

Урок №32
2.10.3 Динамическая индикация
Динамическая индикация – это метод отображения целостной картины через быстрое последовательное отображение ее отдельных элементов. «Целостность» восприятия получается благодаря инерционности человеческого зрения: глаз перестает замечать мерцание светящейся точки, начиная с частоты 30 Гц.
Например, если в схеме, изображенной на рисунке 4, использовать импульсное включение- выключение индикаторов с частотой 50Гц, глаз не будет замечать мерцаний, и изображение будет казаться статическим.

Рисунок 4 – Схема динамической индикации
Динамическая индикация используется для уменьшения потребляемой мощности и для подключения к одному порту нескольких индикаторов.
На рисунке 5 изображена более сложная схема посегментной динамической индикации: все сегменты подключены к одной линии РА.3. Коммутацию сегментов выполняет дешифратор DD2. Для подключения индикатора используется всего 4 вывода. Эта схема позволяет включать индикацию в фоновом режиме.

Рисунок 5 – Схема посегментной динамической индикации
На рисунке 6 приведена схема динамической индикации для лабораторного стенда «Микроконтроллеры и автоматизация».
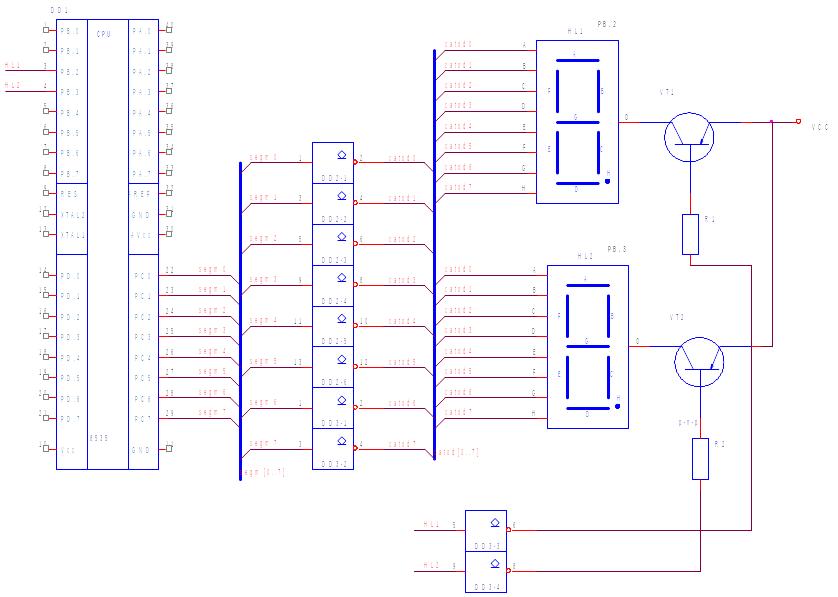
Рисунок 6 – Схема динамической индикации для стенда «Микроконтроллеры и автоматизация»
В схеме используются два индикатора с общим анодом, которые подключены к одному порту PC(0-7). Аноды индикаторов подключены к положительному полюсу источника питания через транзисторные ключи VT1, VT2. Ключами управляют сигналы с выходов PB.2 (HL1), PB.3 (HL2): лог.0 открывает ключ, лог.1 - закрывает. В таблице 3 перечислены режимы работы индикаторов в зависимости от состояния сигналов на выходах PB.2, PB.3.
Таблица 3 - Режимы работы индикаторов HL1,HL2
PB.2(HL1) |
PB.3(HL2) |
HL1 |
HL2 |
|
0 |
0 |
Выкл. |
Выкл. |
Оба индикатора выкл. |
1 |
0 |
Вкл. |
Выкл. |
Включен HL1 |
0 |
1 |
Выкл. |
Вкл. |
Включен HL2 |
1 |
1 |
Вкл. |
Вкл. |
Оба индикатора вкл. |
Если переключать индикаторы с частотой примерно 30-40Гц, будет казаться, что включены одновременно два индикатора.
Алгоритм динамической индикации приведен на рисунке 7.
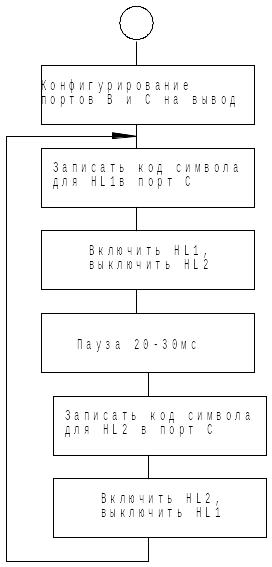
Рисунок 7 - Алгоритм динамической индикации
Контрольные вопросы
1 Что такое статическая индикация?
2 Что такое динамическая индикация?
3 В чем особенность посегментной динамической индикации?
4 Объясните принцип работы схем динамической индикации, изображенных на рисунках 4-6
5 Проведите анализ работы схемы, изображенной на рисунке 6 при следующей комбинации сигналов на выходах микроконтроллера:
Вариант |
PB.3 |
PB.2 |
PC.7 |
PC.6 |
PC.5 |
PC.4 |
PC.3 |
PC.2 |
PC.1 |
PC.0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
2 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
3 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |