

Урок № 35
Тема 2.11 Типичные схемы подключения двоичных датчиков
2.11.1 Виды контактов двоичных датчиков
2.11.2 Схемы подключения контактов датчиков
2.11.3 Примеры программ опроса датчиков
2.11.1 Виды контактов двоичных датчиков
Двоичными называются датчики, имеющие два состояния «включено», «выключено». Для описания состояния таких датчиков достаточно двух цифр: 0 и 1.
Наиболее распространенными двоичными датчиками являются электроконтактные датчики положения объектов управления.

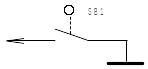
Рисунок 1 – Концевые выключатели
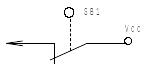
Основным элементом электроконтактного датчика является электрический контакт, механически связанный с упором. На рисунках 1 и 2 упор изображен в виде кружочка, механическая связь с контактом показана пуктиром. Существуют датчики как с контактом на замыкание (рисунок 2), так и с контактом на размыкание (рисунок 3). При воздействии объекта на упор контакт замыкается (рисунок 2) или размыкается (рисунок 3). Электрический контакт коммутирует цепь, в которую включен датчик, на «плюс» источника питания (рисунки 2а, 3а) или на корпус (рисунки 2б, 3б).
![]()
а) б)
Рисунок 2 - Датчики с контактом на замыкание
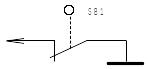
а) б)
Рисунок 3 - Датчики с контактом на размыкание
2.11.2 Схемы подключения контактов датчиков
В схеме, изображенной на рисунке 4, ко входу PA.1 электрический контакт – это может быть контакт датчика, кнопки или тумблера. В исходном состоянии контакт разомкнут, и на входе PA.1 присутствует потенциал лог.1: в схеме 4а) он подается от источника питания через внешний резистор R1, в схеме 4б) подается «плюс» источника питания от внутреннего подтягивающего резистора. При замыкании контакта напряжение на входе падает до нуля. Таким образом, если контакт SB1 разомкнут, на входе PA.1 присутствует лог.1, замкнут – лог.0.

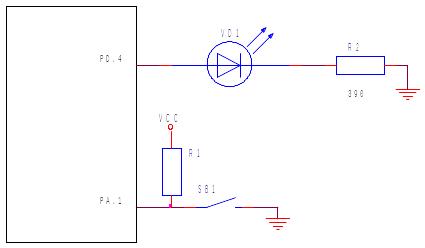
а) б)
Рисунок 4 – Схемы подключения контакта
Схема подключения контакта очень проста. Сложнее определить с помощью программы, записанной в микроконтроллер, состояние контакта. Самый простой способ – это постоянно опрашивать вход порта, к которому подключен контакт. Если на входе присутствует 1, значит, контакт не замкнут. Как только на вход проступит лог.0 опрос датчика прекращается и выполняется требуемое действие.
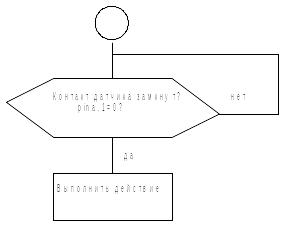
Рисунок 5 – Алгоритм опроса контакта
Урок № 36
2.11.3 Примеры программ опроса датчиков
Программа «opros_1.asm»
Постановка задачи: требуется опросить нормально открытый контакт (рисунок 4а), подключенный к 1-му разряду порта А и выполнить следующее действие: включить светодиод, подключенный к выходу PD.4, если контакт замкнут или ждать, пока контакт замкнется.
;============== opros_1.asm==============
cbi ddra,1 ;настроить на ввод линию PA.1
sbi ddrd,4 ;настроить на вывод линию PD.4
opros:
sbic pina,1 ;пропустить следующую команду, ;если контакт замкнут
rjmp opros ;прыжок на метку opros, если кон- ;такт разомкнут
sbi portd,4 ;установить лог.1 на выходе PD.0
Схема на рисунке 4б отличается тем, что в ней используется внутренний подтягивающий резистор порта. Чтобы подключить внутренний подтягивающий резистор порта, необходимо настроить линию на ввод, но записать в регистр вывода 1.
;============== opros_1.asm==============
cbi ddra,1 ;настроить линию PA.1 на ввод с включением
sbi porta,1 ;подтягивающего резистора
sbi ddrd,4 ;настроить на вывод линию PD.4
opros:
sbic pina,1 ;пропустить следующую команду, ;если контакт замкнут
rjmp opros ;прыжок на метку opros, если кон- ;такт разомкнут
sbi portd,4 ;установить лог.1 на выходе PD.0
Контрольные вопросы
1 Почему датчики называются двоичными?
2 Как подключить контакт двоичного датчика ко входу МК?
3 Как определяется момент замыкания контакта датчика?
4 Составить фрагмент программы, выполняющий следующие действия: включить светодиод (рисунок 6), если контакт SB2 замкнут и выключить, если он разомкнут.
5 Составить фрагмент программы, выполняющий следующие действия: включить светодиод (рисунок 6), при первом замыкании контакта SB2 и выключить при втором замыкании контакта SB2.
Рекомендуемая литература:
Голубцов М.С., А.В. Киреченкова. Микроконтроллеры АVR : от простого к сложному. Изд. 2-е, испр. и доп.. М.: СОЛОН-Пресс, 2005. 304 с. с.164