

Лабораторная работа 6 / Попытка сделать ЛР6
.docСанкт-Петербургский Государственный Электротехнический Университет «ЛЭТИ»
Кафедра АПУ
Отчет
по лабораторной работе №6
по дисциплине «Теория автоматического управления»
«Анализ устойчивости нелинейных систем»
Выполнили:
студенты гр. 4322
факультет КТИ
Миненков Д.В.
Золотарев А.Р.
Проверил:
Имаев Д. Х..
СПб 2007 г.
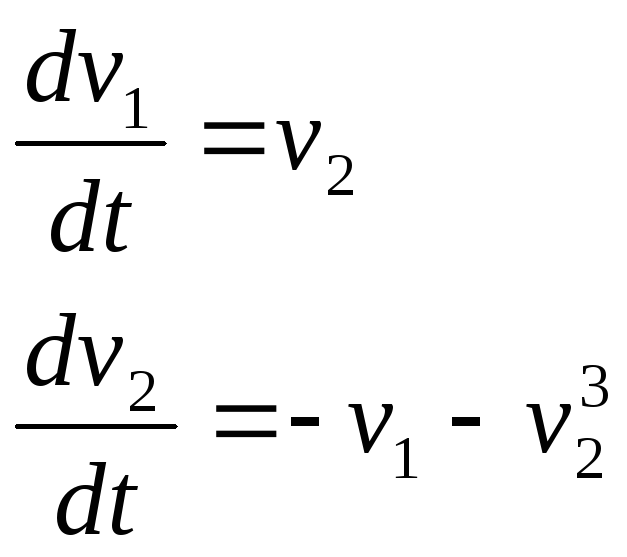
Цель работы: применение первого и второго метода Ляпунова для анализа осциллятора с нелинейным демпфированием.
Математическая модель осциллятора имеет вид:
 (естественный
базис)
(естественный
базис)
Найдем положения равновесия, т.е. положения, в которых производные от переменных состояния равны нулю:
![]()
«Перенесем» начало координат в точку равновесия системы:
![]()
Необходимо исследовать устойчивость этого положения равновесия.
-
Применение первого метода Ляпунова.
Применение первого метода сводится к исследованию линеаризованных уравнений.
Пусть переменных малы. Тогда
в исходных уравнениях состояния можно
пренебречь членом
![]() ,
в результате чего получим линейные
уравнения:
,
в результате чего получим линейные
уравнения:
Запишем систему уравнений состояния в матричной форме:

Или:
![]()
Характеристический полином матрицы А:
![]()
Корни характеристического полинома:
![]() ,
,
Т.е. корни находятся на границе устойчивости. Таким образом, первый метод Ляпунова не позволяет сказать что-то об устойчивости положения равновесия, т.к. неизвестно, как действует член, которым мы пренебрегли на расположение полюсов.
2. Второй (прямой) метод Ляпунова
Второй метод Ляпунова не связан с линеаризацией.
Выберем положительно – определенную функцию:
![]()
Найдем производную этой функции по времени:
![]()
В силу диф. уравнений системы, имеем:
![]()
Функция
![]() обращается в ноль в точке равновесия
(0).
обращается в ноль в точке равновесия
(0).
Получили отрицательную знакопостоянную функцию, следовательно, положение равновесия устойчиво.
3. Компьютерное моделирование.
А) Смоделируем систему, полученную по первому методу Ляпунова:

Структура системы на рисунке 1.
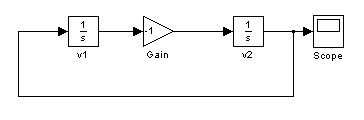
Рис.1. Линеаризованная система.
Как и следовало ожидать, в такой системе наблюдается колебательный процесс:
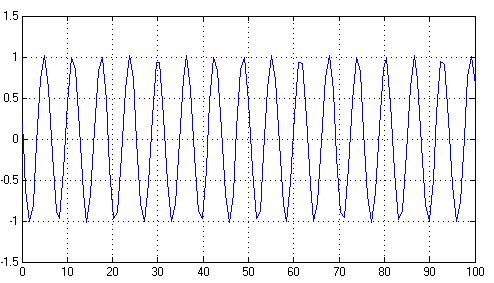
Рис.2. Процессы в системе
Б) Моделирование нелинеаризованной системы:

Рис.3. Нелинеаризованная система.
В такой системе реакция на начальные условия 0.05 и -0.05 :
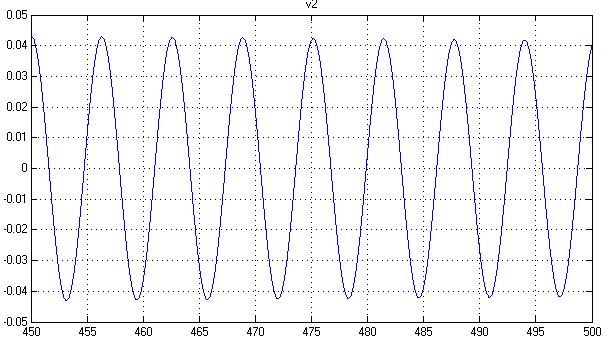
Рис.4. Реакция на НУ.
По рисунке 2 о положении равновесия ничего сказать нельзя. Однако если рассмотреть 2 соседних пика:
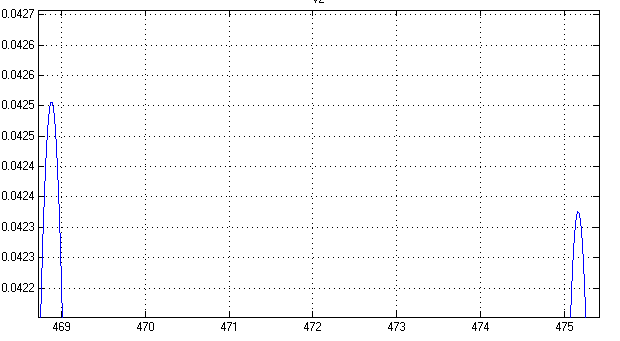
то видно затухание колебаний,
т.е. процессы затухают при
![]() .
.
Вывод: компьютерное моделирование не дает нам ответ на вопрос об устойчивости системы. Только второй метод Ляпунова позволяет сделать вывод об устойчивости.
Фазовый портрет системы:
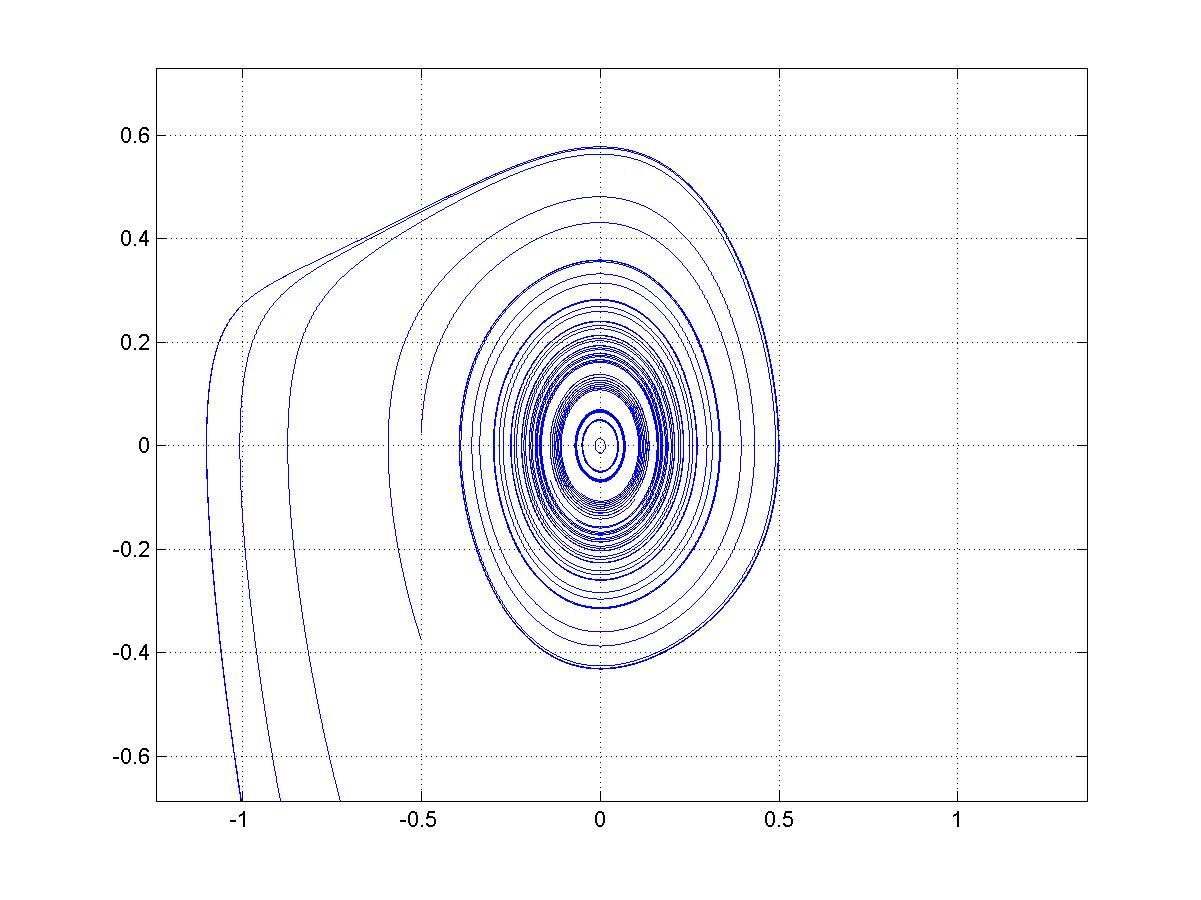
Рис.6. Фазовый портрет.
4. Аналитический способ
Разделим одно уравнение на другое:
![]()
Не удается разделить переменные.
Проведем компьютерное моделирование, задав структурную схему:
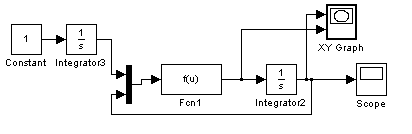
Рис.7. Структурная схема
В блоке функции задано: -(u[1]+ u[2]^3)/ u[2]).
5. Анализ устойчивости нелинейной системы, заданной в форме структурной схемы.
На рисунке 8 изображена структурная схема:
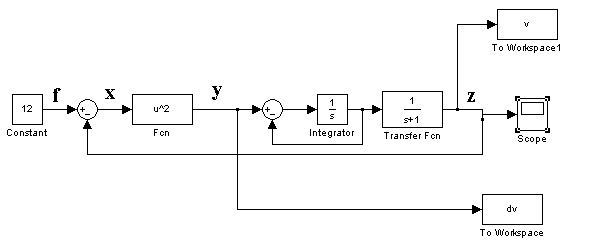
Рис.8. Структурная схема.
5.1. Найдем точки равновесия
![]()
![]() =0
=0
![]()
Т.е. действительные решения
получи при
![]()
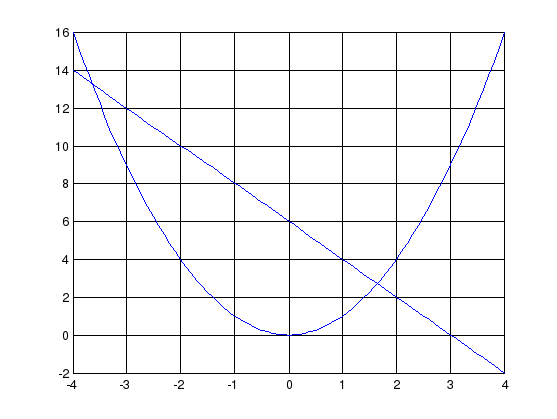
Рис.9.
Пусть f=12. Тогда:
![]() ;
;
![]() ;
;
![]()
5.2 Исследование первым методом Ляпунова.
Линеаризация:
![]()
![]()
5.3. Анализ устойчивости линеаризованной системы
Характеристический полином замкнутой системы.
![]() - все коэффициенты больше нуля, условие
устойчивости выполнено
- все коэффициенты больше нуля, условие
устойчивости выполнено
![]() - условие устойчивости не выполнено
- условие устойчивости не выполнено
5.4. Фазовый портрет нелинейной системы
1)
![]() устойчивый
фокус
устойчивый
фокус
2)
![]() неустойчивый
узел
неустойчивый
узел
Построим фазовый портрет, построив систему в Simulink:
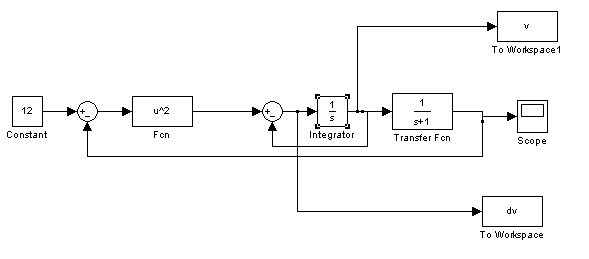
Рис.10. Структурная схема системы.
В результате получим фазовый портрет системы:

Рис. 11. Фазовый портрет.
На рисунке 11 четко видны устойчивый фокус в точке (9,0j) и неустойчивый узел в точке (16, 0j).