

Лекция №2
Непараметрические методы классификации
Алгоритмы распознавания образов часто классифицируют как параметрические и непараметрические. Для некоторых задач бывает априорно известно, что образы характеризуются рядом параметров. Параметрический подход может основываться на дискриминантных функциях, связанных с классом плотностей вероятностей, определяемых относительно малым числом параметров. С другой стороны, существуют другие классификаторы, в которых не делается никаких предположений о характеризующих параметрах. Несмотря на то, что параметризация дискриминантных функций (т.е. коэффициенты многомерных полиномов) используется в непараметрических методах, не предполагается соответствующей формы распределения. В этом состоит отличие от параметрического представления.
В параметрических методах обычно предполагается, что классы образов порождаются многомерными нормальными распределениями. Далее рассмотрим основы построения непараметрических классификаторов.
2.1. Решающие поверхности и дискриминантные функции
Как было показано в лекции 1, каждый образ отображается в виде точки в пространстве образов. Образы, относящиеся к разным классам, попадают в разные области в пространстве классов и, соответственно, могут быть разделены разделяющими поверхностями.
Разделяющие поверхности, называемые решающими поверхностями, могут быть формально определены как поверхности вn-мерном пространстве, которые используются, чтобы разделить известные образы на их соответствующие категории и используются для классификации неизвестных образов.
Такие поверхности можно определить как гиперплоскости, имеющие размерность n-1. Когдаn<1 решающая поверхность представляет собой точку, как показано на рис.2.1., где точка А разделяет классыw1иw2 и точка В — разделяющая точка дляw2иw3.

Рис. 2.1.
Когда n=2 решающая поверхность становится линией
w1*x1+w2*x2+w2=0
как показано на рис.2.2.
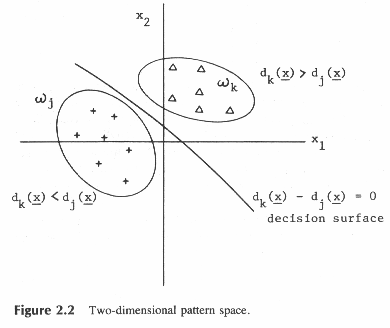
Рис. 2.2.
Когда n=3 — поверхность является плоскостью, дляn=4 или больше — это гиперплоскость
w1*x1+w2*x2+……….wк*xк+wк=0,
представимая в матричной форме как
Wт*Х=0,
где
 ,
,
 ,
,
где Wи Х называютсярасширенным весовым векторомирасширенным вектором образа.
Для удобства скаляр
wn+1добавлен в весовой вектор и,
соответственно, вектор![]()
![]() становится (n+1)-мерным
путем добавленияxn+1=1.
становится (n+1)-мерным
путем добавленияxn+1=1.
Это позволяет представить все линейные дискриминантные функции проходящими через начало координат.
Дискриминантная
функция — это функция d(![]() ),
которая определяет решающую поверхность.
Как показано на рис.2.2. dk(Х) и dj(Х)
— являются дискриминантными функциями
для образа Х в классах k и j соответственно.
),
которая определяет решающую поверхность.
Как показано на рис.2.2. dk(Х) и dj(Х)
— являются дискриминантными функциями
для образа Х в классах k и j соответственно.
d(Х)= dk(Х) - dj(Х)=0 будет уравнением, которое определяет поверхность, разделяющую классы k и j.
Мы можем сказать,
что dk(Х) > dj(Х)![]() x
x![]() wk
,
wk
,![]() j
j![]() k,j=1, 2, 3, …M.
k,j=1, 2, 3, …M.
Система для классификации образа Х показана на рис.2.3.

Рис.2.3. Схематическая диаграмма построения простой классификационной системы .
d1(Х) = d2(Х)
или
d(Х)= d1(Х) – d2(Х)=0
будет определять разделяющую гиперплоскость между двумя классами.
В общем случае для М различных классов требуется М(М-1)/2 разделяющих поверхностей, но некоторые из них избыточны. Вообще, для разделения М классов достаточно М-1 поверхностей.
На рис.2.4. показан для двумерного пространства ряд разделяющих поверхностей как функции числа категорий, на которые надо классифицировать.
На рис.2.4а представлена решающая поверхность, разделяющая 2 категории.
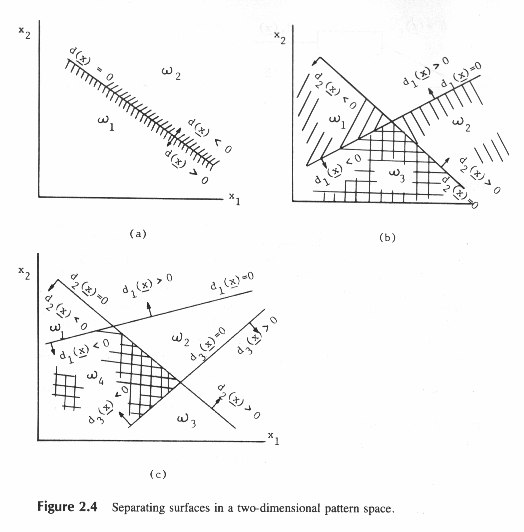
Рис.2.4. достаточно понятен.
Здесь есть область d1(Х) < 0; d2(Х) < 0.
Она не принадлежит w1и w2 и может быть названа w3 .
То же самое имеет место на рис.2.4с.
Здесь области:
W1 : d1(Х) > 0;
W2 : d2(Х) > 0; d1(Х) < 0
W3 : d2(Х) < 0; d3(Х) > 0
Область:
d1(Х) < 0
d3(Х) < 0
![]() не определена
не определена
d2(Х) < 0
Пример:для М=2 классов найдем дискриминантную функцию для классификации двух образов на две категории
И
![]()
![]()
Возьмем d(Х) = Х1– ½Х2 – 2 и проверим
d(Х1) =w’*
![]() 1
= (1 – ½ – 2)
1
= (1 – ½ – 2)![]() = -3 < 0
= -3 < 0
d(Х2) =w’*
![]() 2
= (1 – ½ – 2)
2
= (1 – ½ – 2)![]() = +1 > 0
= +1 > 0
Т.е. d(Х) можно использовать как дискриминантную функцию.