

Курсовик2 / TU
.DOCКурсовая работа по «Теории Управления».
«Система измерения дальности.»
Построение функциональной схемы системы, применив для измерения дальности признак сдвига по фазе отраженных от объекта периодических импульсов, посылаемых от РЛС. Для фазовращателя в системе использовать вращающийся трансформатор. В качестве исполнительного устройства применить асинхронный управляемый двигатель с редуктором.
|
|
Исходные данные: |
Номиналы: |
|
1. |
Номинальное напряжение двигателя Uд, В |
36 |
|
2. |
Номинальная скорость вращения двигателя n, об/мин |
4000 |
|
3. |
Электромеханическая постоянная времени двигателя с учетом нагрузки Tэм, с |
0.02 |
|
4. |
Коэффициент передачи редуктора kр, град/град |
0.004 |
|
5. |
Коэффициент передачи фазовращателя kфв, град/град |
1 |
|
6. |
Постоянная времени фильтра Tф, с |
0.01 |
|
7. |
Статическая ошибка системы ст |
0 |
|
8. |
Добротность системы k, 1/с |
150 |
|
9. |
Время регулирования tр, с |
0.25 |
|
10. |
Максимальное перерегулирование max, % |
25 |
|
11. |
При синтезе системы использовать диаграмму В.В.Солодовникова. |
|
Построение функциональной схемы:
Передаточные функции:
Ф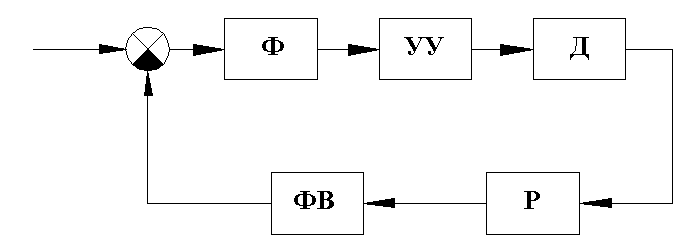 – фильтр.
– фильтр.
УУ – управляющее устройство.
Д – двигатель.
ФВ – фазовращатель.
Р – редуктор.
Wф(s)
=
![]() ;
;
Wд(s)
=
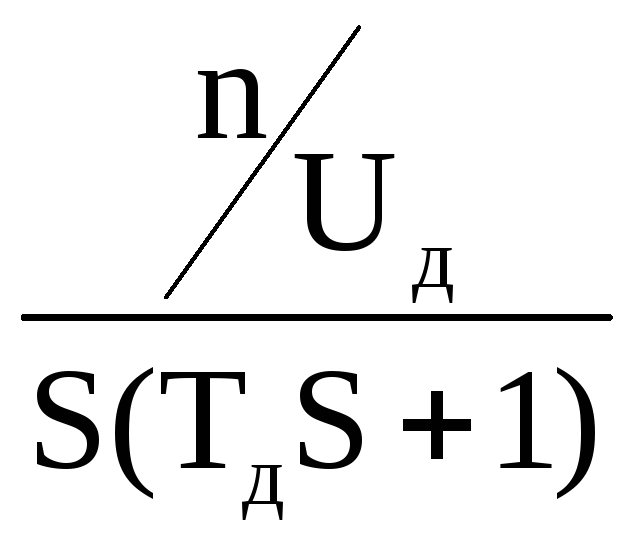 ;
;
Wфв(s) = 1;
Wуу(s) = k;
Wр(s) = kp;
Выбираем порядок астатизма.
В данном случае порядок астатизма – первый. (Один интегратор – двигатель).
Составление исходной передаточной функции и ЛАЧХ.
Wисх(s)
= Wф(s)
Wуу(s)
Wд(s)
Wр(s)
Wфв(s)
=
![]()
Допустим, что k =200, тогда получим:
Wисх(s)
=![]()
Графическое изображение требуемых ЛАЧХ и ФЧХ см. в Приложении 1.
Построение желаемой ЛАЧХ разомкнутой системы по заданны показателям качества.
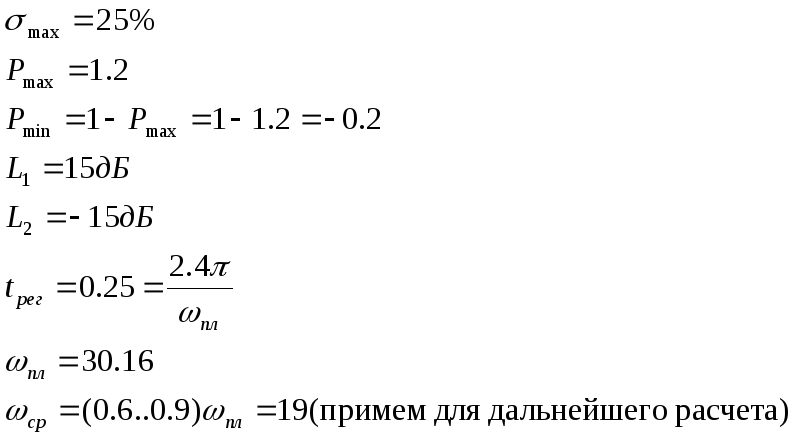
![]()
![]()
З
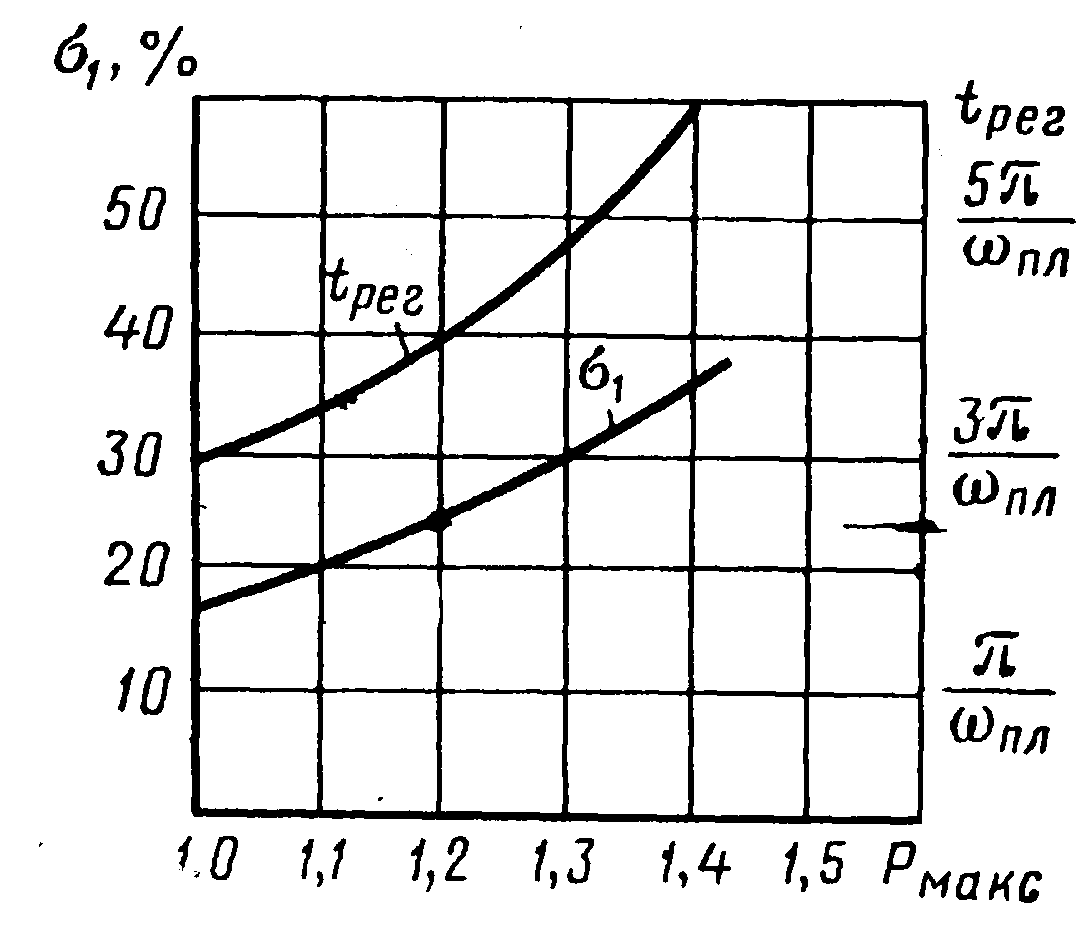 начения
найденных выше значений найден по Рис.1
и Рис.2.
начения
найденных выше значений найден по Рис.1
и Рис.2.
Рис.1. – слева.
Рис.2. – справа.
Графическое изображение желаемой ЛАЧХ см. В Приложении 2.
Расчет корректирующего устройства.
После построения желаемой и исходной ЛАЧХ в Приложении 2. , путем сопряжения мы получили искомое корректирующее звено. Теперь необходимо определить его ПФ.
По виду ЛАЧХ корректирующего звена, мы выбираем схожуу по форме ЛАЧХ из учебного пособия.
T1=14.29
T2=0.74
(подбирается с учетом того, что
![]() )
)
T3=0.01
T4=0.00052
Т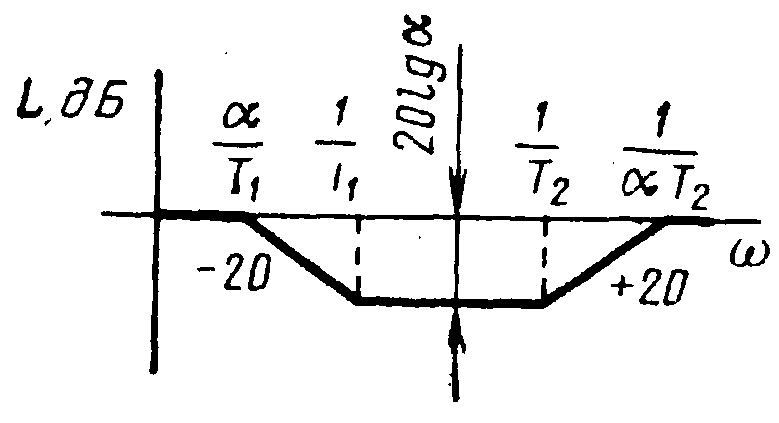 аким
образом, мы получаем искомую ПФ
Корректирующего устройства.
аким
образом, мы получаем искомую ПФ
Корректирующего устройства.
Wкз(s)
=![]()
С хема
RC-цепи
корректирующего устройства:
хема
RC-цепи
корректирующего устройства:
=
![]() .
.
T2 = R1C1;
T3 = R2C2;
Построение ЛАЧХ и ФЧХ скорректированной системы для разомкнутого состояния.
Передаточная функция скорректированной системы для разомкнутого состояния имеет вид:
Wисх(s)
Wкз(s)
=
![]()
![]()
Wскорр.раз(s)
=![]()
Графические изображения ЛАЧХ и ФЧХ скорректированной системы см. В Приложении 3.
П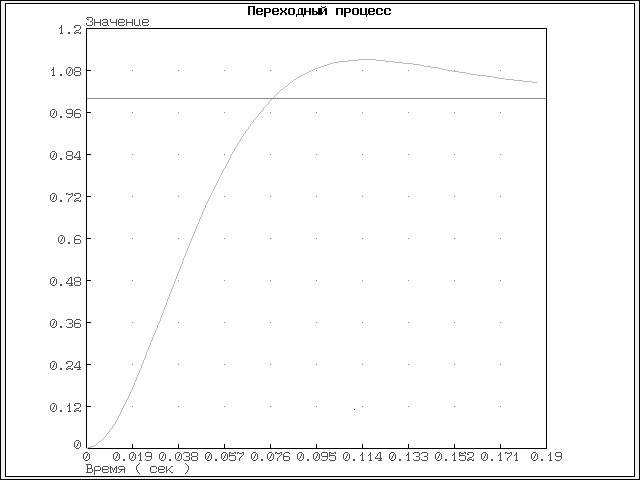 роверка
расчета ПП системы управления при
единичном воздействии.
роверка
расчета ПП системы управления при
единичном воздействии.