

Курсовая работа1 / Курсовая_работа_beta
.docМинистерство образования и науки Российской Федерации
Федеральное агентство по образованию
С АНКТ-ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ "ЛЭТИ"
ИМЕНИ В.И.
УЛЬЯНОВА (ЛЕНИНА)
АНКТ-ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ "ЛЭТИ"
ИМЕНИ В.И.
УЛЬЯНОВА (ЛЕНИНА)
1 97376,
Санкт-Петербург, ул. проф. Попова, 5.
97376,
Санкт-Петербург, ул. проф. Попова, 5.
Факультет компьютерных технологий и информатики
Кафедра вычислительной техники
«ЗАЧТЕНО»
_________ И.И. Канатов
“__” ____________ 2006 г.
ОТЧЕТ по курсу "Основы теории управления"
Выполнили: студенты гр. 3372
Петров Р.
Калач А.
Санкт Петербург 2006
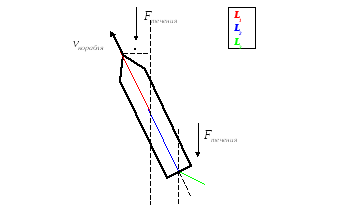
Надводный водоизмещающий корабль (судно) движется в заданном направлении по определенному маршруту. Удержание корабля на заданном маршруте является основной целью управления движением.
Постоянство скорости корабля на маршруте есть результат взаимной компенсации силы тяги движителей и гидроаэродинамического сопротивления на корпусе.
Вычисление передаточной функции.
При составлении передаточной функции воспользуемся следующими уравнениями:
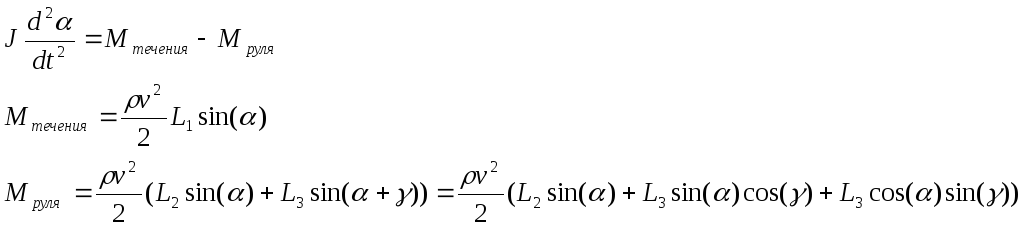
Производим линеаризацию с помощью ряда Телора:
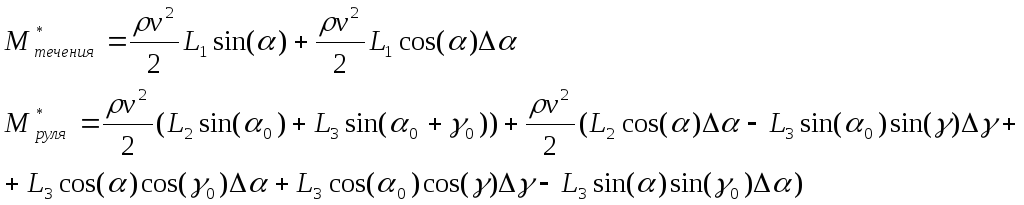 Вычитаем
статические составляющие:
Вычитаем
статические составляющие:
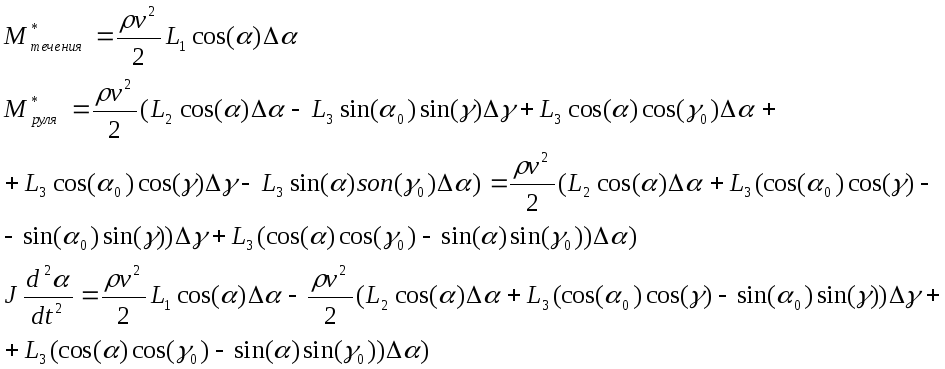
Переносим α влево, а γ вправо (α0=γ0=0)
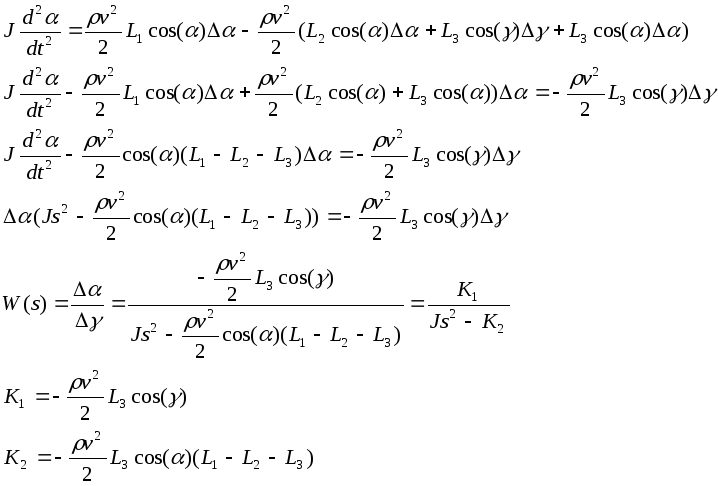
Пусть
![]()
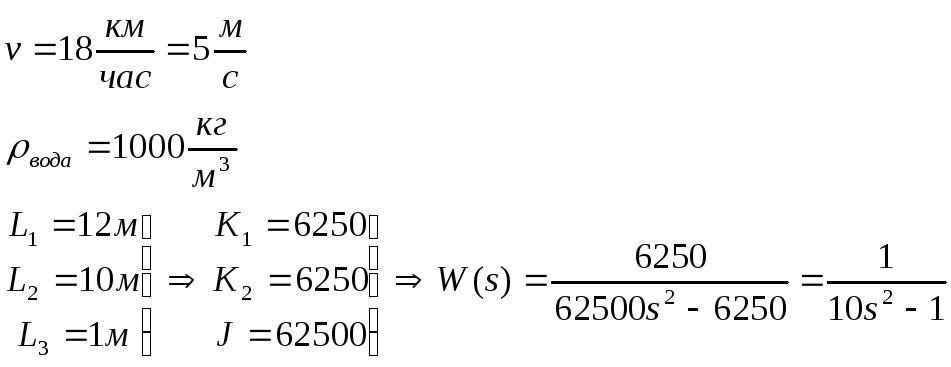

![]()
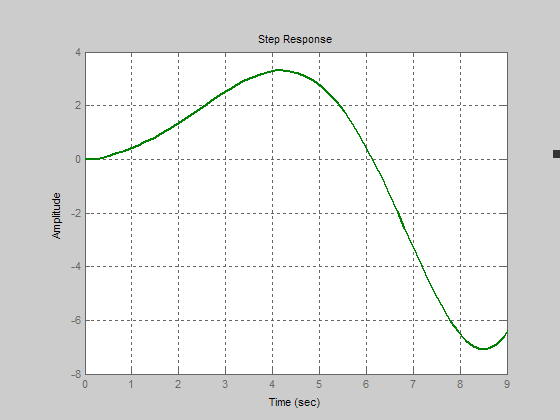
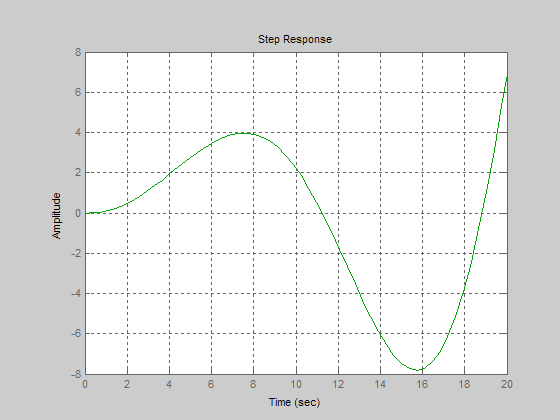
В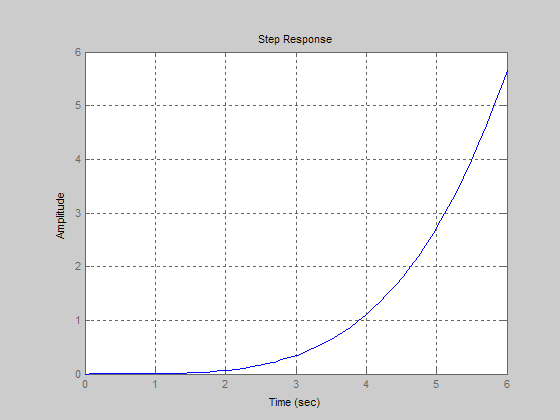 ременная
характеристика:
ременная
характеристика:
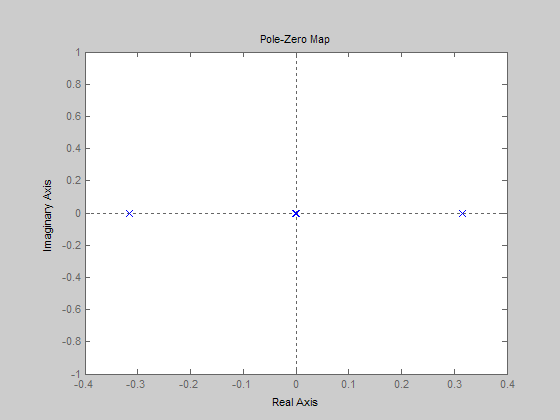
Корни передаточной функции:
Логарифмические АЧХ и ФЧХ:
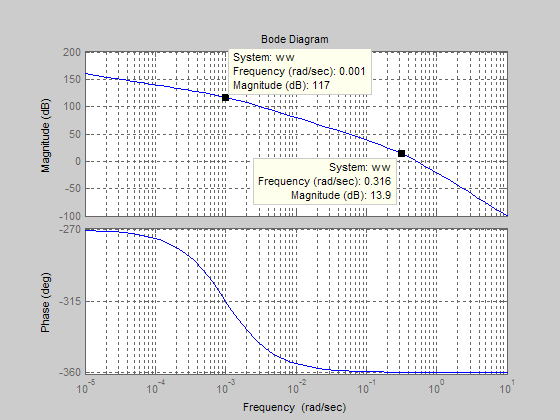
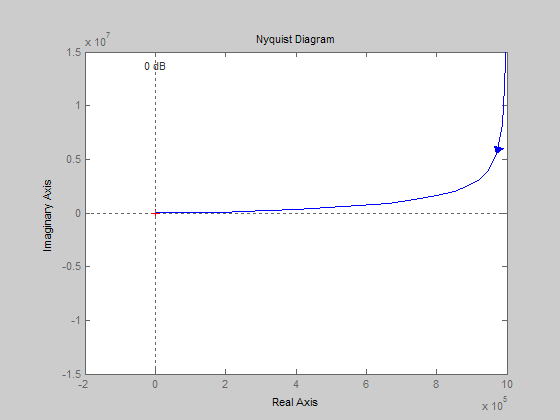
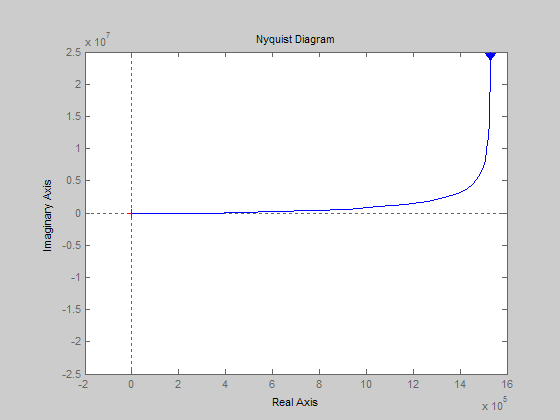
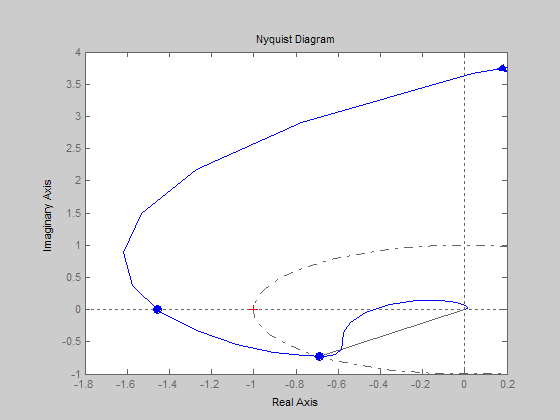
Диаграмма Найквиста:

Пассивное корректирующее звено.
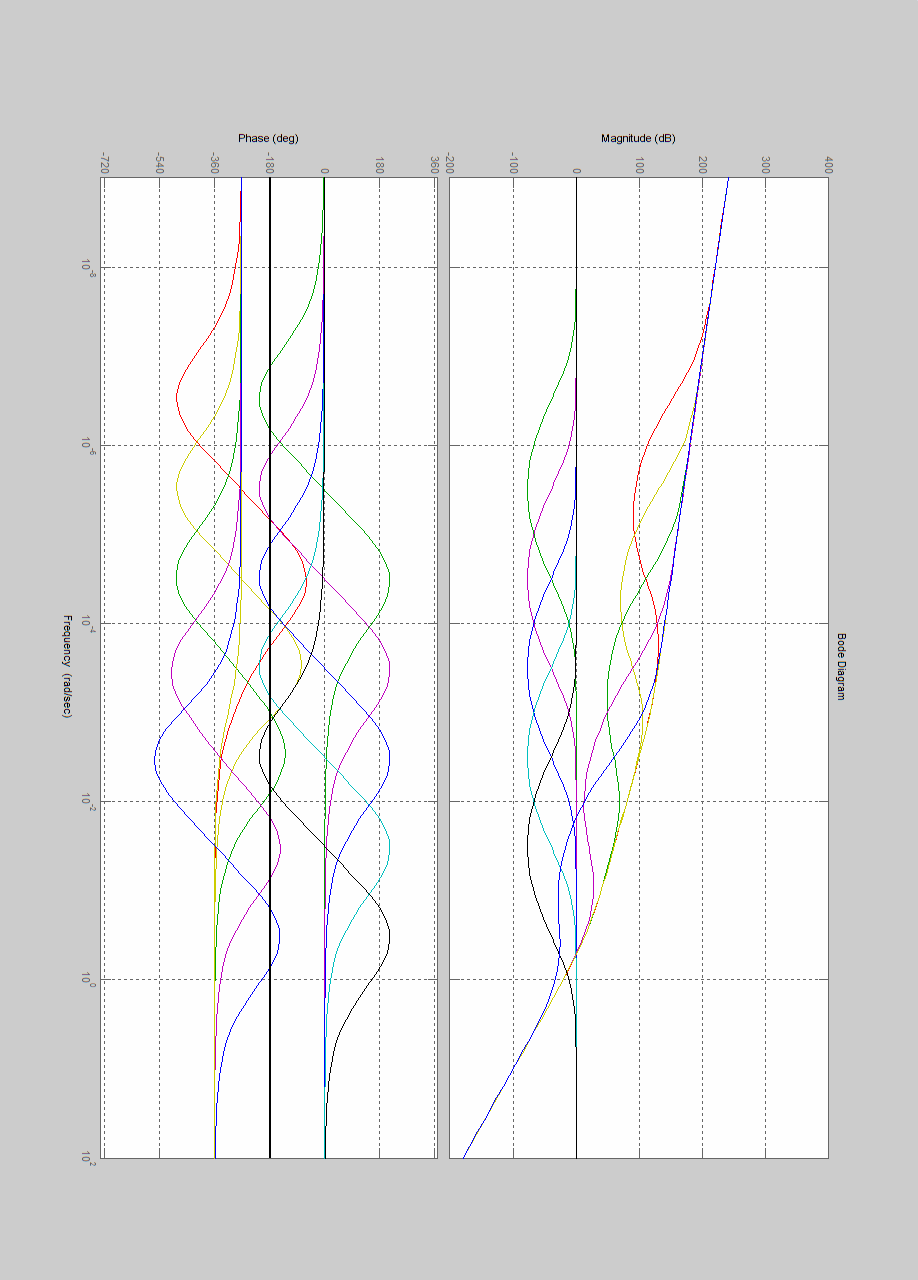
1)
![]()
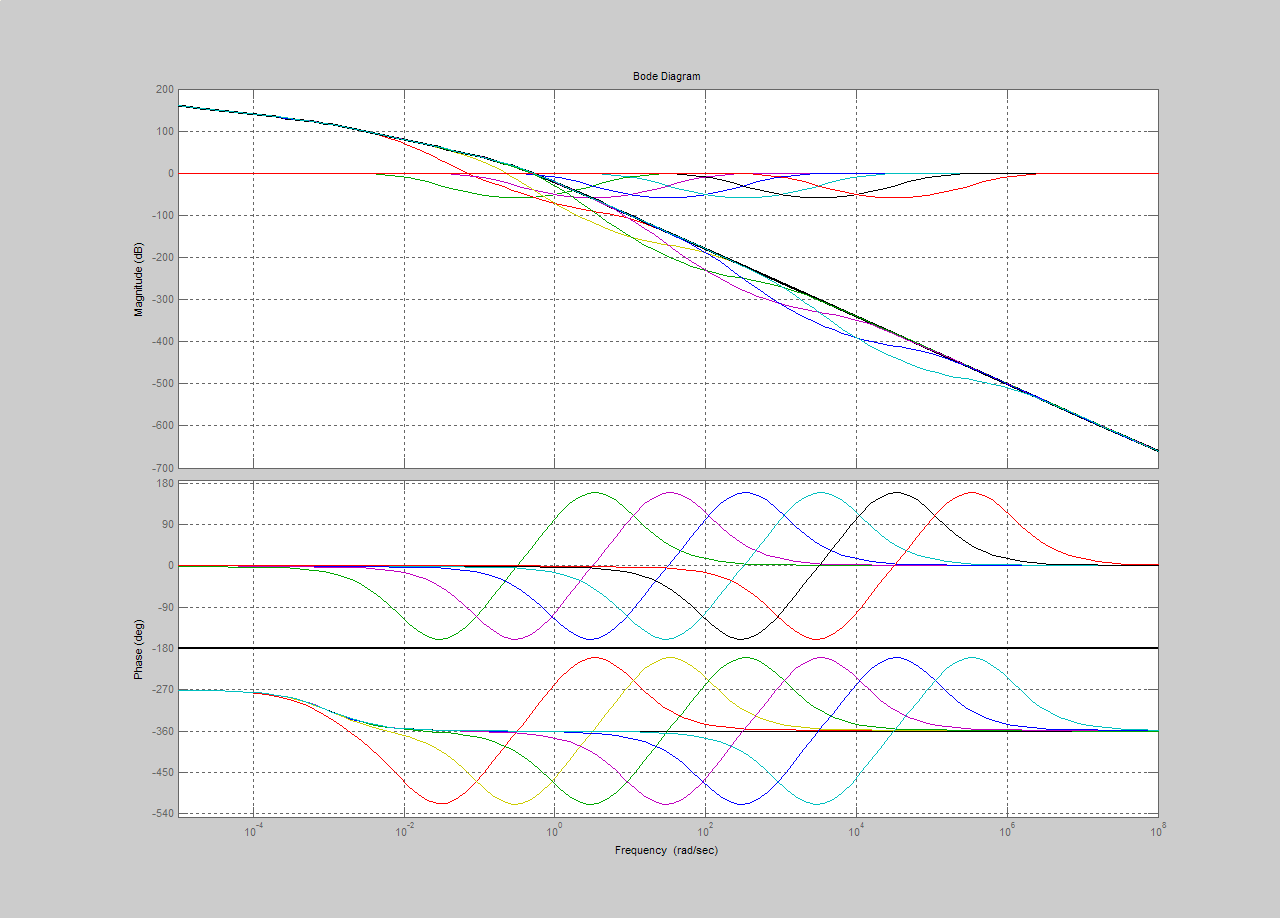
Рассматривая T=10-x где x принимает значения от 0 до 5 с шагом 1, наблюдаем:
Пассивное корректирующее звено не делает систему устойчивой, т.к. ФХ не пересекает уровень -180º снизу.
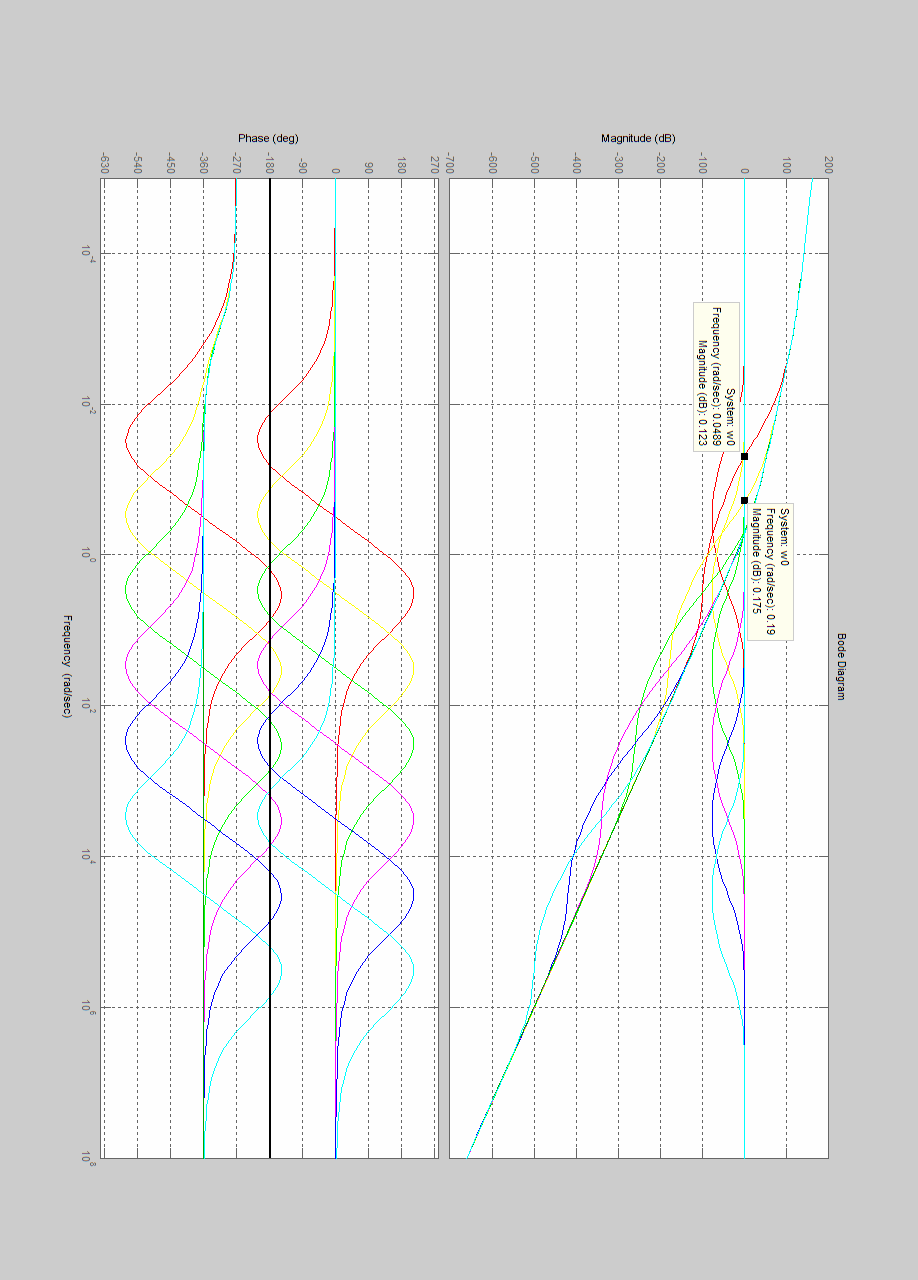
Р ассматривая
цикл от -5 до -1:
ассматривая
цикл от -5 до -1:
При T=10-5, и при T=10-4 фаза пересекает уровень -180º, но система остается не устойчивой, т.к. точка пересечения уровня -180º фазой сверху левее ωср.
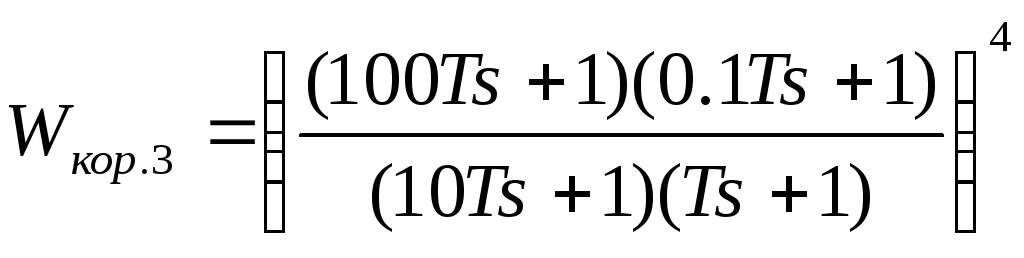
2)
![]()
( 0:5)
0:5)
(-5:-1)
( -2:0,5:-1,5)
-2:0,5:-1,5)
При помощи пассивной коррекции не возможно сделать данную систему устойчивой.
Активное корректирующее звено.
(0:4) T=10-1 T=10-2
T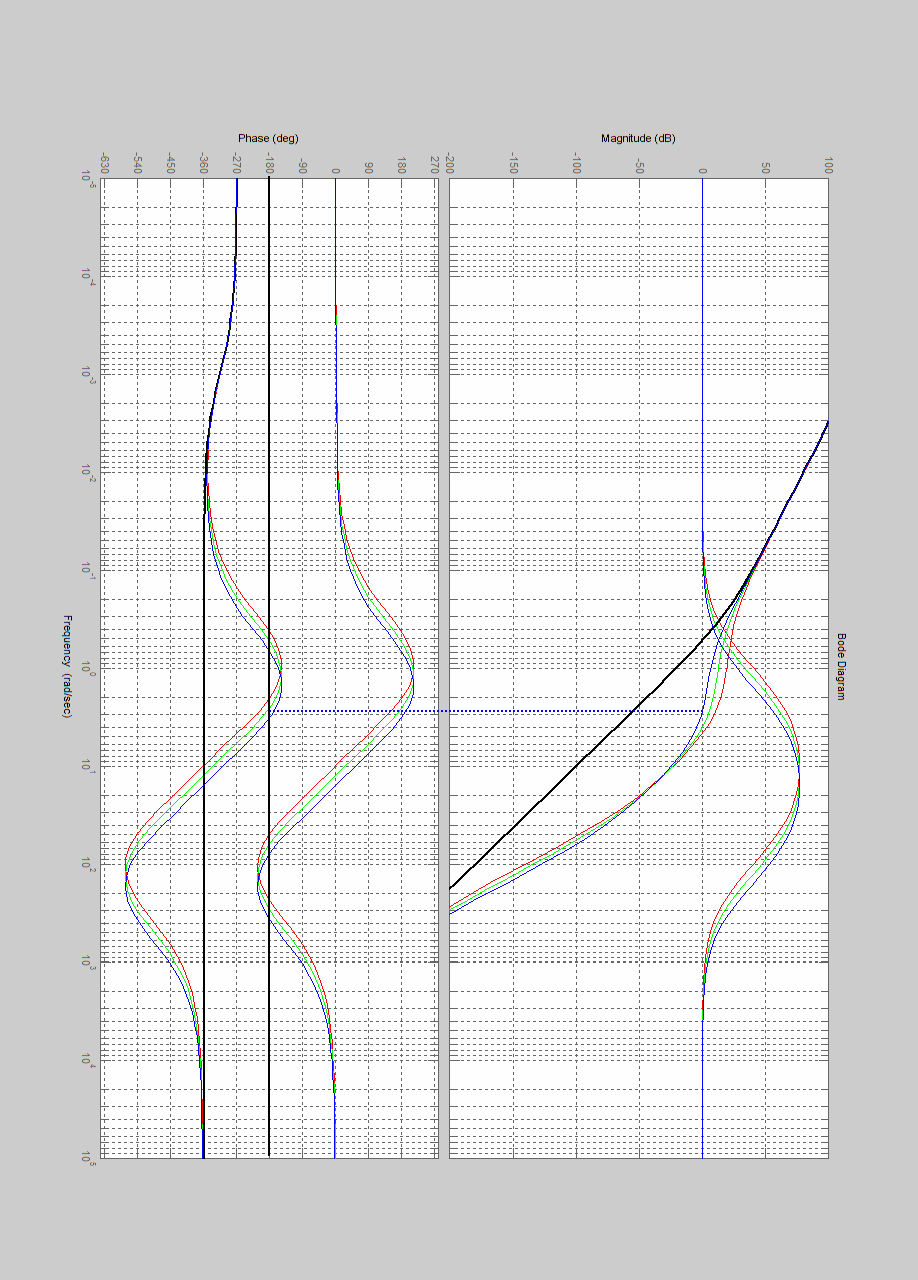 =10-1,5
T=10-1,6
T=10-1,7
=10-1,5
T=10-1,6
T=10-1,7
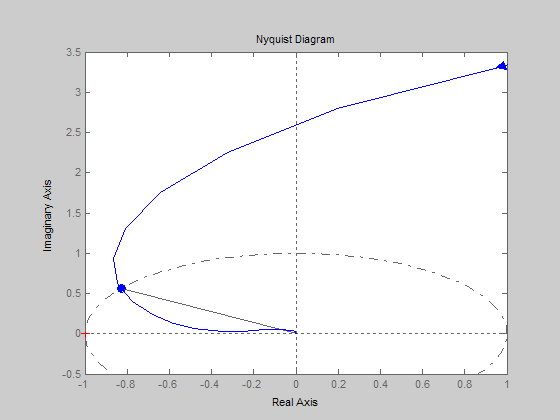
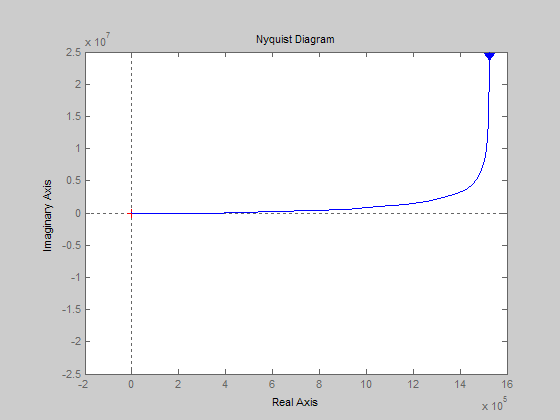
Диаграмма
Найквиста: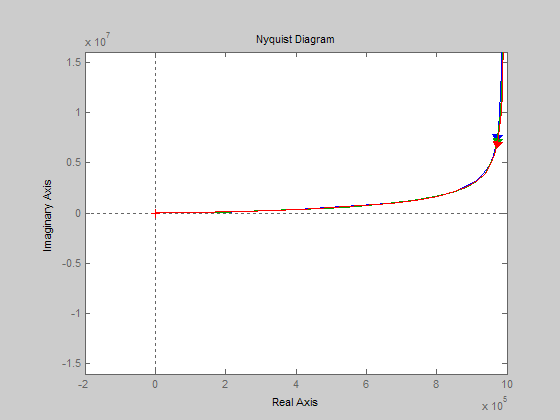
П
 ереходные
характеристики для T=10-1,5;
T=10-1,6;
T=10-1,7
соответственно:
ереходные
характеристики для T=10-1,5;
T=10-1,6;
T=10-1,7
соответственно:
T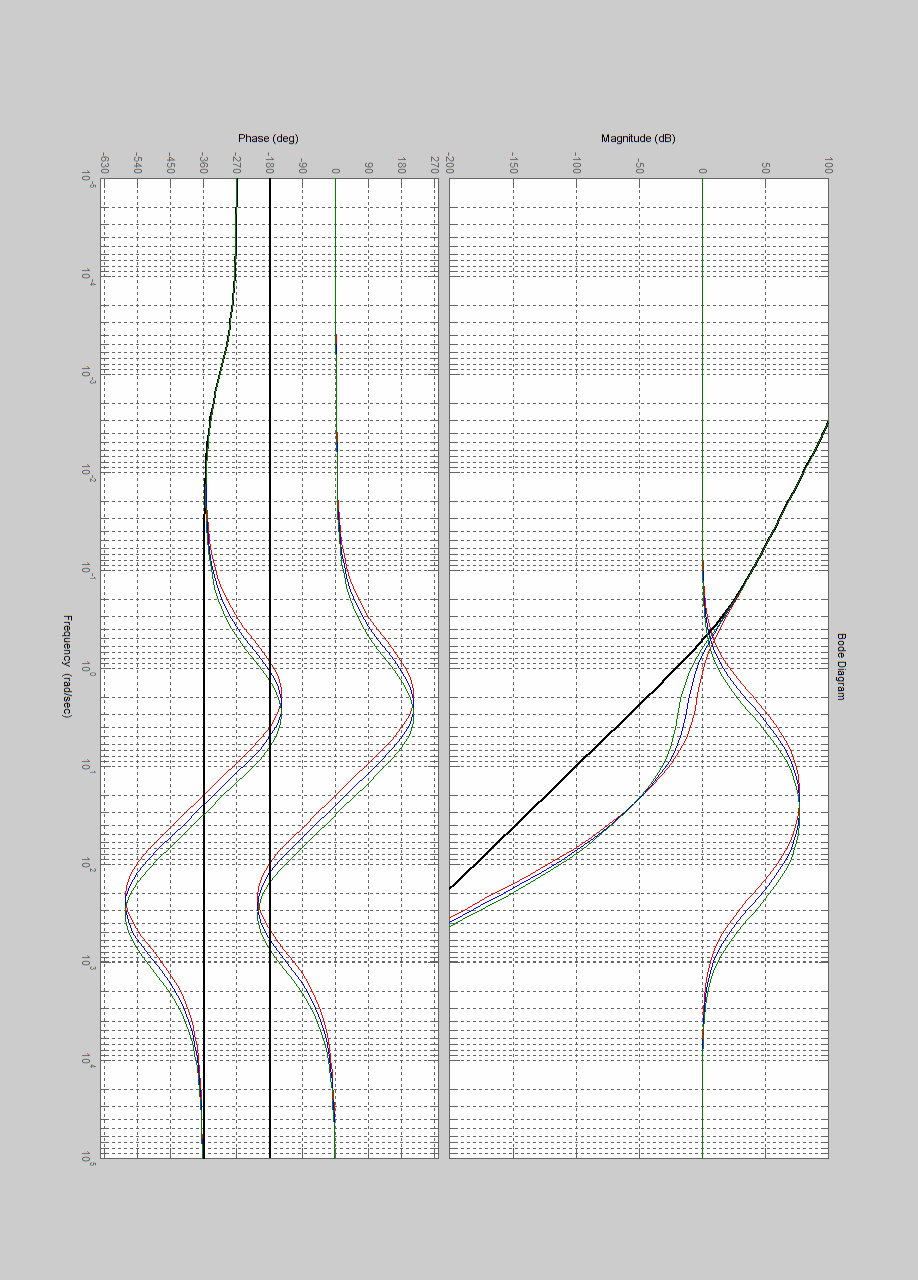 =10-1,8
T=10-1,9
T=10-2
=10-1,8
T=10-1,9
T=10-2
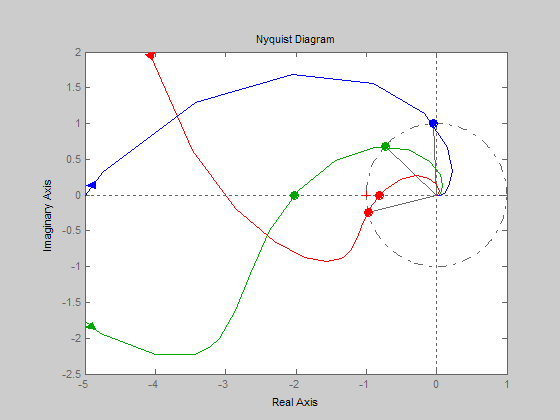
Д
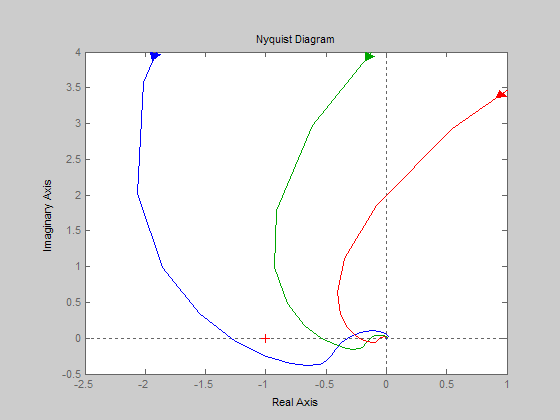 иаграмма
Найквиста:
иаграмма
Найквиста:
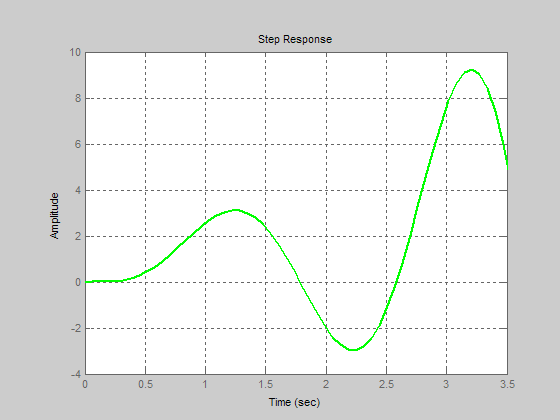
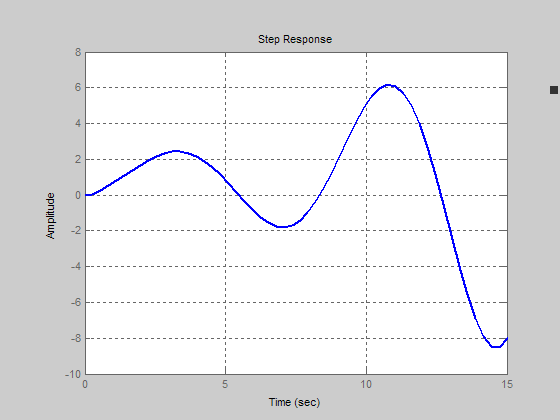
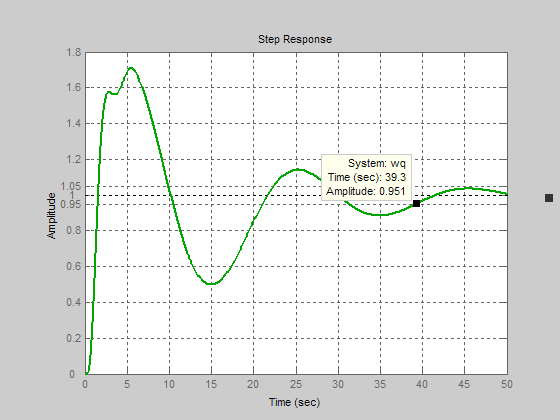
Переходные характеристики для T=10-1,8 T=10-1,9 T=10-2
с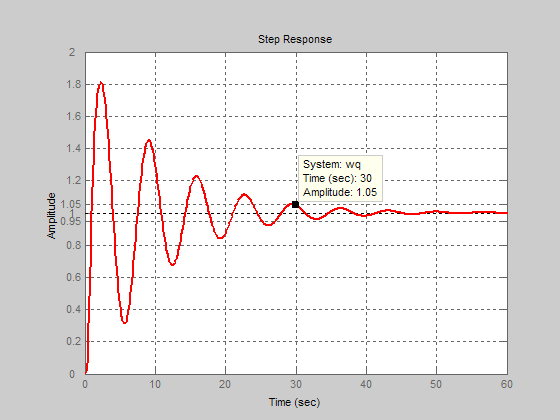 оответственно:
оответственно:
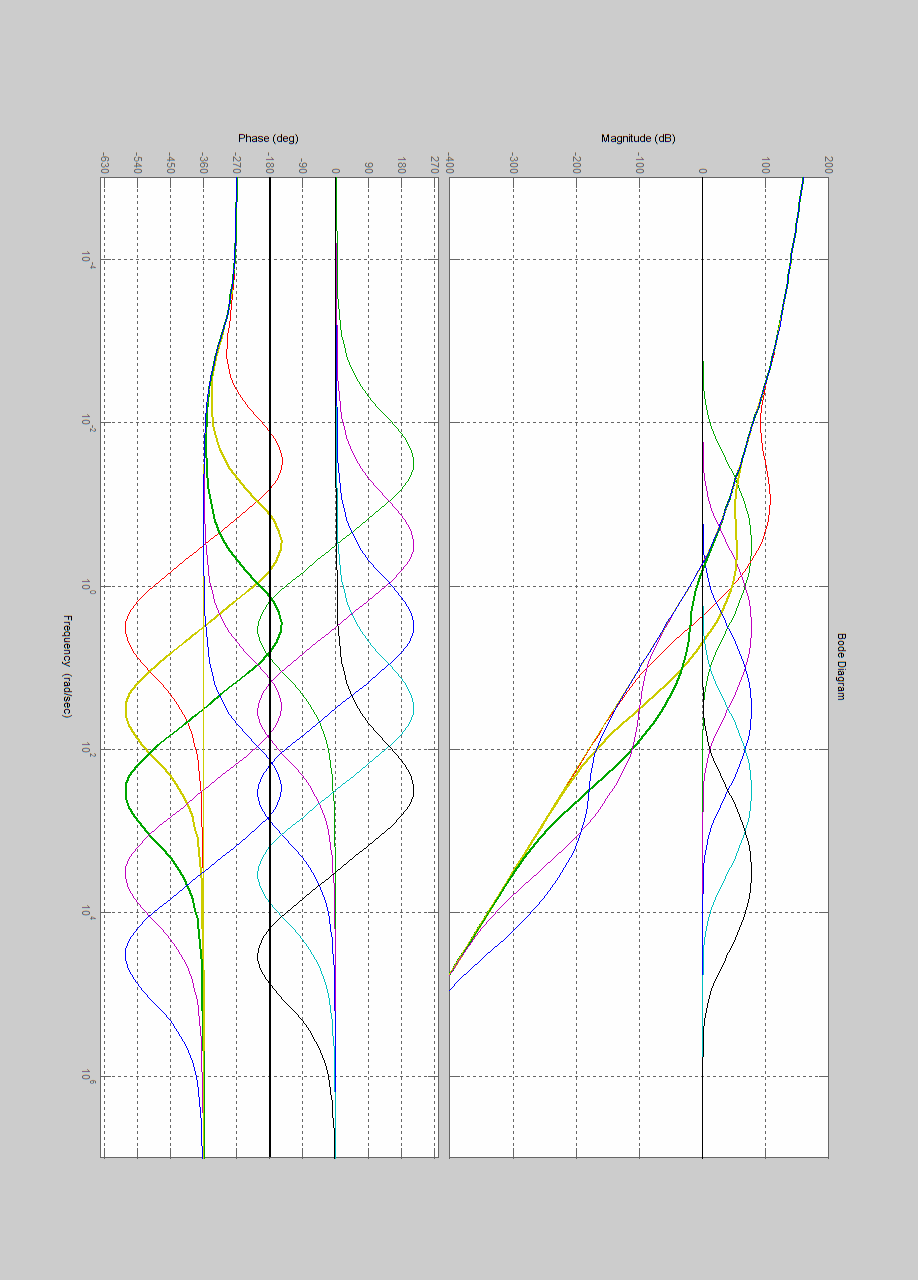
Комбинированное корректирующее звено.
Для того чтобы фазе пересечь –π и достаточно продержаться над этим уровнем, нужно обеспечить наклон -20 дБ/дек в области ωср. в коридоре две декады. Для этого используем комбинированное звено коррекции, т.е. строим желаемую характеристику.
![]()
Ф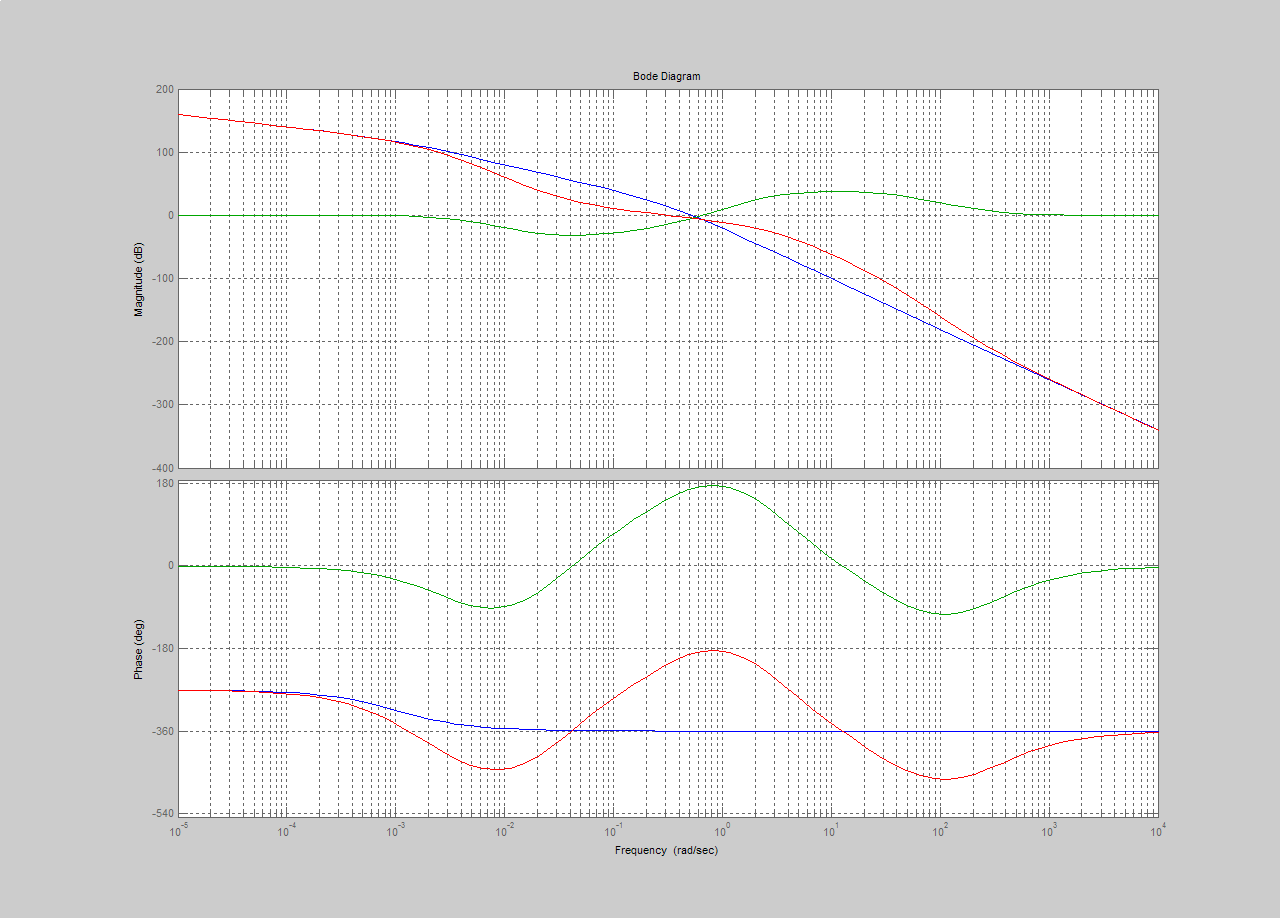 аза
не успевает дойти до уровня -180º и начинает
падать.
аза
не успевает дойти до уровня -180º и начинает
падать.
![]()

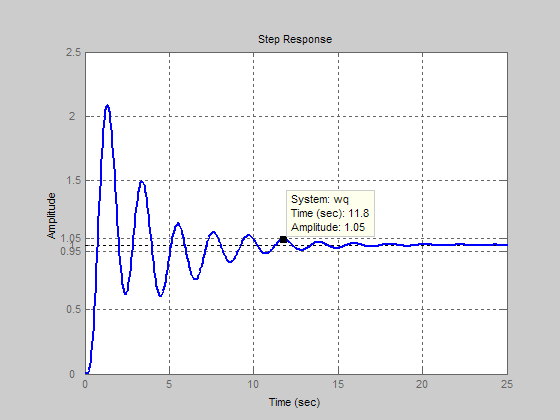
Общий вывод:
Качество системы управления характеризует переходный процесс. Чем быстрее переходный процесс, тем выше качество системы. Самой быстрой получилась система с активной коррекцией, ее время окончания переходного процесса 11.8 с.