

Датчики авионики / ТЕМА 03 / погрешности
.doc
![]()
При измерении некоторой физической величины с помощью измерительного прибора возникает погрешность измерения. Погрешность измерения складывается из методических, динамических и инструментальных погрешностей. Методические погрешности, свойственные приборам, основанным на косвенных мететодах измерения. Динамические погрешности были рассмотрены в гл. III. Данная глава посвящена инструментальным погрешне стям приборов и датчиков.
Определения и классификация инструментальных погрешностей
Инструментальные погрешности приборов и датчиков можно представить в абсолютных или относительных величинах. Абсолютная погрешность, приведенная ко входу прибора или датчика:
![]()
где х – показание прибора (сигнал датчика) в единицах измеряемой величины;
хо – действительное значение измеряемой величины.
Абсолютная погрешность, приведенная к выходу прибора или датчика:
![]()
где у – фактический выходной сигнал;
уо – значение выходного сигнала, отвечающее действительному значению измеряемой величины.
Рассматривая ∆у как дифференциал функции у=ƒ(х), получим связь между абсолютными погрешностями, приведенными ко входу и выходу:
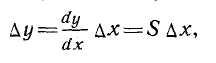
где
S
=
![]() –
чувствительность
прибора
(датчика).
–
чувствительность
прибора
(датчика).
Рис.
4.1. К определению абсолютной погрешности
Относительная погрешность прибора (датчика) равна отношению абсолютной погрешности к текущему значению сигнала:
В приборостроении оценивают точность приборов (датчиков) с помощью приведенной относительной погрешности, равной отношению абсолютной погрешности к абсолютной величине диапазона измерения:
Класс точности прибора равен наибольшему значению приведенной относительной погрешности ζ, выраженному в процентах:
А = ζm·100 %
Инструментальные погрешности можно классифицировать по различным признакам.
1. В зависимости от характера связи между величиной абсолютной погрешности и уровнем сигнала различают аддитивные и мультипликативные погрешности1.
Аддитивные погрешности – это погрешности, абсолютное значение которых, не зависит от уровня сигнала; они возникают в тех случаях, когда под влиянием тех или других факторов статическая характеристика измерительного устройства смещается вверх или вниз на величину ∆yа без изменения наклона (рис. 4.2).
-
Р
Рис.
4.3. К определению
мультипликативной
погрешности:
а
– изменение
наклона характеристики;
б
– график
мультипликативной погрешности
а
–
сдвиг характеристики;
б
– график аддитивной погрешности
Мультипликативные погрешности – это погрешности, величина которых пропорциональна уровню сигнала. Они возникают при изменении наклона статической характеристики; без ее сдвига (рис. 4.3), при этом чувствительность прибора (датчика) изменяется на постоянную величину

Относительное значение мультипликативной погрешности не висит от уровня сигнала:
Погрешность прибора и датчика может содержать как аддитивную, так и мультипликативную составляющие:
∆у = ∆уа + ∆ум. (4.3)
Здесь и в дальнейшем индексом «а» обозначена аддитивная составляющая, индексом «м» — мультипликативная.
В общем случае могут иметь место более сложные виды функциональных связей между погрешностью и полезным сигналом, приводящие к изменению формы характеристики.
2. В зависимости от закономерности появления погрешностей прибора или датчика при его многократном контроле различают систематические и случайные погрешности.
Систематические погрешности имеют определенное значение в каждой точке характеристики прибора (датчика) и повторяются при его многократном контроле в одних и тех же условиях. Случайные погрешности – это погрешности, имеющие рассеяние по величине и по знаку при многократном контроле в одних и тех же условиях, появление тех или иных значений случайных погрешностей при единичных замерах незакономерно. Например, погрешность, возникающая из-за неуравновешенности подвижной системы, является систематической, погрешность, обусловленная влиянием сил трения в опорах, – случайной.
3. В зависимости от причин, порождающих инструментальные погрешности, последние делятся на производственно-технологические, температурные, возникающие от действия вредных сил, от гистерезиса, от упругого последствия и др.
Производственно-технологические погрешности вызываются неточностью выдерживания геометрических размеров деталей, разбросом физических параметров исходных материалов и т. п.; в число производственно-технологических погрешностей входят шкаловые погрешности, обусловленные неточностью регулировки узлов и приборов.
Температурные погрешности обусловлены изменением физических (в том числе геометрических) параметров прибора при изменении температуры окружающей среды.
Погрешности от вредных сил обусловлены действием на чувствительный элемент и подвижную систему прибора сил сухого трения, сил небаланса подвижной системы, сил электромагнитного или электростатического притяжения и т. п.
Погрешности от гистерезиса и упругого последствия вызываются силами внутреннего трения в материале чувствительных и преобразующих элементов.
В технических условиях на приборы и датчики обычно устанавливают отдельно допуски на так называемую основную погрешность и на дополнительные погрешности. Под основной погрешностью понимают погрешность прибора (датчика) при нормальных условиях (при нормальной температуре, нормальном атмосферном давлении, отсутствии вибрации и линейных ускорений) .
Дополнительными погрешностями считают приращения погрешности, возникающие при изменении температуры, атмосферного давления, при воздействии вибрации и линейных ускорений.
РАСЧЕТ ОСНОВНЫХ ВИДОВ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ
1. Расчет производственно-технологических погрешностей
При расчете статических характеристик конкретных приборов (§ 2.5) было установлено, что величина выходного сигнала зависит не только от измеряемой величины х, но и от целого ряда параметров:
у=ƒ(х, q1, q2, . . qп), (4.4)
где q1, q2, . . qп – параметры схемы и конструкции, влияющие на выходной сигнал
К параметрам q1, q2, . . qп относят геометрические размеры деталей и величины, характеризующие физические свойства материалов (модуль упругости, удельное электрическое сопротивление, магнитную проницаемость и др.).
Если параметры q1, q2, . . qп постоянны, то уравнение (4.4), будет однозначно устанавливать зависимость у от х.
При отклонении этих параметров от начальных значений выходной сигнал у при постоянном х получит некоторое приращение:
∆y = ƒ(x, q1 + ∆q1, q2 + ∆q2 … qn + ∆qn) – ƒ(x, q1 , q2 … qn).
Поскольку первичные ошибки ∆q1, ∆q2 , … ∆q2 практически малы по сравнению с параметрами q1, q2, . . qп, то в соответствии с теорией точности механизмов [5] зависимость между приращением сигнала ∆у и первичными ошибками можно приближенно представить в виде полного дифференциала функции (4.4):
∆y
=
![]()
 ,
,
Нулевой индекс у частных производных означает, что они вычисляются для начальных (расчетных) значений q1, q2, . . qп
множитель
![]() представляет
собой коэффициент влияния первичной
ошибки ∆q1
на
ошибку выходного сигнала прибора
(датчика).
представляет
собой коэффициент влияния первичной
ошибки ∆q1
на
ошибку выходного сигнала прибора
(датчика).
Ч астный
случай. Характеристики
многих измерительных систем приводятся
к виду
астный
случай. Характеристики
многих измерительных систем приводятся
к виду

где ki – показатели степени (постоянные числа, положительные или отрицательные, целые или дробные).

Дифференциал г при; x = соnst;

откуда

Следовательно, для приборов и датчиков со статической характеристикой вида (4.5а) относительная погрешность выходного сигнала равна сумме произведений относительных погрешностей параметров на показатели степени этих параметров.
 П
П олученные
формулы применимы как к приборам и
датчикам в целом,
так и к отдельным их элементам. Например,
характеристика
спиральной пружины (см.
табл. 2.2)
приводится
к
виду (4.5а):
олученные
формулы применимы как к приборам и
датчикам в целом,
так и к отдельным их элементам. Например,
характеристика
спиральной пружины (см.
табл. 2.2)
приводится
к
виду (4.5а):
Относительная погрешность пружины, вызванная отклонением параметров l, b, h и Е от расчетных значений, согласно (4.6) будет
2. Температурные погрешности
Выражение (4.5) можно использовать для расчета температурных погрешностей, если считать, что приращения ∆qi параметров qi произошли в результате изменения температуры окружающей среды.
Полагая параметры qi, линейно зависящими от температуры:
![]()
где αi – температурный коэффициент параметра;
qi0 – значение параметра qi при нормальной температуре, получим приращения этих параметров в виде
![]()

Откуда условие температурной компенсации будет

откуда общий температурный коэффициент всего устройства

и условие температурной компенсации

Пример.
Рассматривая электрическую цепь термоэлектрического термометра (см. рис. 2.6) как четырехполюсник, преобразующий электродвижущую силу е в силу тока i, получим статическую характеристику этого звена в виде
Требуется определить условие температурной компенсации, если известно, что температурные коэффициенты рамки r, шунта Rш и добавочного сопротивления RД соответственно равны αr = 0,004, αш = 0,006 и αд = 0.
Решение
Согласно формуле (4.8) условие температурной компенсации применительно к данной электрической цепи будет иметь вид

Производную …. Можно не определять, так как температурный коэффициент αд = 0.
Подставляя (4.13) в (4.12), получим

откуда условие температурной компенсации

или с учетом заданных значений αш и αr

![]()
1 Аддитивные и мультипликативные погрешности рассматриваются здесь применительно к приборам и датчикам, имеющим линейную характеристику, но они имеют место и в приборах и датчиках с нелинейными функциями преобразования.