

7.3. Примеры моделирования |
363 |
|
|
|
|
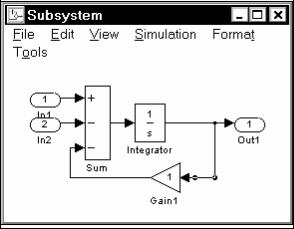
Если раскрыть окно блока Subsystem, дважды щелкнув на нем, то SimuLINK отобразит блок-схему созданной подсистемы (рис. 7.74). Как видно, SimuLINK прибавил блоки In и Out для отображения входов и выходов в систему высшего уровня.
Рис. 7.74
7.2.6. Запись и распечатка блок-схемы S-модели
Для записи модели (блок схемы) на диск нужно выполнить команду Save или Save As в меню File окна модели. При этом SimuLINK записывает в указанную директорию файл с указанным (введенным из клавиатуры) именем, присваивая нему расширение MDL.
Чтобы распечатать модель (блок-схему) на принтере, достаточно воспользоваться командой Print из меню File окна модели.
Довольно интересной является возможность "распечатать" блок-схему в документе любого текстового редактора, например, Word. Для этого следует использовать команду Copy Model из меню Edit окна модели, которая запоминает в буфере содержимое окна модели. Если после этого войти в окно текстового редактора и нажать клавиши <Shift>+<Insert>, в открытом документе редактора возникнет изображение блок-схемы модели. Именно таким образом получены рисун-
ки 7.68...7.71.
7.3. Примеры моделирования
7.3.1. Моделирование поведения физического маятника
Рассмотрим ту же задачу моделирования поведения физического маятника при гармонической вибрации точки его опоры.
Пользуясь результатами ранее проведенных (п. 2.6.2) преобразований, исходное уравнение движения маятника примем в такой безразмерной форме
ϕ |
′′ |
′ |
(7.1) |
|
+sinϕ = S(τ,ϕ,ϕ ) , |
где обозначено
7.3. Примеры моделирования |
364 |
|
|
|
|
|
|
′ |
|
ζ ϕ |
′ |
− |
|
|
|
|
|
|
|
S(τ,ϕ,ϕ ) = −2 |
|
|
|
|
|
(7.2 ) |
|||||
|
−[nmx sin(ν τ +εx ) cosϕ + nmy sin(ν τ +εy ) sinϕ], |
|||||||||||
|
|
|||||||||||
причем безразмерные величины ζ |
и ν определяются выражениями: |
|
||||||||||
ζ |
= |
R |
; |
|
|
|
ν = |
ω |
; |
ω0 = |
mgl . |
|
mgl J |
|
|
|
|
|
|||||||
|
2 |
|
|
|
|
|
ω0 |
|
J |
|
||
Исходными (задаваемыми) параметрами для моделирования будем считать:
1)параметры самого маятника; к ним в анализируемом случае относятся только относительный коэффициент затухания ζ ;
2)параметры, характеризующие внешнее ввоздействие; сюда входят:
амплитуды виброперегрузок в вертикальном nmy и горизонтальном nmx направлениях;
относительная (относительно частоты собственных колебаний маятника) частота вибрации точки опоры ν ;
начальные фазы εy и εx вибрации точки опоры; 3) начальные условия движения маятника:
начальное отклонение ϕ от вертикали;
начальная безразмерная угловая скорость маятника ϕ′ = ϕ& /ωo .
К выходным (моделируемым) величинам будем относить текущий угол отклонения маятника от вертикали ϕ(τ) и его безразмерную угловую скорость
ϕ′(τ) .
Запишем уравнение (7.1) несколько в другой форме:
ϕ |
′′ |
′ |
(7.3) |
|
= S(τ,ϕ,ϕ )−sinϕ . |
В основу воплощения этого уравнения в блок-схему положим такую идею:
если сформировать правую часть уравнения по "известным" процессам ϕ(τ) и S(τ,ϕ,ϕ′), то тем самым станет известным угловое ускорение ϕ′′(τ).
Если теперь проинтегрировать ускорение, можно получить угловую скорость
ϕ′(τ). Наконец, проинтегрировав и ее, можно получить закон изменения угла
ϕ(τ) от времени. Последние полученные две величины (процессы) можно отныне
использовать для формирования правой части уравнения (7.3).
Итак, для формирования блок-схемы, осуществляющей численное интегрирование уравнения (7.1), можно поступить так:
в основу блок-схемы положить два последовательно соединенных интегратора (блоки Integrator) с начальными условиями, которые задаются внешне (external); на вход первого интегратора подать угловое
ускорение, а как начальное условие использовать начальное значение угловой скорости ϕ′(0) ; выходом этого блока будет текущая угловая скорость ϕ′(τ) ; эту величину следует подать на вход второго


7.3. Примеры моделирования |
366 |
|
|
|
|
врезультате чего на выходе его образуется вектор из трех элементов nmx , ντ и
εx . Этот вектор подается на вход блока f(u) (рис. 7.75), созданный на основе
стандартного блока Fcn и реализующий такую зависимость: f (u) = u(1) * sin(u(2) + u(3)),
Рис. 7.76
где u(1), u(2), u(3) - элементы вектора u, подаваемого на вход блока. Таких блоков в подсистеме рис. 7.52 два. В первом из них в качестве первого элемента входного вектора используется величина nmx , второго элемента - ντ и третьего
-εx . Во втором первым элементом является nmy , вторым - ντ и третьим -εy .
Отметим также, что при построении блок-схемы подсистемы (см. рис. 7.69) связь подсистемы с основной системой осуществляется через введение в
подсистему стандартных блоков типа In (Вход) и Out (Выход). Все величины, которые формируются в основной модели, а потом должны быть использованы в подмодели, должни "проникать" в подсистему через блоки In, а величины, сформированные в подсистеме и потом используемые в основной системе, должны выходить из подсистемы через блоки Out.
При этом на изображении блока подсистемы в блок-схеме основной модели автоматически появляется изображения такого количества входов, которое совпадает с количеством введенных в подсистеме блоков In, и выходов, равных числу блоков Out, использованных в подсистеме.
7.3. Примеры моделирования |
367 |
|
|
|
|
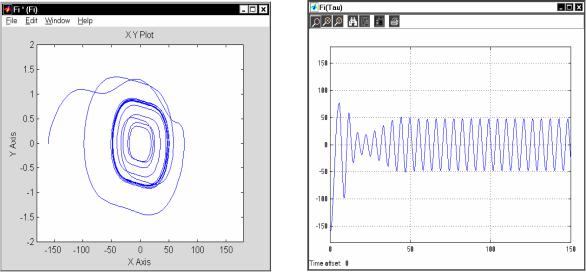
Используя меню Simulation окна главной блок-схемы, а в выпадающем меню, которое возникает при этом, - команду Start, можно активизировать процесс моделирования созданной S-модели маятника. По завершении этого процесса возникнет дополнительное графическое окно, созданное блоком XY Graph (см. рис. 7.77), на котором изображен фазовый портрет маятника при выбранных параметрах маятника и возмущений. Если теперь дважды щелкнуть на изображении блока Scope в блок-схеме маятника, то возникнет еще одно графическое окно (рис. 7.78) с графиком зависимости угла от времени.
|
|
|
Рис. 7.77 |
|
Рис. 7.78 |
Графики, представленные на рис. 7.77 и 7.78, отвечают значениям входных данных, указанным на схеме черт. 7.76, и иллюстрируют возникновение параметрических колебаний при вертикальной вибрации точки подвеса маятника. Изменяя данные настройки входных блоков Constant, можно проводить исследования поведения маятника при произвольных значениях входных параметров.
Из приведенного понятны значительные преимущества и некоторые недостатки моделирования динамических систем с помощью пакета SIMULINK в сравнении с аналогичными исследованиями с помощью программы:
составление блок-схемы уравнений движения вместо набора текста процедуры правых частей значительно более наглядно, позволяет контролировать правильность набора путем осознания физического содержания отдельных блоков и их взаимосвязей;
при проведении самого процесса моделирования в среде SIMULINK исчезает потребность в организации самого процесса численного интегрирования дифференциальных уравнений и даже выведения результатов в графической форме;
однако форма вывода результатов в графической форме в SIMULINK является недостаточно гибкой: нельзя добавить собственные надписи в заголовок и по осям графика, нельзя установить сетку координатных