

Санкт-Петербургский Государственный Электротехнический Университет
«ЛЭТИ»
Кафедра АПУ
ОТЧЕТ
по лабораторной работе №4
«Исследование механического объекта управления» («Вертолет»)
Выполнил:
Студент группы 4322
Факультет КТИ
Миненков Д.В.
Проверил:
Соловьев Н.В.
СПб 2006
Цель работы:
-
Исследование механического объекта управления, представляющего собой поворотную платформу. Экспериментальное определение вида математической модели ОУ и значений ее параметров.
-
Сравнение результатов, полученных аналитически в ходе проведения эксперимента с результатами расчета на ЭВМ.
На рис.1 представлена система стабилизации углового положения платформы, являющейся механическим объектом управления (ОУ). Платформа 1 свободно вращается в вертикальной плоскости вокруг оси 3. На одном конце этой оси закреплен цифровой датчик угла поворота МП-9 6, а на другом потенциометрический датчик обратной связи ПОС. На конце платформы жестко закреплен исполнительный двигатель с пропеллером 2, заключенный в кожух. При такой конструкции сила тяги пропеллера всегда перпендикулярна плоскости платформы. На противоположном конце платформы расположен статический 4 и вращающийся с помощью двигателя противовес 5. Так как исполнительный двигатель расположен ниже плоскости платформы и имеет существенную массу, центр тяжести объекта находится ниже плоскости платформы. На рис. 4.1 показаны следующие элементы структурной схемы управления: ЗП - задающий потенциометр; ПКЦ - последовательная корректирующая цепь; УПТ – усилитель постоянного тока; ПУ - промежуточный усилитель; ПКГ - преобразователь кода Грея в обычный двоичный код; ЭВМ - электронная вычислительная машина.

Рис. 1.
1)Определение тягового усилия пропеллера , когда противовес находится в положениях 1 и 4.

Рис.2. Схема проведения эксперимента.
В ходе проведения эксперимента, представленного на рисунке 2 были получены следующие результаты:
|
Положение противовеса |
mг, г |
lг ,см |
lт ,см |
αц ,град |
|
1 |
140 |
41,5 |
45 |
30 |
|
4 |
160 |
42 |
45 |
21 |
Откуда:
![]() Н
Н
![]() Н
Н
И из выражения:
![]() ;
;
![]()
Получим:
![]()
Т.е. для положения противовеса №1:
![]() Н·м
Н·м
И для положения №4:
![]() Н·м
Н·м
Для заданных значений α и
положений противовеса найдём тяговое
усилие
![]() ,
с учетом сил, действующих на ОУ, как
показано на рисунке 3:
,
с учетом сил, действующих на ОУ, как
показано на рисунке 3:

Рис.3. Силы, действующие на ОУ.
Из уравнения:
![]()
получим:
![]()
Подставив в полученное
выражение заданные значения углов и
рассчитанные произведения
![]() для двух положений противовеса, получим:
для двух положений противовеса, получим:
![]() Н
Н
![]() Н
Н
![]() Н
Н
![]() Н
Н
Сведем полученные результаты в таблицу:
|
Положение противовеса |
1 |
4 |
|
Угол, град |
|
|
|
81 |
1.12 |
1.23 |
|
90 |
1.25 |
1.37 |
2) Определение u и I якоря для заданных положений платформы при положениях противовеса 1 и 4.
В ходе эксперимента были получены следующие результаты:
|
|
Положение противовеса 1 |
Положение противовеса 4 |
||
|
α, град. |
U,В |
IЯ,А |
U,В |
IЯ,А |
|
81 |
19 |
0.9 |
22 |
1,5 |
|
90 |
22 |
1.05 |
24 |
1,2 |
По полученным результатам
рассчитаем значения
![]() и
и
![]() .
.
Из
![]() получим:
получим:
![]() ,
где
,
где
![]() рассчитано в п.1, а
рассчитано в п.1, а
![]() необходимо
рассчитать по результатам эксперимента
по формуле:
необходимо
рассчитать по результатам эксперимента
по формуле:
![]() ,
где
,
где
![]() ,
а
,
а![]() =3
Ом.
=3
Ом.
Рассчитаем значения
![]() для заданных положений платформы и
противовеса:
для заданных положений платформы и
противовеса:
![]() рад/с
рад/с
![]()
![]() рад/с
рад/с
![]() рад/с
рад/с
![]() рад/с
рад/с
Полученные результаты сведем в таблицу:
|
Положение противовеса |
1 |
4 |
|
Угол, град |
|
|
|
81 |
417,95 |
448,72 |
|
90 |
483,33 |
523,08 |
С учетом этого, получим:
![]()
![]()
![]()
![]()
Полученные результаты сведем в таблицу:
|
Положение противовеса |
1 |
4 |
|
Угол, град |
|
|
|
81 |
2,68 |
2,74 |
|
90 |
2,59 |
2,62 |
3) Определение параметров свободных колебаний платформы при положениях противовеса 1 и 4.
Процедура определения значений J и kС состоит в следующем. При FТ=0, т.е. при отсутствии задающего напряжения UЗ=0 фиксируется стационарное положение платформы по показаниям потенциометрического датчика α0=αЦ при заданных положениях противовеса 5. Затем вручную платформа перемещается в положение α=0 и отпускается, в результате чего она будет совершать колебания вокруг устойчивого положения равновесия α=α0=αЦ в соответствии с рис. 4:
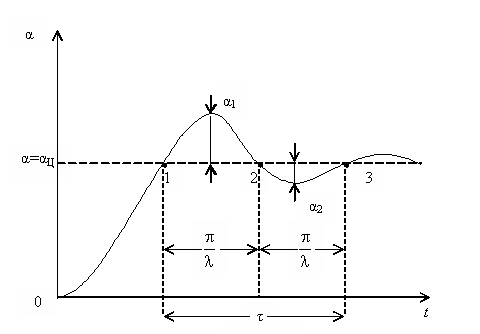
Рис.4. Колебания ОУ.
В ходе проведения эксперимента получены следующие результаты:
|
Положение противовеса |
αц ,град |
α1max ,град |
α2min ,град |
τ, сек |
|
1 |
30 |
48 |
14 |
4,4 |
|
4 |
21 |
36 |
10 |
4,31 |
По полученным результатам рассчитаем параметры свободных колебаний:
![]() ;
;
![]()
![]() ;
;
![]()
Рассчитаем ζ и Т:
 0,037;
0,037;
 0,098;
0,098;
 0,69
0,69  0,68
0,68
![]()
![]() ;
;
![]()
![]()
![]() ;
; ![]()
![]()
![]() ;
;
![]()
![]()
![]() ;
; ![]()
4) Общий вид передаточной функции объекта управления:
![]()
Т.к. объект управления нелинейный, параметры передаточной функции для различных рабочих точек будут отличаться друг от друга. Рассчитаем их для заданных рабочих точек и положений противовеса по формулам:
 ,
,
![]() ,
,
![]() ,
где
,
где
![]() .
.
Полученные результаты сведем в таблицу
|
|
Положение противовеса 1
|
Положение противовеса 4
|
||
|
Угол, град |
90 |
81 |
90 |
81 |
|
|
1.38 |
1.10 |
1,77 |
1,27 |
|
|
0.99 |
0.88 |
1,13 |
0,96 |
|
|
0.053 |
0.047 |
0.162 |
0.137 |
:
Подставив полученные значения в общее выражение для ПФ объекта, получим четыре выражения для исследуемых рабочих точек.
Полученные результаты сведем в таблиц:
|
Угол, град |
Положение противовеса 1 |
Положение противовеса 4 |
|
90 |
|
|
|
81 |
|
|