

Общие принципы построения мпп.
Основу магнитострикционного измерительного преобразователя (МПП) составляет механически плавно регулируемая ультразвуковая линия задержки (УЗЛ) с ферромагнитным проволочным, трубчатым или ленточным волноводом, возбуждение и считывание ультразвуковых импульсов в котором осуществляется магнитострикционным способом.
Главными элементами МПП являются входной и выходной электроакустические преобразователи (ЭАП), связанные общим звукопроводом. Процесс преобразования входного электрического сигнала в ультразвуковой, происходящий во входном ЭАП, основан на прямом магнитострикционном эффекте (механическая деформация ферромагнетика при изменении его намагниченности) — эффекте Джоуля, вторичное преобразование ультразвукового сигнала в электрический в выходном ЭАП основано на обратном магнитострикционном эффекте (изменение намагниченности ферромагнетика при его деформации) — на эффекте Виллари. Информацией о перемещении служит интервал времени распространения ультразвука по звукопроводу между ЭАП :
![]() (1)
(1)
где Х- обобщенное (линейное, угловое) перемещение; р - коэффициент чувствительности, определяемый способом образования временного интервала; V - скорость распространения ультразвуковой волны по звукопроводу.
В зависимости от используемого типа волнового движения возможны МПП на объемных и поверхностных акустических волнах (ПАВ). ПАВ пока не нашли себе широкого применения в МПП, так как ПАВ практически не допускают бесконтактного возбуждения и считывания ультразвуковых колебаний (затухание порядка 80 ДБ), то есть не позволяют построить механически плавно регулируемую линию задержки в большом диапазоне преобразования.
В отличие от ПАВ
возбуждение и считывание объемных волн
возможно при наличии воздушного зазора.
Среди объемных получили наибольшее
распространение продольные волны
благодаря технологичности и простоте
конструкции измерительного преобразователя.
Величина скорости распространения
продольных колебаний
![]() ,
с учетом дисперсии в звукопроводе
круглого сечения равна
,
с учетом дисперсии в звукопроводе
круглого сечения равна
![]() (2)
(2)
где Е - модуль упругости материала звукопровода;
![]() -
удельная плотность материала звукопровода;
-
удельная плотность материала звукопровода;
![]() -
коэффициент Пуассона (для металлов а
-
коэффициент Пуассона (для металлов а
![]() 0,3);
0,3);
![]() -
радиус звукопровода;
-
радиус звукопровода;
![]()
 -
длина продольной звуковой волны, для
которой определяется скорость.
-
длина продольной звуковой волны, для
которой определяется скорость.
Дисперсия скорости
становится заметной, когда длина волны
распространяющихся колебаний равна и
меньше диаметра звукопровода. При малом
его диаметре и низкой для обычных условий
применения МППД рабочей частоте (![]() )
эффект дисперсии скорости незначителен.
Поэтому скорость распространения
продольных волн в звукопроводе может
быть катушке определена, как
)
эффект дисперсии скорости незначителен.
Поэтому скорость распространения
продольных волн в звукопроводе может
быть катушке определена, как![]() .
.
В последнее время
в МПП стали широко использоваться также
и крутильные волны. В отличие от
продольных, крутильные колебания
распространяются по звукопроводу без
дисперсии со скоростью
![]() ,гдеG
- модуль сдвига.
,гдеG
- модуль сдвига.
Классификация магнитострикционных преобразователей перемещений.
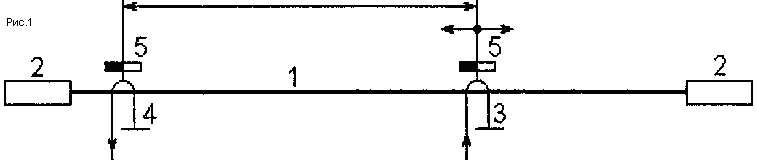
Базовая конструкция МПП на продольных волнах показана на рисунке 1. Первичный преобразователь содержит звукопровод 1, концы которого помещены в демпферы 2, входной ЭАП катушкой возбуждения 3, выходной ЭАП с катушкой считывания 4 и постоянным магнитом 5. Выходной ЭАП сделан неподвижным, а входной подвижным и кинематически связанным с объектом управления или контроля.
При подаче
импульса тока возбуждения в катушку 3
на участке звукопровода 1 под катушкой
вследствие эффекта Джоуля возбуждается
продольная ультразвуковая волна,
распространяющаяся в обе стороны по
звукопроводу. Волна, распространяющаяся
вправо, затухает в демпфере 2. Волна,
распространяющаяся влево, вследствие
эффекта Виллари, наводит э.д.с. в катушке
считывания 4 выходного ЭАП через время
![]() ,
пропорциональное перемещению
,
пропорциональное перемещению![]() .
Распространяясь далее, волна
поглощается демпфером 2. Уравнение
преобразования описывается выражением
(1), где значение коэффициента р = 1.
.
Распространяясь далее, волна
поглощается демпфером 2. Уравнение
преобразования описывается выражением
(1), где значение коэффициента р = 1.
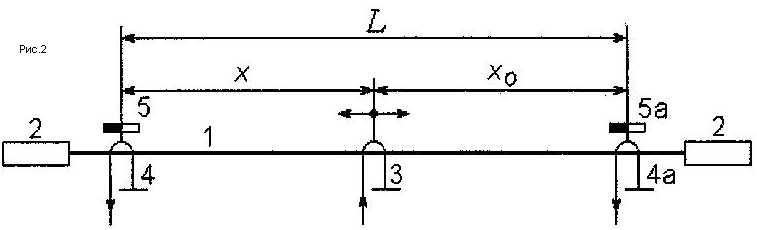
Установка на звукопровод дополнительного выходного ЭАП с катушкой 4а считывания (рис.2) позволяет сформировать дополнительный опорный интервал времени и реализовать алгоритм логометрического или дифференциального преобразования, исключить из уравнения преобразования скорость V ультразвуковых колебаний, подверженную воздействию дестабилизирующих факторов и, тем самым, повысить точность преобразования.
Высокая скорость ультразвука в металле (около 5000 м/сек.) обуславливает весьма высокое быстродействие МПП, но малую крутизну его статической характеристики.
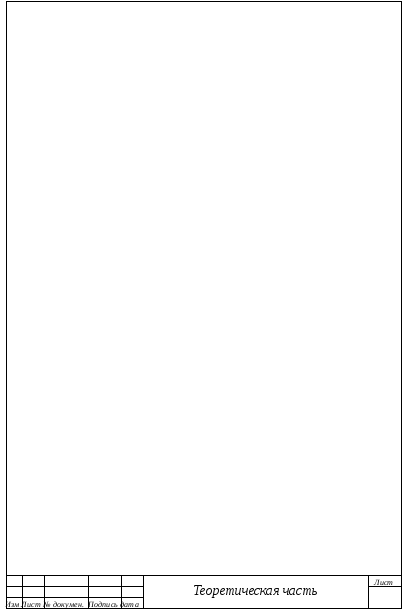
Эффективным приёмом повышения чувствительности является использование принципа отражения от недемпфированного конца звукопровода (рис.3).
Информацией о
перемещении служит время распространения
прямого и отраженного ультразвуковых
импульсов от катушки считывания до
недемпфированного конца звукопровода.
При этом коэффициент чувствительности
в выражении (1)![]() .
Реализация уравнения логометрического
преобразования МПП возможно без установки
дополнительных элементов. К тому же
разработка новых типов подвижных
элементов (звукопровода, ролика, магнита)
повышает надежность МПП и расширяет
его функциональные возможности.
.
Реализация уравнения логометрического
преобразования МПП возможно без установки
дополнительных элементов. К тому же
разработка новых типов подвижных
элементов (звукопровода, ролика, магнита)
повышает надежность МПП и расширяет
его функциональные возможности.
Базовая конструкция
МПП на крутильных волнах представлена
на рис.4. Подвижным элементом МПП этого
типа является постоянный магнит 6, а
импульс тока возбуждения подается
непосредственно в звукопровод. Вокруг
звукопровода образуется круговое
магнитное, поле, которое взаимодействует
с продольным магнитным полем постоянного
магнита. В результате этого, магнитное
поле в зоне взаимодействия изменяется
скачком и, вследствие прямого
магнитострикционного эффекта (эффекта
Видемана), в звукопроводе возникает
крутильная ультразвуковая волна,
распространяющаяся по звукопроводу.
Дойдя до зоны считывания,
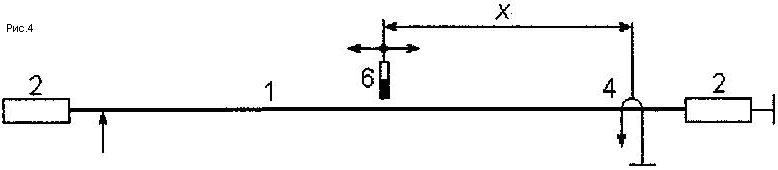 у
у льтразвуковой
импульс преобразовывается в электрический,
и на выходе МПП формируется временно
интервал, пропорциональный перемещению.
льтразвуковой
импульс преобразовывается в электрический,
и на выходе МПП формируется временно
интервал, пропорциональный перемещению.
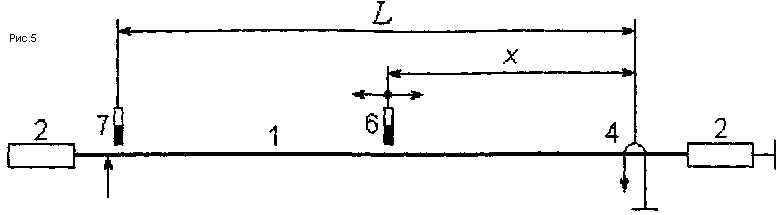
Установка в конце диапазона преобразования дополнительного неподвижного постоянной магнита 7 (рис.5) позволяет сформировать дополнительный опорный интервал времени и реализовать уравнение логометрического и дифференциального преобразования.
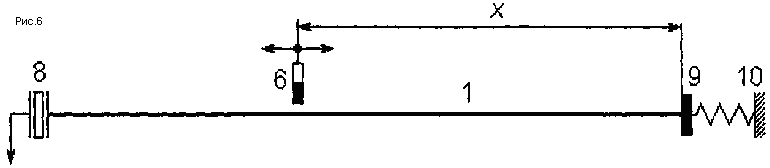
Возбуждение и считывание упругих колебаний в магнитострикционном волноводе возможно также с помощью пьезоэлемента (рис.6 ). Пьезоэлемент 8 возбуждает упругие колебания распространяющиеся по звукопроводу, и преобразовывает в электрический сигнал упругие колебания, отраженные от постоянного магнита 6 и жесткого заземления 9 конца звукопровод 8. Конструкция позволяет реализовать все преимущества МПП на отраженных волнах, в том числе реализацию уравнения логометрического и дифференциального преобразования без установки дополнительных элементов.
Звукопроводы всех конструкций снабжены натяжным устройством. Примером может служить пружина 10.
М етоды
формирования временных интервалов.
етоды
формирования временных интервалов.
Базовой конструкцией формирователя сигналов считывания в МПЛП является пороговый преобразовать (амплитудный или пороговый дискриминатор) на базе операционного усилителя (ОУ). Основной трудностью при его проектировании является обеспечение требуемого уровня помехозащищенности при изменении амплитуды сигнала считывания в рабочем диапазоне температур.
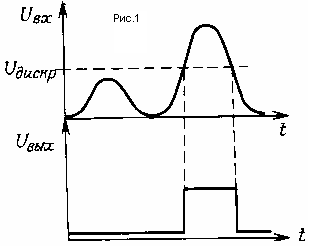
Амплитудный дискриминатор (в простейшем случае - компаратор) – это прибор, который контролирует уровень входного линейного сигнала и при превышении определенного заданного порога выдает логический импульс (рис.1).
При использовании амплитудных дискриминаторов в МПЛП основным требованием к ним является не точность и стабильность порога, а точность временной привязки выходного импульса по отношению к вызвавшему его событию (приход ультразвуковой волны к ЭАП) и независимость от амплитуды и времени нарастания исходного сигнала. Амплитудные дискриминаторы, удовлетворяющие данным условиям, называются времязадающими.
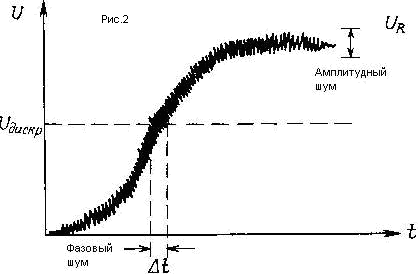
К одним из важных параметров времязадающих дискриминаторов относится временной разброс, который характеризуется статическим распределением положения выходного сигнала относительно истинного (рис.2). Разброс по времени происходит, если входной сигнал обладает конечной длительностью переднего фронта и имеет место разброс по амплитуде (амплитудный шум). Аналогичный эффект возникает если амплитудный шум воздействует на порог компаратора.
Другим важным параметров влияющим на точность временной привязки является конечное время нарастания (переднего фронта) импульса (рис.3). Когда входной сигнал имеет конечное время нарастания, а порог амплитудного дискриминатора фиксирован, то компаратор срабатывает тем позже, чем выше установлен порог.

В зависимости от обеспечения того или иного уровня помехозащищенности используют разные методы временной привязки. Рассмотрим некоторые из них.
Привязка по переднему фронту. Дискриминаторы работающие по этому принципу называются дискриминаторами с привязкой по переднему фронту. Такие дискриминаторы срабатывают, когда входной сигнал достигает определенного (фиксированного) порога. Принципиальным недостатком такого вида дискриминаторов является зависимость времени привязки от превышения над порогом (амплитуды входного сигнала) и времени нарастания импульса (рис.3).
 Для нормальной
работы таких дискриминаторов входной
импульс должен иметь постоянную амплитуду
и как можно меньшее время переднего
фронта (нарастания).
Для нормальной
работы таких дискриминаторов входной
импульс должен иметь постоянную амплитуду
и как можно меньшее время переднего
фронта (нарастания).
Привязка к точке смены полярности сигнала. Такие дискриминаторы называют детекторами нуля. Преимуществом детекторов нуля является возможность получения времязадающего импульса, положение которого не зависит от амплитуды входного сигнала. Недостатком является то, что входные импульсы должны иметь постоянное время нарастания (длительность переднего фронта).
При выполнении условия постоянности времени нарастания и дважды дифференцированного входного сигнала получают времязадающий импульс.

На входе детектора нуля установлен высокочувствительный усилитель с симметричным ограничением (компаратор с нулевым порогом). После прохождения усилителя-ограничителя сигнал имеет прямоугольную форму с крутыми фронтами. Далее этот сигнал дифференцируется, при этом получается короткий отрицательный импульс, который соответствует моменту смены полярности сигнала исходного импульса (переходу через нуль). Передний фронт импульса используется для запуска одновибратора, который формирует выходной импульс.
Д искриминатор
с порогом, пропорциональным амплитуде.Этот метод
применяется для подавления амплитудной
зависимости (рис.3) и предполагает
постоянство времени нарастания входных
импульсов. Суть метода состоит в том,
чтобы заставить срабатывать дискриминатор
не при заданном (постоянном пороге), а
при достижении входным сигналом заданной
доли от его амплитуды.
искриминатор
с порогом, пропорциональным амплитуде.Этот метод
применяется для подавления амплитудной
зависимости (рис.3) и предполагает
постоянство времени нарастания входных
импульсов. Суть метода состоит в том,
чтобы заставить срабатывать дискриминатор
не при заданном (постоянном пороге), а
при достижении входным сигналом заданной
доли от его амплитуды.
Для реализации этого метода входной сигнал разветвляется на два направления (рис.5).

В первой ветви сигнал ослабляется в число раз, равное отношению амплитуды к порогу, и инвертируется. Во второй ветви исходный импульс задерживается так, чтобы максимум ослабленного, инвертированного сигнала совпал по времени с моментом достижения задержанным импульсом уровня порога срабатывания (т.е. задержка происходит на время, отвечающее заданной доле от входной амплитуды). В результате сложения этих двух сигналов получается биполярный импульс, смена полярности которого совпадает с моментом достижения входным сигналом уровня, соответствующего выбранной доле от амплитуды. Для фиксации момента смены полярности используют детектор нуля.
В связи с затуханием и дисперсией сигнала в звукопроводе МПЛП его амплитуда и форма (в частности время нарастания) претерпевают изменения, что сказывается на качестве временной привязки. При этом с достаточной степенью точности можно считать, что вершина импульса (экстремум) сохраняет своё относительное положение постоянным. Поэтому в МПЛП для обеспечения высокого качества фиксации времени (временно привязки) между импульсами целесообразно обеспечить срабатывание электроники по экстремуму сигнала (импульса) считывания.