

7.3. Примеры моделирования |
368 |
|
|
|
|
линий; в особенности неудобно то, что здесь не предусмотрены средства вывода текстовой информации на поле графика, что делает графическое представление безадресным.
Последний недостаток существенен. Он может быть устранен существующими в пакете SIMULINK средствами. Например, можно записать полученные значения исходных величин в MAT-файл (посылая их на блок To File), а потом создать и использовать программу, которая бы осуществляла считывание данных, записанных в МАТ-файле, и формирование на этой основе графического изображения в окне фигуры по образцу, приведенному в разделах 2.5 и 2.7. Такой путь использован в следующем примере. Неудобством применения обзорного окна XY Graph является также то, что предварительно нужно установить диапазоны изменения обеих входных величин по осям графика. Если эти диапазоны установлены неверно, в обзорном окне может вообще не возникнуть изображение графика, или появится такой его фрагмент, по которому невозможно сделать правильный вывод о поведении исследуемой системы. А при исследовании системы часто невозможно заранее предусмотреть диапазоны изменений величин, или сделать это слишком сложно.
7.3.2. Моделирование поведения гироскопа в кардановом подвесе
Уравнения движения гироскопа в кардановом подвесе на неподвижном основании представим в виде (см. Задача 2.19, раздел 2.6)
|
+ J2 cos |
2 |
&& |
|
& & |
|
|
& |
|
|
||
(J1 |
|
β)α −2J |
2αβsin |
βcos β + Hβ cos β = |
|
|||||||
|
& |
0 + Nm sin(ωt +εN ) −[R0 + Rm sin(ωt +εR )]sin β, |
||||||||||
= − f2α + N |
||||||||||||
|
&& |
|
|
|
|
|
|
|
|
& |
+ L0 |
+ |
J3 β + J2αsin βcos β − Hα cos β = − f2 β |
||||||||||||
|
|
|
& |
|
|
|
& |
|
|
|
|
|
+ Lm sin(ωt +εL ), |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
dH |
= R |
+ R |
sin(ωt +ε |
|
), |
|
|
|
|
|
|
|
|
R |
|
|
|||||
|
|
|
dt |
0 |
m |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
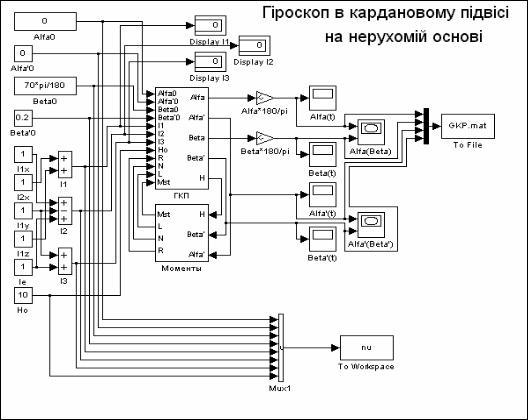
Воплощение этой системы уравнений в блок-схему S-модели показано на |
||||||||||||
рис. 7.79...7.82. |
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 7.79 |
представляет основную модель. |
|
|
|||||||||
Основная S-модель содержит в себе такие основные компоненты:
блоки задания исходных данных; это совокупность блоков типа Constant, определяет значения постоянных величин, входящих в уравнения гироскопа:
две основных подсистемы (построенные на основе стандартных блоков
Subsystem): ГКП и Моменты;
ряд блоков построения графических изображений исходных процессов; среди них 4 блока типа Scope и два блока типа XYGraph; назначение каждого из них становится понятным из рассмотрения блок-схемы;
7.3. Примеры моделирования |
369 |
|
|
|
|
блок типа To File, записывающий полученные вычисленные значения углов α и β , а также угловых скоростей гироскопа α& и β& и модельного времени t в файл GKP. mat.
Рис. 7.79
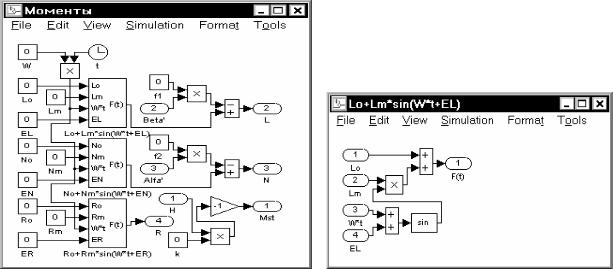
Схема подсистемы ГКП представлена на следующем рисунке (7.80). Подсистема осуществляет численное интегрирование исходной системы
дифференциальных уравнений. Здесь размещены 5 интеграторов (так как принятая система дифференциальных уравнений имеет пятый порядок). Входы с 1 по 8, 12 и 13 представляют величины, которые не изменяются в процессе моделирования. Входы же из 9 по 11 являются моментами сил, действующие по осям подвеса гироскопа, значения которых формируются в подсистеме Моменты. Число выходов в этой подсистеме - 5. Сюда входят два угла поворота гироскопа, две их производные по времени и текущее значение собственного кинетического момента гироскопа.
Подсистема Моменты (рис. 7.81) использует данные об угловых скоростях поворота гироскопа и текущее значение кинетического момента для формирования величин моментов сил сопротивления (трения) по осям подвеса. Блок Моменты имеет 3 входа. Кроме этого, внутри подсистемы осуществляется установка 13 постоянных параметров, которые определяют коэффициенты трения по осям и параметры гармонических колебаний моментов. Выходами подсистемы являются текущие значения моментов сил по каждой из трех осей карданового подвеса. Формирование составляющих моментов сил, изменяющихся
7.3. Примеры моделирования |
370 |
|
|
|
|
гармонически, происходит по однотипному правилу, воплощенному в трех полностью аналогичных под-подсистемах, одна из которых представлена на рис. 7.82.
Рис. 7.80
Как вытекает из схемы черт. 7.79, на вход конечного файла GKP. mat подаются 4 величины: первая сверху - α , вторая - β , третья - угловая скорость
гироскопа α& и четвертая - β&. Это значит, что в файл с указанным именем будет
записываться матрица, состоящая из 5 строк. В первую строку будет записан массив значений модельного времени, для которых вычислены значения выходных (относительно S-модели) величин. В остальные строки будут записаны значения величин, являющихся входами блока То File, причем сверху вниз в порядке расположения самих входов этого блока.
7.3. Примеры моделирования |
372 |
|
|
|
|
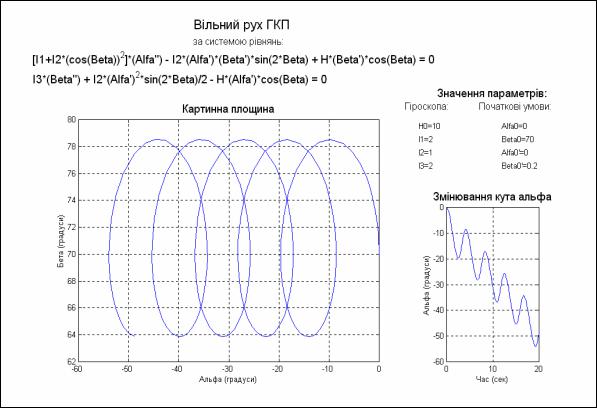
plot(Alfa,Beta);grid;
title('Картинная плоскость','FontSize',14); xlabel('Альфа (градусы)','FontSize',10); ylabel('Бета (градусы)','FontSize',10);
Рис. 7.83
%Оформление текстового подокна "Модель"
subplot(4,4,1:4);
axis('off');
h1=text(0.25,1.1,'Свободное движение ГКП','FontSize',16); h1=text(0.25,0.85,'по системе уравнений:','Fontsize',12); h1=text(-0.1,0.6,'[I1+I2*(cos(Beta))2]*(Alfa'''') - I2*(Alfa'')*(Beta'')*sin(2*Beta) +
H*(Beta'')*cos(Beta) = 0','Fontsize',14);
h1=text(-0.1,0.3,'I3*(Beta'''') + I2*(Alfa'')2*sin(2*Beta)/2 - H*(Alfa'')*cos(Beta) = 0','Fontsize',14);
%Оформление текстового подокна "Параметры"
subplot(4,4,8);
axis('off');
h1=text(-0.1,1.4,'Значения параметров:','Fontsize',14); h1=text(-0.45,1.2,'Гироскопа:','Fontsize',12); h1=text(0.35,1.2,'Начальные условия:','Fontsize',12); h1=text(-0.3,0.9,sprintf('H0=%g',H0),'Fontsize',10); h1=text(-0.3,0.7,sprintf('I1=%g',I1),'Fontsize',10);