

Министерство образования РФ

Санкт-Петербургский государственный электротехнический
университет «ЛЭТИ»

Кафедра Автоматики и процессов управления
Курсовая работа
по учебной дисциплине «ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ»
на тему «СИСТЕМА регулирования СКОРОСТи вращения двигателя»
Вариант 5
Выполнил: Кохтенко Н.В.
Группа: 3371
Руководитель:
Туренко Т.В.
Санкт-Петербург
2006
СОДЕРЖАНИЕ
1.1 Целью курсового проектирования является исследование системы автоматического регулирования скорости вращения двигателя постоянного тока. 2
1.2 Основные задачи проекта: 2
1.3 Методы, используемые в работе: 2
1.4 Программное обеспечение: 2
2.1. Сведения о назначении системы. 3
2.2. Укрупненная принципиальная схема системы управления с указанием основных элементов и их назначение. 3
Введение
1.1 Целью курсового проектированияявляется исследование системы автоматического регулирования скорости вращения двигателя постоянного тока.
1.2 Основные задачи проекта:
Построение линейной непрерывной математической модели, в форме пригодной для использования выбранных программных средств.
Анализ устойчивости и качества переходных процессов .
Коррекция системы.
Анализ чувствительности.
Цифровая реализация алгоритмов управления.
Анализ нелинейной системы.
1.3 Методы, используемые в работе:
Для синтеза устойчивой системы используется частотный метод, связанный с формированием логарифмической частотной характеристики разомкнутого контура. Чувствительность системы к не структурируемым вариациям элементов оценивается в частотной области методами структурной теории чувствительности. Задачи цифровой реализации решается упрощенно, и сводится к выбору периода квантования при котором качество процессов мало отличается от поведения непрерывной системы. Для учета влияния нелинейных факторов используется имитационное моделирование при типовых воздействиях.
1.4 Программное обеспечение:
1) Classic - анализ и частотный синтез звеньев коррекции.
2) ScrThief-ScreensaverдляDOS
3) Задачи, связанные с цифровой реализацией алгоритмов решаются с помощью программы Matlab : Control System Toolbox фирмы The Mathworks Incorporated [2].
Моделирование нелинейных систем осуществляется с помощью программы Matlab Simulink by The Mathworks Incorporated [3].
4)Оформление производится при помощи программ :
Microsoft Word
Краткое описание системы управления
2.1. Сведения о назначении системы.
Данные системы электропривода широко используются в станках с ЧПУ, приводах вращения радиолокационных антенн и других устройствах. Исполнительный двигатель постоянного тока питается от управляемого тиристорного преобразователя. Частота вращения измеряется тахогенератором постоянного тока с возбуждением от постоянных магнитов.
2.2. Укрупненная принципиальная схема системы управления с указанием основных элементов и их назначение.
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Система управления скоростью двигателя:
Коэффициент передачи двигателя кд =1.2 рад/(В*с)
Электромеханическая постоянная времени T ЭМ=0.08 с
Постоянная времени якорной цепи двигателя Tя=0.02 с
Коэффициент передачи УТП kутп=15
Постоянная времени УТП T утп=0.003 с
Коэффициент передачи усиления Ку =200
Коэффициент передачи тахогенератора Ктг =0.5 В*с/м
Время регулирования tр - минимальное
Показатель колебательности М <1.1
Тип системы астатический
ФУНКЦИОНАЛЬНАЯ СХЕМА
Упрощенная принципиальная электрическая схема системы автоматического регулирования скорости вращения двигателя постоянного тока приведена на рисунке 1. Такие системы электропривода широко используются в станках с ЧПУ, приводах вращения радиолокационных антенн и других устройствах. Исполнительный двигатель постоянного тока (мощностью от сотен ватт до нескольких киловатт) питается от управляемого тиристорного преобразователя. Частота вращения измеряется тахогенератором постоянного тока с возбуждением от постоянных магнитов.
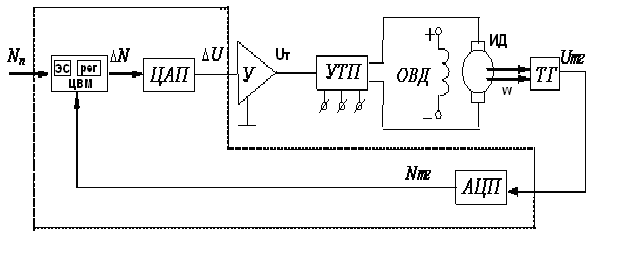 Рис.
1. Функциональная схема
Рис.
1. Функциональная схема
На рисунке 1 обозначено:
ИД — двигатель с обмоткой возбуждения ОВД и якорем ЯД;
ТГ — тахогенератор;
У — усилитель
сигнала ошибки
![]() ;
;
УТП — управляемый тиристорный преобразователь, питающий якорь исполнительного двигателя Д;
АЦП — аналого-цифровой преобразователь;
ЦАП — цифроаналоговый преобразователь;
ЭС – элемент сравнения.
Рег. – Регулятор.
Nп - задание
![]() —напряжение
выдаваемое с выхода ЦАП на усилитель.
—напряжение
выдаваемое с выхода ЦАП на усилитель.
Uт – напряжение на входе УТП.
Uдв – напряжение подаваемое на двигатель.
![]() —напряжение
тахогенератора;
—напряжение
тахогенератора;
w– скорость вращения вала двигателя.
![]() —цифровой
сигнал с выхода АЦП;
—цифровой
сигнал с выхода АЦП;
ТГ — тахогенератор;