

Сведения об объекте.

ОУ представляется в виде многомерной системы, которая включает:
![]() – наблюдаемые
входы объекта,
– наблюдаемые
входы объекта,
![]() – ненаблюдаемые
входы объекта,
– ненаблюдаемые
входы объекта,
![]() – выходы
объекта.
– выходы
объекта.
![]() . (1)
. (1)
Для построения модели, как правило, есть 2 вида информации:
Априорная, которая носит качественный характер. Их может характеризовать приблизительное число входов и выходов объекта, характер связи, признаки стохастичности (детерминированности, стохастичности, непрерывности, дискретности), и другие признаки, помогающие сделать представление об объекте.
Измерительная – в результате экспериментов. Включает в себя данные о входах и выходах, измеренных на интервале
 .
Для непрерывных объектов данные входа
представлены в виде n
– реализаций:
.
Для непрерывных объектов данные входа
представлены в виде n
– реализаций:
![]() – входы,
– входы,
![]() –
выходы.
–
выходы.![]()
В
основном измерения осуществляются в
дискретные моменты времени с интервалами
![]() между ними:
между ними:
![]() .
.
Данные
оформляются в виде двумерных массивов
![]()
![]() .
.
 .
(2)
.
(2)
Модель объекта.
Будем считать, что выходы ОУ связаны с его входами некоторым оператором F:
![]()
Задачей
идентификации является подбор или
нахождение некоторого оператора
![]() ,
который бы в некотором смысле был
бы близок к истинному оператору F:
,
который бы в некотором смысле был
бы близок к истинному оператору F:![]() (3)
(3)
Выход
объекта –
![]() ,
выход модели
,
выход модели
![]() :
: ![]()
Аргументом оператора является только наблюдаемые входы.
Если
![]() ,
то реакция модели и объекта на одинаковое
входное воздействие будут приблизительно
одинаковыми. Поэтому для оценки близости
модели и объекта используют
,
то реакция модели и объекта на одинаковое
входное воздействие будут приблизительно
одинаковыми. Поэтому для оценки близости
модели и объекта используют
![]() .
В качестве модели объекта выбирают ту,
которая отвечает некоторым показателям,
которые называются критериями
идентификации (качества).
.
В качестве модели объекта выбирают ту,
которая отвечает некоторым показателям,
которые называются критериями
идентификации (качества).
Критерии идентификации.
Мера
близости модели и объекта определяется
некоторым функционалом ошибки:
![]()
который
зависит от структуры модели![]() вектора параметров.
вектора параметров.
Оценка
модели выполняется на основе минимизации
или снижения до определенного уровня
значения
![]() .
Одним из критерия идентификации является
критерий качества (4):
.
Одним из критерия идентификации является
критерий качества (4):
![]() (4)
(4)
Согласно
которому оператор
можно принять за модель объекта, если
максимальное значение модуля ошибки
идентификации на интервале наблюдений
![]() стремится к минимальной величине.
Критерий (4) используется, если входы и
выход объекта являются детерминированными
функциями(неслучайными). Но, как правило,
входные воздействия являются случайными
сигналами, поэтому используется критерий
(5):
стремится к минимальной величине.
Критерий (4) используется, если входы и
выход объекта являются детерминированными
функциями(неслучайными). Но, как правило,
входные воздействия являются случайными
сигналами, поэтому используется критерий
(5):
![]() (5)
(5)
Выбирается та модель, которая приводит математическое ожидание в минимум. Для практики используется квадратичный критерий качества, значения которых всегда неотрицательны. Для детерминированных сигналов – критерий (6), для аналоговых – критерий (4).
![]() ,
(6)
,
(6)
Для случайных сигналов – критерий (7):
![]() .
(7)
.
(7)
![]() .
(8)
.
(8)
![]()
Критерий (8) используется, если выходы объекта и модели являются непрерывными функциями (функциями с непрерывным временем), если измерение осуществляется дискретно, то используется критерий (9):
![]() (9)
(9)
В случаях 4-9 минимизация осуществляется по оператору . Изменяем структуру и параметры операторов и выбирается с минимальной ошибкой.
Классификация задач идентификации.
По конечному результату:
структурная идентификация (получаем и структуру и параметры модели);
параметрическая идентификация;
При структурной идентификации объем априорной информации об объекте весьма ограничен. Поэтому необходимо решить следующие задачи:
выделение объекта из среды;
задание класса моделей;
определение характера связи между входом и выходом модели объекта;
определение рационального числа информативных переменных (входов и выходов объекта), учитываемых в модели;
определение возможности представления модели с требуемой точностью в классе линейных операторов и другие.
Задачу определения параметров модели по наблюдениям работы объекта при заданной структуре модели называют идентификацией в узком смысле или параметрической идентификацией.
По способу изучения объекта:
активная идентификация – идентификация вне контура управления;

пассивная идентификация – идентификация в контуре управления.
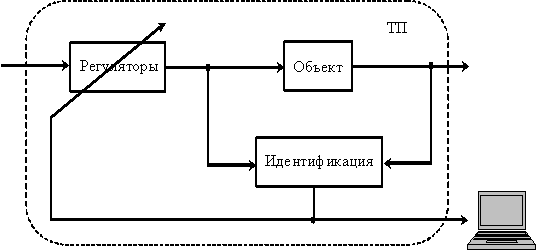
При активной идентификации объект извлекается из контура управления. Исследование проводится вне его рабочего положения. При этом входные воздействия могут быть спланированы таким образом, чтобы затраты, связанные с проведением эксперимента и построения модели, оказывались минимальны.
Пассивная
идентификация осуществляется в контуре
управления при нормальном функционировании
системы. Входные воздействия определяются
режимом работы системы. Адаптивные и
оптимальные системы используют пассивную
идентификацию. При этом доступны для
измерения только входы
![]() и
выходы
и
выходы
![]() объекта.
объекта.
По типу идентифицируемой модели:
линейная и нелинейная идентификация;
детерминированная и стохастическая идентификация;
идентификация с непрерывным и дискретным временем;
стационарная и нестационарная идентификация;
одномерная и многомерная идентификация;
статическая и динамическая;
с сосредоточенными и распределенными параметрами.
Задача технической диагностики – оценка состояния системы в условиях ограниченной информации. Диагностика состоит в обнаружении неисправных элементов системы по результатам измерения параметров.
Проведение технической диагностики связано:
с разработкой диагностических моделей и методов,
разработкой диагностических тестов,
оценкой способности к контролю технических объектов.
Диагностирование:
текущее;
прогнозное;
функциональное;
тестовое;
комбинированное.