой скорости
не имеет, так как оно совершает
возвратно-поступательное движение.
Направление угловых скоростей показываем
на схеме механизма круговыми стрелками.
указывает, что точка B
относительно точки A
вращается по часовой стрелке. Звено 3
модуля и направления угловой скорости
не имеет, так как оно совершает
возвратно-поступательное движение.
Направление угловых скоростей показываем
на схеме механизма круговыми стрелками.
График ускорений
Определение ускорений точек звеньев механизма выполняется в той же последовательности, что и определение скоростей.
Свойства планов ускорений одинаковы, что и у планов скоростей
-
Векторы, исходящие из полюса отображают абсолютные ускорения соответствующих точек в масштабе плана ускорений. Точки плана ускорений соответствующие точкам ускорения, которых равно нулю, располагаются в полюсе
-
Векторы, соединяющие концы векторов абсолютных ускорений, выражают полное относительное ускорение в масштабе плана ускорений
Первой точкой, ускорение которой надо определить, является точка A ведущего звена 1. При вращательном движении звена ускорение любой точки можно представить в виде векторной суммы двух составляющих нормальной и тангенциальной. Поэтому для определения ускорения точки A напишем.
![]()
![]() ,
так как звено 1 вращается с постоянной
угловой скоростью
,
так как звено 1 вращается с постоянной
угловой скоростью
![]()
Следовательно, в этом
частном случае полное ускорение точки
A
определяется только величиной нормального
ускорения,
![]() которое параллельно звену ОА и направленно
от точки A
к O
(к центру вращения). Тогда сразу построим
его на плане ускорений с учетом масштаба
которое параллельно звену ОА и направленно
от точки A
к O
(к центру вращения). Тогда сразу построим
его на плане ускорений с учетом масштаба
Рассматривая точку B, мы видим, что она принадлежит одновременно двум звеньям 2 и 3. Как и на плане скоростей, ускорение точки B определим графо-аналитическим методом.
Затем, полное ускорение звено AB.

По условию подобия и тем же графо-аналитическим методом найдем ускорение точки C.

Затем полное ускорение звена АС найдем из масштаба

Ускорение точки
![]() находится также.
находится также.

Угловые ускорения
Угловое ускорение ведущего звена:
![]() ,
так кок звено вращается с постоянной
угловой скоростью.
,
так кок звено вращается с постоянной
угловой скоростью.
Угловое ускорение звена 2 определим:
Для определения углового
ускорения
![]() ,
необходимо вектор тангенциальной
составляющей ускорения
,
необходимо вектор тангенциальной
составляющей ускорения
![]() мысленно перенести в точку B
механизма. Направление этого вектора
указывает направления углового ускорения
звена 2 против часовой стрелки. Направления
угловых ускорений для всех звеньев
механизма указывается на схеме механизма
круговыми стрелками.
мысленно перенести в точку B
механизма. Направление этого вектора
указывает направления углового ускорения
звена 2 против часовой стрелки. Направления
угловых ускорений для всех звеньев
механизма указывается на схеме механизма
круговыми стрелками.