

Лабораторная работа 3 / 2008-05-07-23-25-Маша-LR-3
.docСанкт-Петербургский
государственный электротехнический
университет «ЛЭТИ»
кафедра АПУ
Отчет
по лабораторной работе по ОТУ №3
Параметрическая оптимизация систем управления
Группа: 5362
Проверил: проф. Имаев Д.Х.
Санкт-Петербург
2008 год
Целью данной лабораторной работы является параметрическая оптимизация системы управления.
Математическая модель в форме структурной схемы (рис. 1).
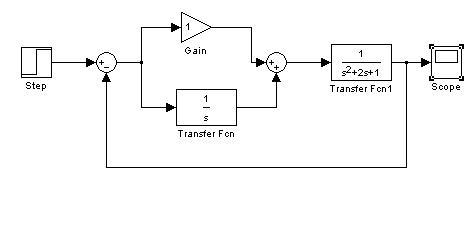
Рис. 1.
Параметры регулятора: k;Т.
ХПЗС = числитель + знаменатель ПФРС,
где ХПЗС – характеристический полином замкнутой системы;
ПФРС – передаточная функция разомкнутой системы.
ПФРС:
![]() .
.
ХПЗС:
![]() ,
где
,
где
коэффициенты:
a3=![]() ;
;
a2=![]() ;
;
a1=![]() ;
;
a0=1.
Проверим необходимое условие устойчивости (все коэффициенты должны быть положительны); оно выполняется.
Воспользуемся критерием Гурвица, для этого составим матрицу Гурвица:
H=
Критерий Гурвица заключается в том, чтобы проверять знаки диагональных миноров.
![]() ;
;
![]() ,
но так как a0
>0 всегда, то надо проверять только
знак
,
но так как a0
>0 всегда, то надо проверять только
знак
![]() .
.
Следует заметить, что средние коэффициенты играют стабилизирующую роль, а крайние – дестабилизирующую.
В условие устойчивости параметры входят в символьном виде; запишем их в явном виде:
![]()
![]() (должно
быть) или 2T(1+k)-1>0.
(должно
быть) или 2T(1+k)-1>0.
Это выражение позволяет выделить на плоскости k, T область устойчивости (рис.2).
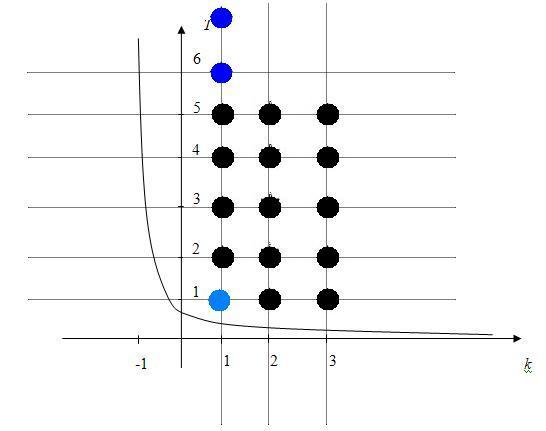
Рис. 2
Отметим три типа различных корней соответствующими символами:
Границу устойчивости получим, заменив неравенство на знак равенства
![]() ;
;
это гипербола, если k= -1, то гипербола уходит в бесконечность.
Возможны 3 случая:
-
3 корня отрицательные вещественные;
-
пара комплексных и 1 действительный корень, при этом доминируют комплексные корни:
-
пара комплексных и 1 действительный корень, при этом доминирует действительный корень.
Можем воспользоваться двумя способами:
-
MATLAB/Control System Toolbox
-
Simulink.
Воспользуемся первым из них. Назначим
>>k=1;T=1;
Передаточную функцию разомкнутой системы получим по команде:
>>osys = (k+tf(1,[T 0]))*tf(1,[1 2 1])
Transfer function:
s + 1
---------------
s^3 + 2 s^2 + s
замыкаем единичную отрицательную обратную связь:
>>csys = feedback(osys,1)
Transfer function:
s + 1
---------------------
s^3 + 2 s^2 + 2 s + 1
Проверим устойчивость системы, проверяя корни ХПЗС (собственные значения матрицы системы):
>>eig(csys)
ans =
-1.0000
-0.5000 + 0.8660i
-0.5000 - 0.8660i
Найдем границы областей с различным характером движения, для этого выбираем точки и соответственно получаем области с 3 типами распределения корней.
-
При k=0 и T>6.8 корни вещественные <0;
-
При k=1 и T=1, при k=0.5 и T=0.5 получаем второй случай, когда доминируют 2 комплексных корня;
-
При k=2 и T=1, k=2 и T=2, k=1 и T=3 точки попадают в область, где доминирует действительный корень.
Проанализируем ПХ с помощью команды:
>> step(csys)
Результаты представлены на рис. 3.
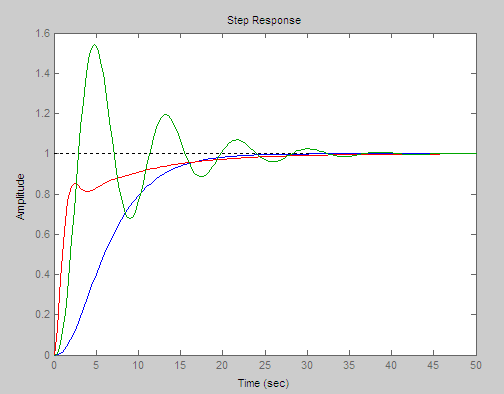
Рис. 3.
Выберем критерий оптимальности в виде минимума времени процесса:
tp → min
при ограничении
![]()
Находим k и T оптимальное:
k = 1.19;
T = 1.15;
tp = 4.44 c
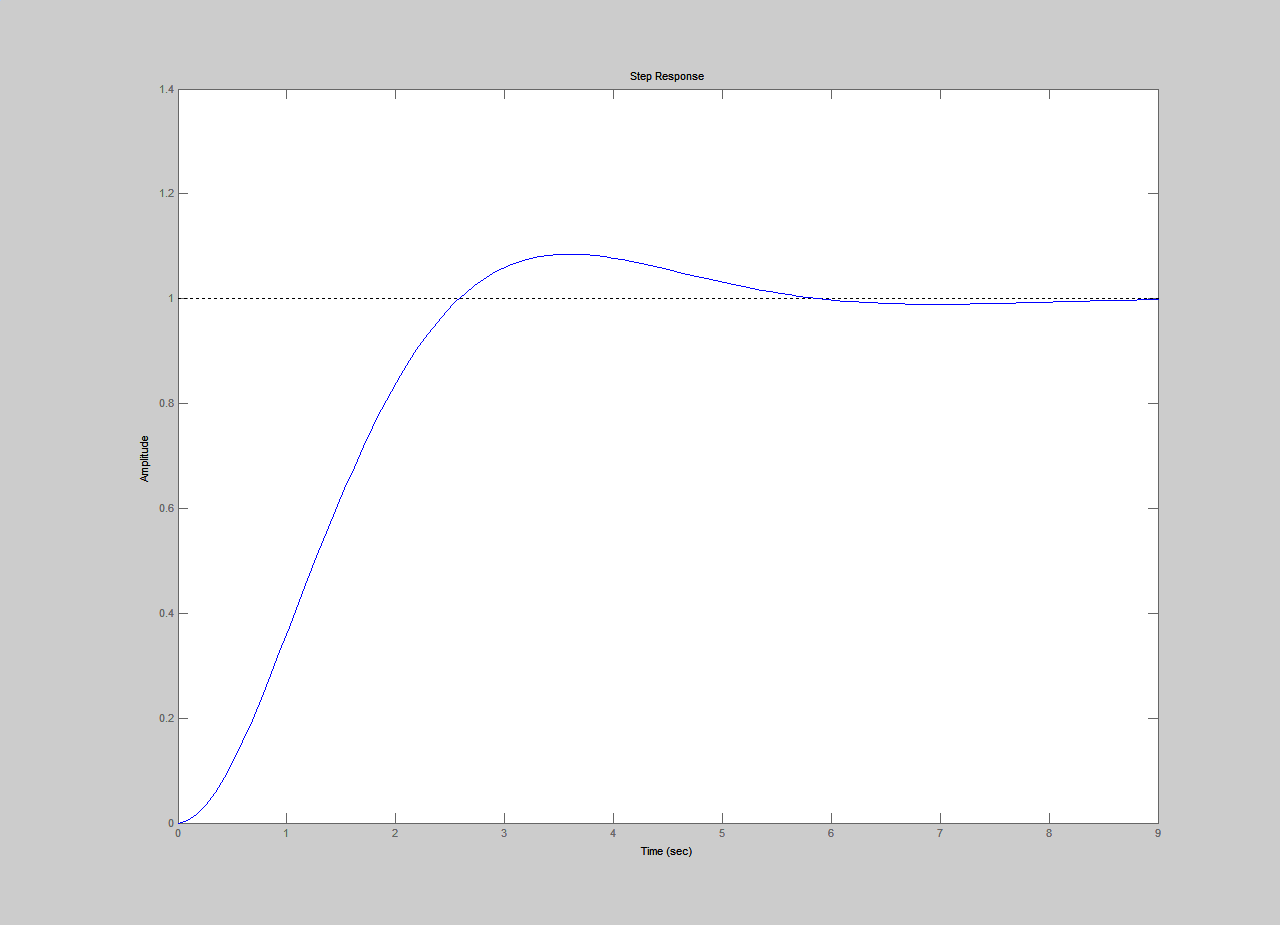
Рис. 4
Для этого сделаем еще несколько шагов влево, вправо, вверх и вниз.
Пусть k=1.584 и T=1.15,
тогда ![]() ,
следовательно, точка (1.32; 1.15) не оптимальна.
,
следовательно, точка (1.32; 1.15) не оптимальна.
Пусть k=1.9 и T=0.89,
тогда ![]() ,
следовательно, точка (1.9; 0.89) не оптимальна
,
следовательно, точка (1.9; 0.89) не оптимальна
Пусть k=1.9 и T=1.45,
тогда ![]() ,
следовательно, точка (1.9; 1.45) не оптимальна
,
следовательно, точка (1.9; 1.45) не оптимальна
Пусть k=1.9 и
T=1.15, тогда
![]() ,
следовательно, точка (1.584; 1.15) не оптимальна
,
следовательно, точка (1.584; 1.15) не оптимальна
Пусть k=2.2810 и T=1.15,
тогда ![]() ,
следовательно, точка (1.9008; 1.15) оптимальна.
,
следовательно, точка (1.9008; 1.15) оптимальна.
Получим ПХ (рис. 5) с помощью команды:
>> step(csys)
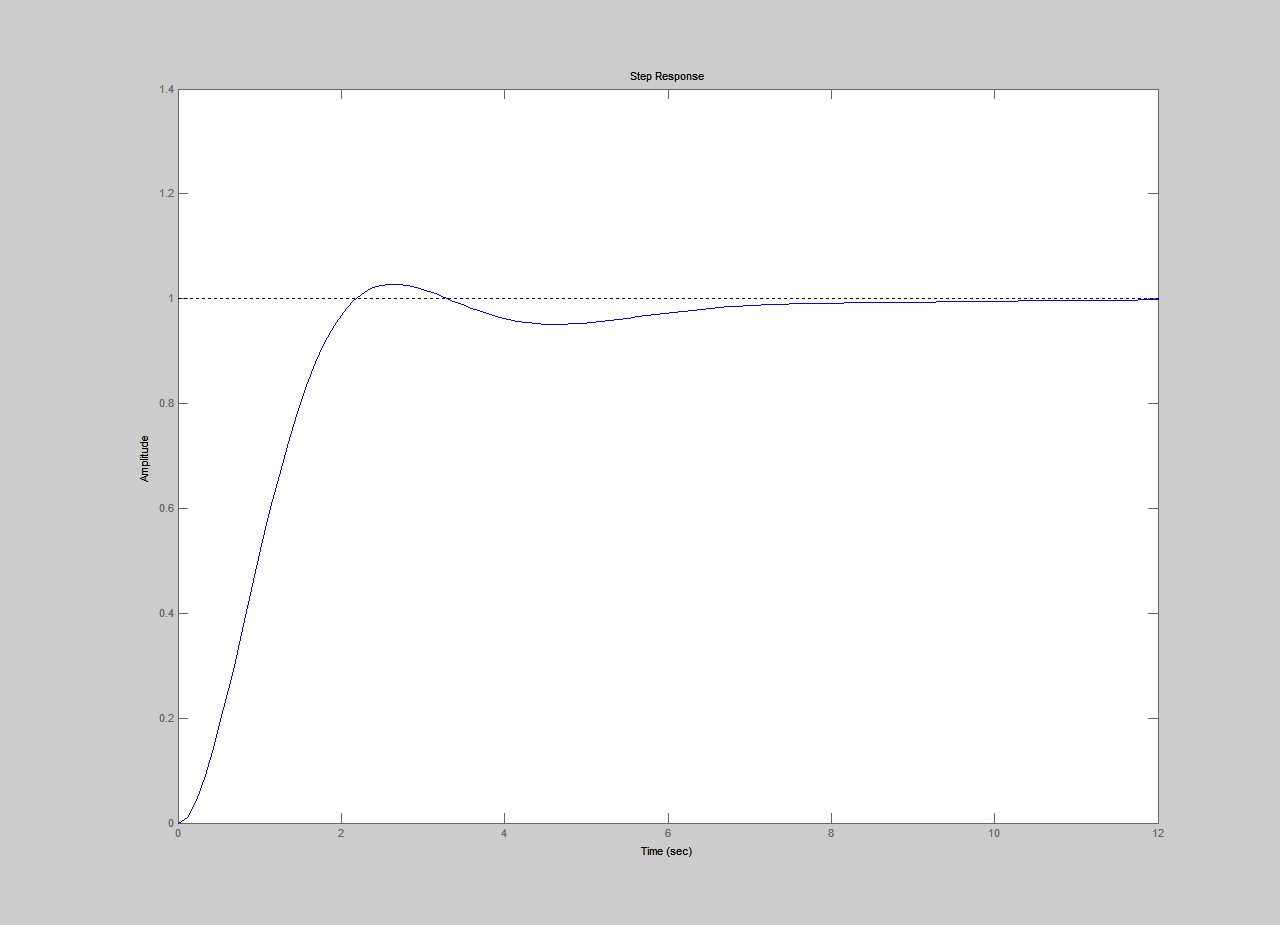
Рис. 5
Получим ЛЧХ и ФЧХ для разомкнутой системы (рис. 6).
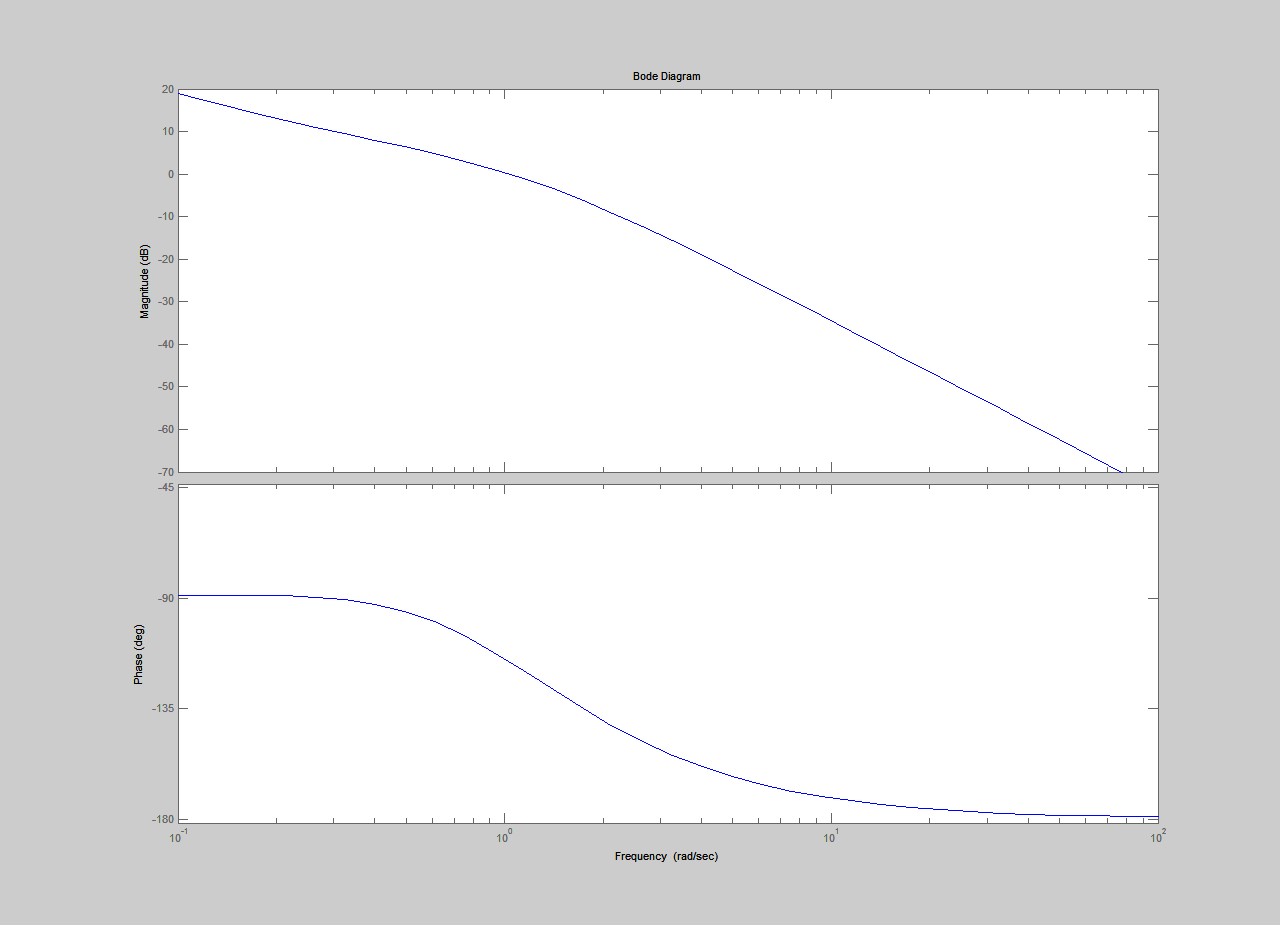
Рис. 6
Выводы:
-
в данной работе найдена область устойчивости системы.
-
нашли оптимальное значение k=1.9 и T=1.15, так как значение является минимальным при этом корни ХПЗС получились равными:
-0.841 + .428i
-0.841 - 1.428i
-0.316 .