

Лабораторная работа №2 / попытка сделать ЛР2
.docСанкт-Петербургский Государственный Электротехнический Университет
«ЛЭТИ»
Кафедра АПУ
ОТЧЕТ
по лабораторной работе №2
«Система регулирования скорости вращения двигателя постоянного тока с подчиненным токовым контуром»
Выполнил:
Студент группы 4322
Факультет КТИ
Хомченовский Петр
Проверил:
Соловьев Н.В.
СПб 2006
Цель работы:
-
Ознакомление с функциональными элементами системы подчиненного регулирования скорости.
-
Расчет частотных характеристик регуляторов системы подчиненного регулирования.
-
Расчет частотных характеристик входного звена.
-
Экспериментальное определение частотных характеристик указанных выше звеньев.
-
Сравнение результатов расчета и эксперимента.
-
Экспериментальное определение постоянной времени усилителя постоянного тока (УПТ)
1) Структурная схема системы регулирования скорости вращения двигателя постоянного тока с подчиненным токовым контуром представлена на рисунке 1.
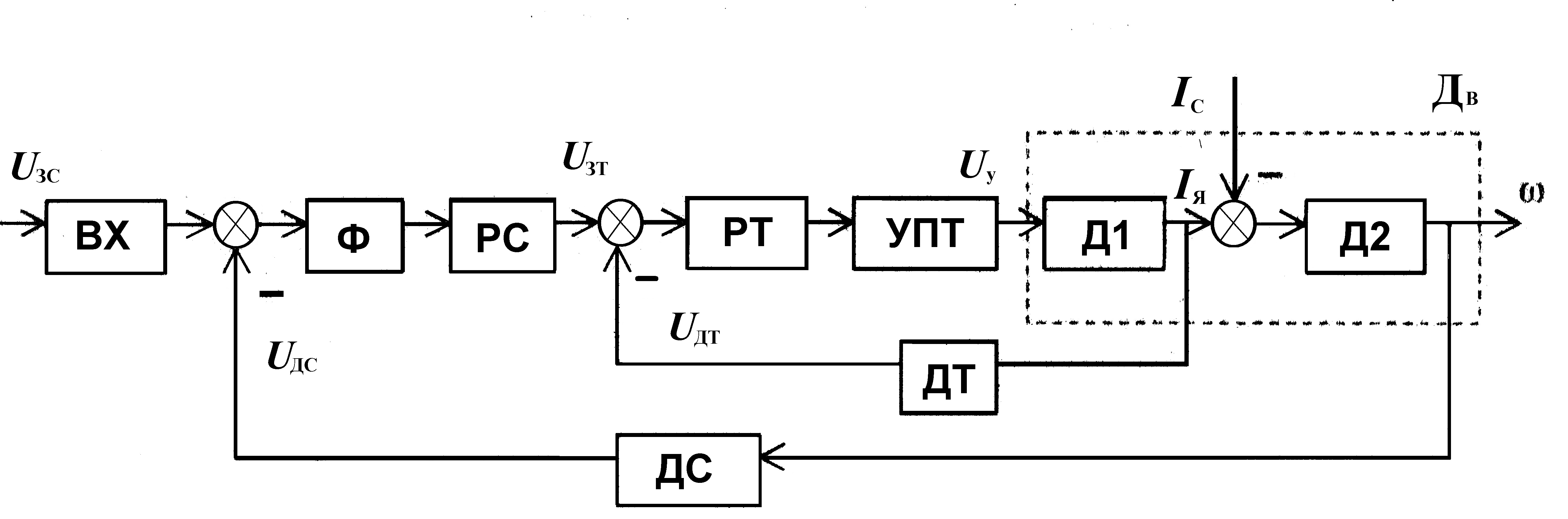
Рис. 1. Структурная схема системы
На рисунке 1:
Дв – двигатель постоянного тока независимого возбуждения, скорость которого необходимо регулировать;
Д1 – часть двигателя, входящая в контур тока;
Д2 – часть двигателя, входящая в контур скорости;
УПТ – усилитель постоянного тока, питающий якорную цепь двигателя;
РТ – регулятор тока;
РС – регулятор скорости;
ДТ – датчик тока;
ДС – датчик скорости;
Ф – фильтр;
ВХ – входное звено.
Представим схему на рисунке 1 так, как представлено на рисунке 2:

Рис.2. Структура системы
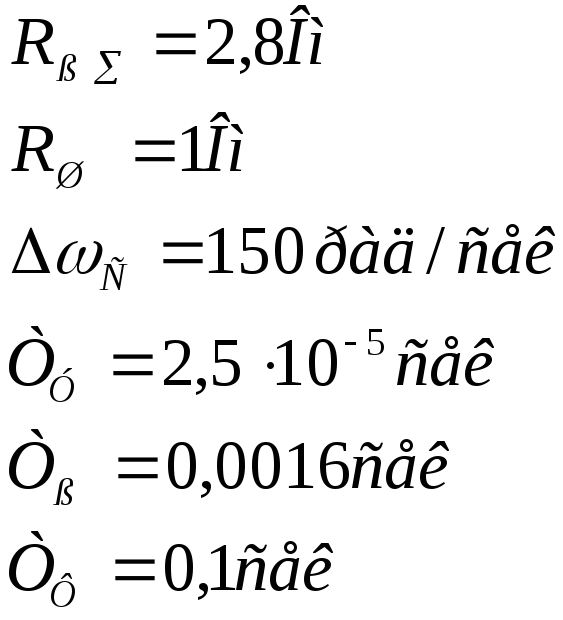
Запишем передаточные функции всех элементов системы:
![]()
![]() ,
,
![]() - требуется определить в результате
расчета
- требуется определить в результате
расчета
![]() ,
,
![]() - коэффициент передачи обратной связи
по току
- коэффициент передачи обратной связи
по току
![]() - коэффициент передачи обратной связи
по скорости
- коэффициент передачи обратной связи
по скорости
 - для случая, не учитывающего
ОС по ЭДС, т.е.
- для случая, не учитывающего
ОС по ЭДС, т.е.
![]() или
или
 с учетом влияния ОС по ЭДС.
с учетом влияния ОС по ЭДС.
![]()
![]() ,
где
,
где
![]() - сопротивление ОС по току.
- сопротивление ОС по току.
2) Расчет контура тока
Расчет начинается с внутреннего
контура – контура тока. В качестве
некомпенсируемой части объекта
применяется входящая в него передаточная
функция двигателя
![]() .
Некомпенсируемым звеном является
усилитель, постоянную времени которого
принимаем за малую постоянную времени
контура тока, т.е.
.
Некомпенсируемым звеном является
усилитель, постоянную времени которого
принимаем за малую постоянную времени
контура тока, т.е.
![]() ,
где
,
где
![]() - малая некомпенсируемая постоянная
времени контура тока. Необходимо
определить ПФ регулятора тока из условия
получения передаточной функции
разомкнутого контура тока в виде
однократно интегрирующей системы, т.е.:
- малая некомпенсируемая постоянная
времени контура тока. Необходимо
определить ПФ регулятора тока из условия
получения передаточной функции
разомкнутого контура тока в виде
однократно интегрирующей системы, т.е.:
![]() ,
где
,
где
![]() - параметр, определяемый настройкой
регулятора.
- параметр, определяемый настройкой
регулятора.
Для замкнутого контура тока:
 , где:
, где:
![]()
![]() ,
,
При
![]() ,
т.е. при
,
т.е. при
![]() имеем предельный случай апериодического
звена. Однако при выборе соотношения
имеем предельный случай апериодического
звена. Однако при выборе соотношения
![]() ,
,
![]() обеспечивается большее быстродействие,
т.к. обеспечивается более быстрое
вхождение в зону ±5%. В случае с
обеспечивается большее быстродействие,
т.к. обеспечивается более быстрое
вхождение в зону ±5%. В случае с
![]() и
и
![]() имеем колебательный процесс, однако
максимальное перерегулирование
составляет всего 4,3%. Настройка контура
на соотношение
имеем колебательный процесс, однако
максимальное перерегулирование
составляет всего 4,3%. Настройка контура
на соотношение
![]() и
и
![]() является настройкой на модульный
оптимум.
является настройкой на модульный
оптимум.
Таким образом, ПФ контура тока:
![]()
С другой стороны:
![]() ,
,
Откуда:

Или:
![]() , где
, где
![]() ,
,
 ,
,
![]() .
.
С учетом:
получим для ПФ регулятора тока:
![]()

![]()
![]() - получили ПИ-регулятор
- получили ПИ-регулятор
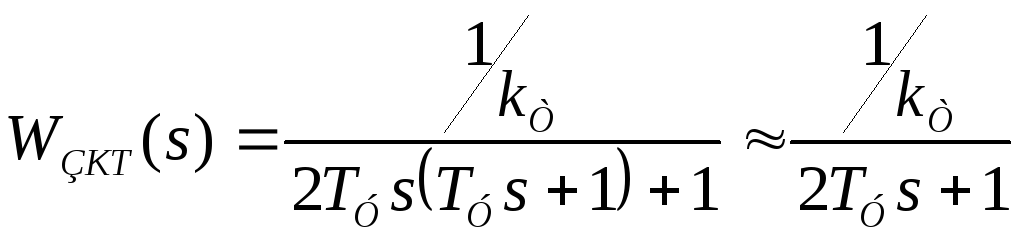
Для замкнутого контура тока при условии настройки на модульный оптимум передаточная функция примет вид:

Однако, малой постоянной в квадрате можно пренебречь, и тогда:

3) Расчет контура скорости
При настройке контура скорости на модульный оптимум, ПФ имеет вид:
![]() ,
где
,
где
![]() - некомпенсируемая малая постоянная
времени контура скорости.
- некомпенсируемая малая постоянная
времени контура скорости.
Замкнутый контур тока входит в контур скорости, как показано на рисунке 3:
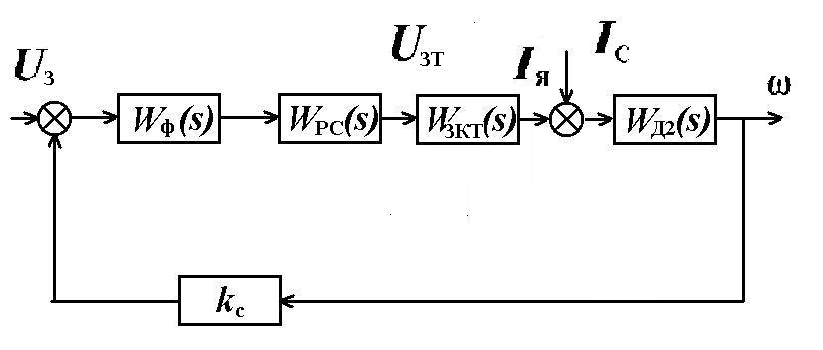
Рис. 3. Контур скорости.
Из структурной схемы на рисунке 3:
![]()
Откуда:
![]()
Где
Примем за постоянную времени
![]() сумму
сумму
![]() и
и
![]() :
:
![]()
Таким образом:
![]() - получим П-регулятор
- получим П-регулятор
При настройке на модульный
оптимум
![]() примет вид:
примет вид:
![]()
Для замкнутого контура:
![]()
Построим графики переходной
функции для разных значений
![]() :
:
Для
![]() =0.02
=0.02
![]() =38.8
перерегулирование 0% (рис.4)
=38.8
перерегулирование 0% (рис.4)
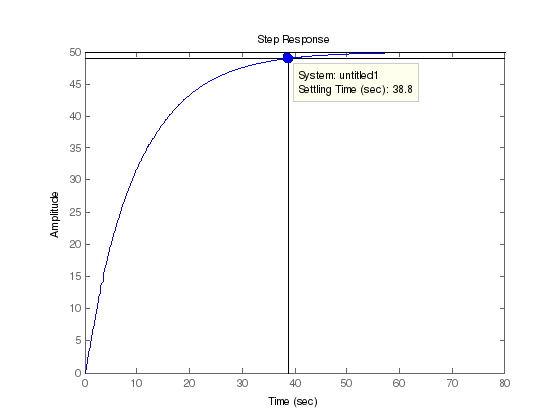
Рис. 4.
Для
![]() =0.1
=0.1
![]() =5,79
перерегулирование 0% (рис.5)
=5,79
перерегулирование 0% (рис.5)
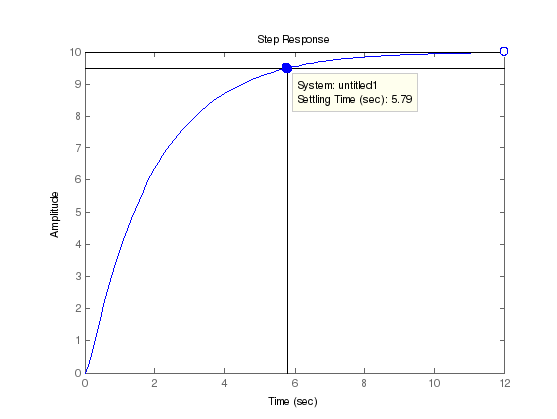
Рис.5.
Для
![]() =1.1
=1.1
![]() =0.649
сек. перерегулирование 5.68%; (рис.6)
=0.649
сек. перерегулирование 5.68%; (рис.6)
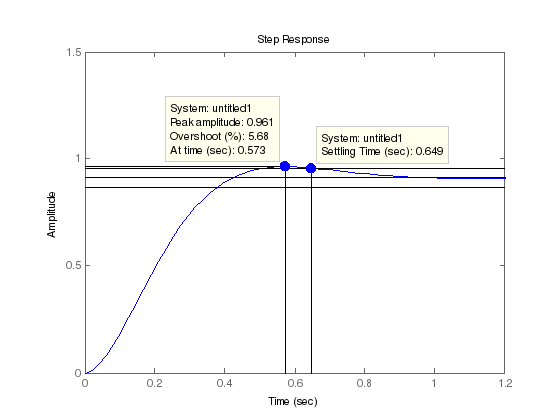
Рис.6
Для
![]() =1
=1
![]() =0.415
сек. перерегулирование 4.32% (рис.7)
=0.415
сек. перерегулирование 4.32% (рис.7)
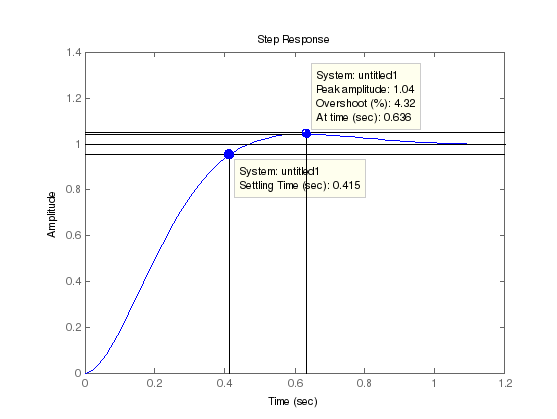
Рис.7.
Т.е. получим модульный оптимум
при
![]() =1.
=1.
Рассчитаем ПФ регулятора
скорости при
![]() =1:
=1:
![]() ,
т.е.
,
т.е.
![]()
4) Вычисление установившейся ошибки:
Расчёт установившихся ошибок
по возмущающему воздействию в процентах
к естественному перепаду скорости
двигателя
![]() в системе с настройкой контура на МО.
в системе с настройкой контура на МО.
Расчёт установившейся ошибки можно произвести из уравнения равновесия прохождения сигналов в исследуемой структуре (рис.3.):
![]() .
.
Положив задающее воздействие равным нулю, получим:
![]()
Откуда:
![]()
В установившемся режиме (s стремится к нулю) отнтосительный перепад скорости выражается:
![]()
5) Настройка на симметричный оптимум
Необходимо повысить порядок астатизма в части системы слева от точки приложения возмущающего воздействия. Для этого в контуре скорости вместо пропорционального используют ПИ-регулятор:
При этом получим переходную характеристику, представленную на рисунке 8.
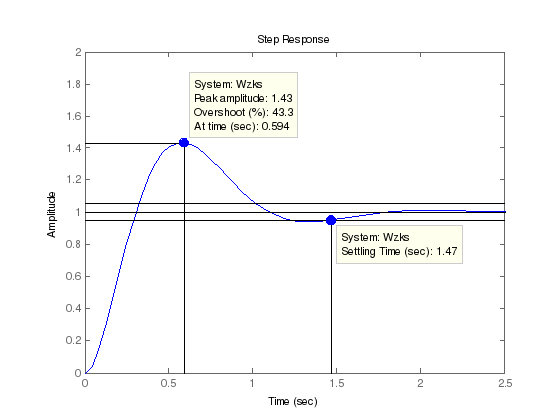
Рисунок 8. Переходная характеристика.
Как видно из рисунка 8,
наблюдается значительное увеличение
перерегулирования (43,3%), обусловленного
наличием звена с ПФ
![]() .
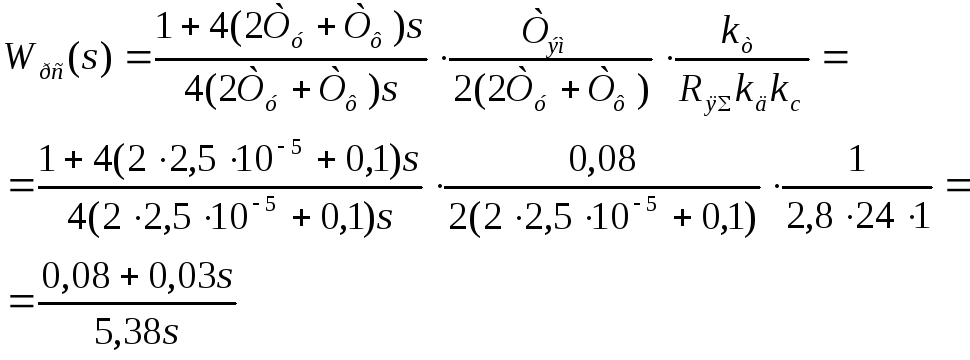
Чтобы переходный процесс соответствовал
прежней настройке на МО, необходимо
добавить входное звено с обратной
передаточной функцией:
.
Чтобы переходный процесс соответствовал
прежней настройке на МО, необходимо
добавить входное звено с обратной
передаточной функцией:
![]()
Структура системы с входнгым звеном – на рисунке 9:

Рис.9. Система с входным звеном
Тогда получим переходную характеристику, представленную на рисунке 10.

Рис.10. Переходная характеристика системы с входным звеном
На рисунке 10 наблюдается перерегулирование 8,15%, т.е. добавление входного звена уменьшило статическую ошибку.
Выводы
-
При настройке на модульный оптимум получаем малое время регулирования в системе за счет малого перерегулирования (4,3%), что обеспечивается настройкой контуров на соотношение
 и
и
 ,
где
,
где
 - малая постоянная времени контура. При
этом для настройки используется
П-регулятор.
- малая постоянная времени контура. При
этом для настройки используется
П-регулятор. -
При настройке на модульный оптимум в системе наблюдается значительная установившаяся ошибка, что может не соответствовать техническим требованьям к системе. В этом случае используется настройка на симметричный оптимум, что достигается использованием в контуре скорости ПИ-регулятора.
-
При настройке на симметричный оптимум наблюдается значительная динамическая ошибка (перерегулирование), вызванная наличием в регуляторе форсирующего звена первого порядка. Чтобы уменьшить ошибку, необходимо включить на вход системы обратное апериодическое звено первого порядка, которое скомпенсирует действие форсирующего звена и уменьшит динамическую ошибку.